航管一次雷达精细化点迹处理设计与实现∗
2015-01-22雷远宏
韩 燕,雷远宏
(1.中国电子科技集团公司第三十八研究所数字阵列技术重点实验室,安徽合肥230088; 2.中国电子科技集团公司第三十八研究所智能情报处理重点实验室,安徽合肥230088)
0 引言
随着航管雷达对出行旅游的影响力越来越重要,对雷达新功能的要求伴随着新技术、新体制的不断发展而发生变化。新一代的航管雷达除了保障民航飞机的正常飞行外,还要对复杂多变的空间环境做出响应,并采取不同的措施进行有效处理[1]。航管一次雷达精细化点迹处理在距离、方位、幅度上通过对信号检测回波参数信息的分析,提取出一组目标参数信息;然后根据目标的一些特征参数信息,进行目标的点迹质量判别、固定回波/干扰回波/慢动回波等有效抑制[2],得到最佳的目标参数信息。点迹处理流程包括初始回波处理、点迹凝聚、点迹滤波。
1 点迹处理设计与实现
1.1 初始回波处理算法分析
初始回波处理是点迹处理的前级,通过控制送往点迹凝聚的回波参数总量,防止点迹处理器过载,确保目标点迹的准确检测。初始回波处理将雷达威力图按距离和方位划分为若干个子单元,对应每个雷达子单元,计算其输出的过门限回波数(EP数)。然后根据初始目标处理使能控制参数,判别子单元的EP密度是否大于最大密度门限,大于则根据EP的归一化幅度(即幅度与杂波的比值)门限进行EP滤波处理。即子单元内幅度大于最大幅度或小于最小幅度的EP首先被消除,确保子单元内的EP数保持在一定范围内,从而防止个别子单元由于存在大量EP而形成虚假点迹[2]。图1给出了初始回波处理的流程图。
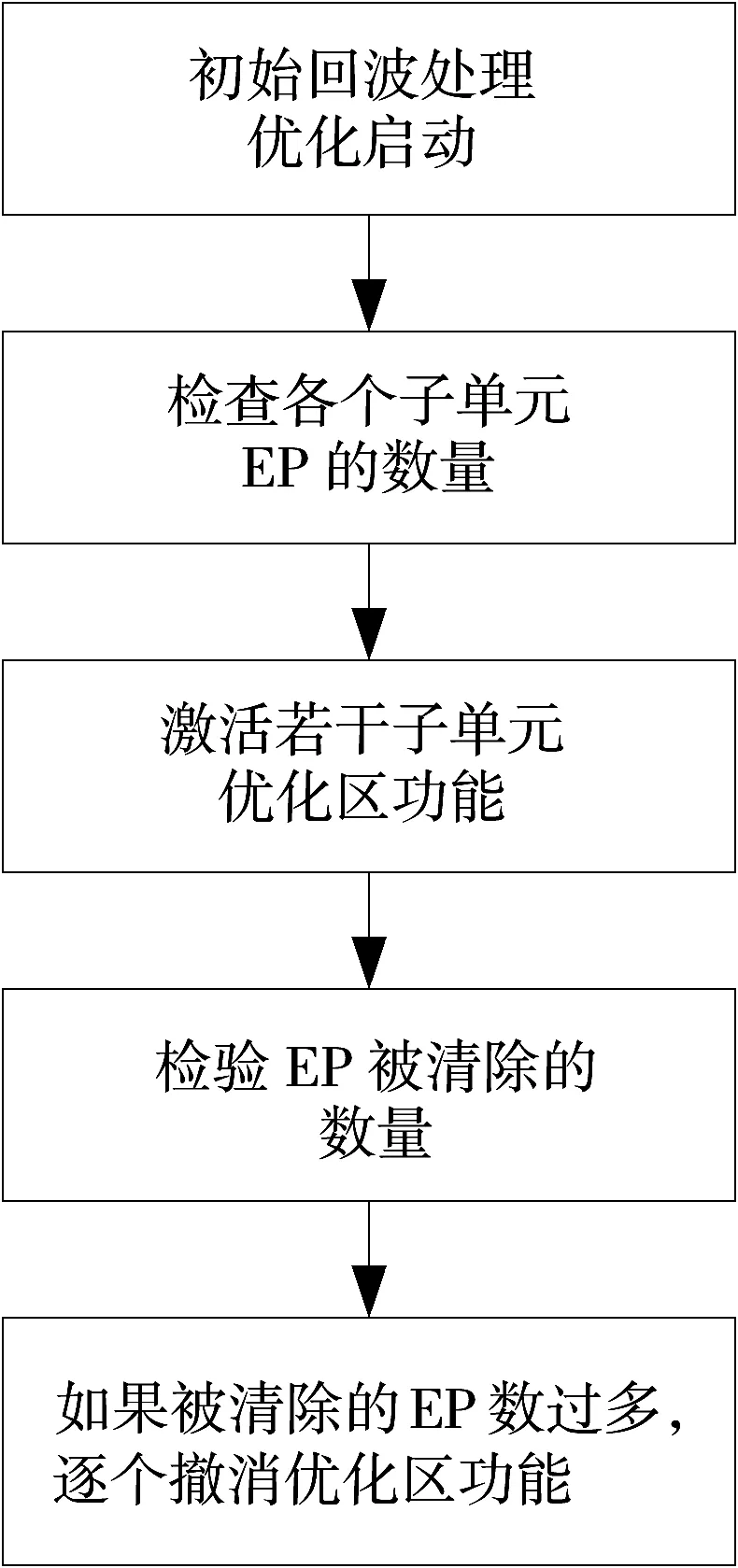
图1 初始回波处理算法流程图
1.2 点迹凝聚处理算法分析
点迹凝聚处理在初始回波处理后进行,通过分析雷达威力图上的EP数分布,建立一个基于初始回波在距离、方位、幅度上的相关模型,采取相应的算法设计,从而提取一组目标参数信息。在实现方法上,通过设计一套通用的软件架构将这些算法有效地串联起来[3],并将这些算法细分为多个软件模块。
点迹凝聚设计思想源于雷达系统设计中,已有一套比较成熟的算法,主要涉及到在距离项上的距离凝聚处理、方位项上的方位凝聚处理、仰角项上的目标测高处理、速度项上的解速度模糊处理[3-7]。图2给出了点迹凝聚处理的流程图。
1.3 点迹滤波处理算法分析
点迹处理完成点迹凝聚后,点迹需经过干扰点迹抑制、固定回波点迹抑制、慢动回波点迹抑制和点迹门限四级滤波处理[1],方能形成最终的一次雷达点迹,而后再送往数据处理。点迹滤波的目的是滤除虚假EP所形成的点迹。干扰区点迹抑制是在一定的判断和滤波准则(即干扰区参数)约束下,检查是否存在干扰点迹,并将其滤除。固定回波点迹抑制和慢动回波点迹抑制与此类似,按照一定的准则滤除上述虚假点迹。最后一级为点迹门限处理,依据雷达威力范围内点迹进行点迹质量判别,对低质量点迹进行最后一次有效滤波。图3给出了点迹滤波处理整个流程图。在实际工程中,由于雷达功能需求不同,对于以上四级滤波处理,可以通过裁减、组合来满足雷达系统工程应用。
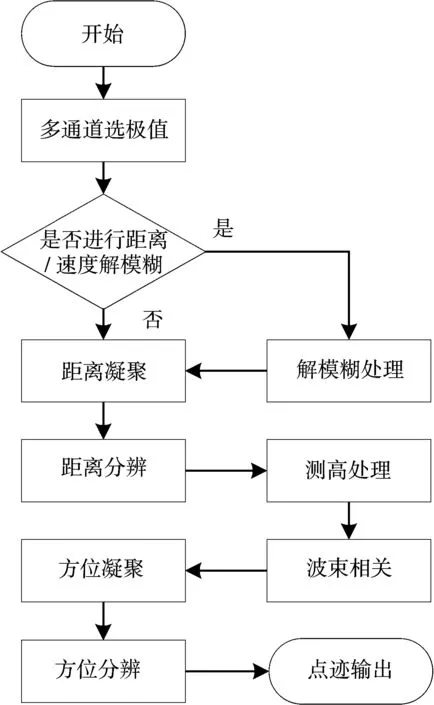
图2 点迹凝聚处理算法流程图
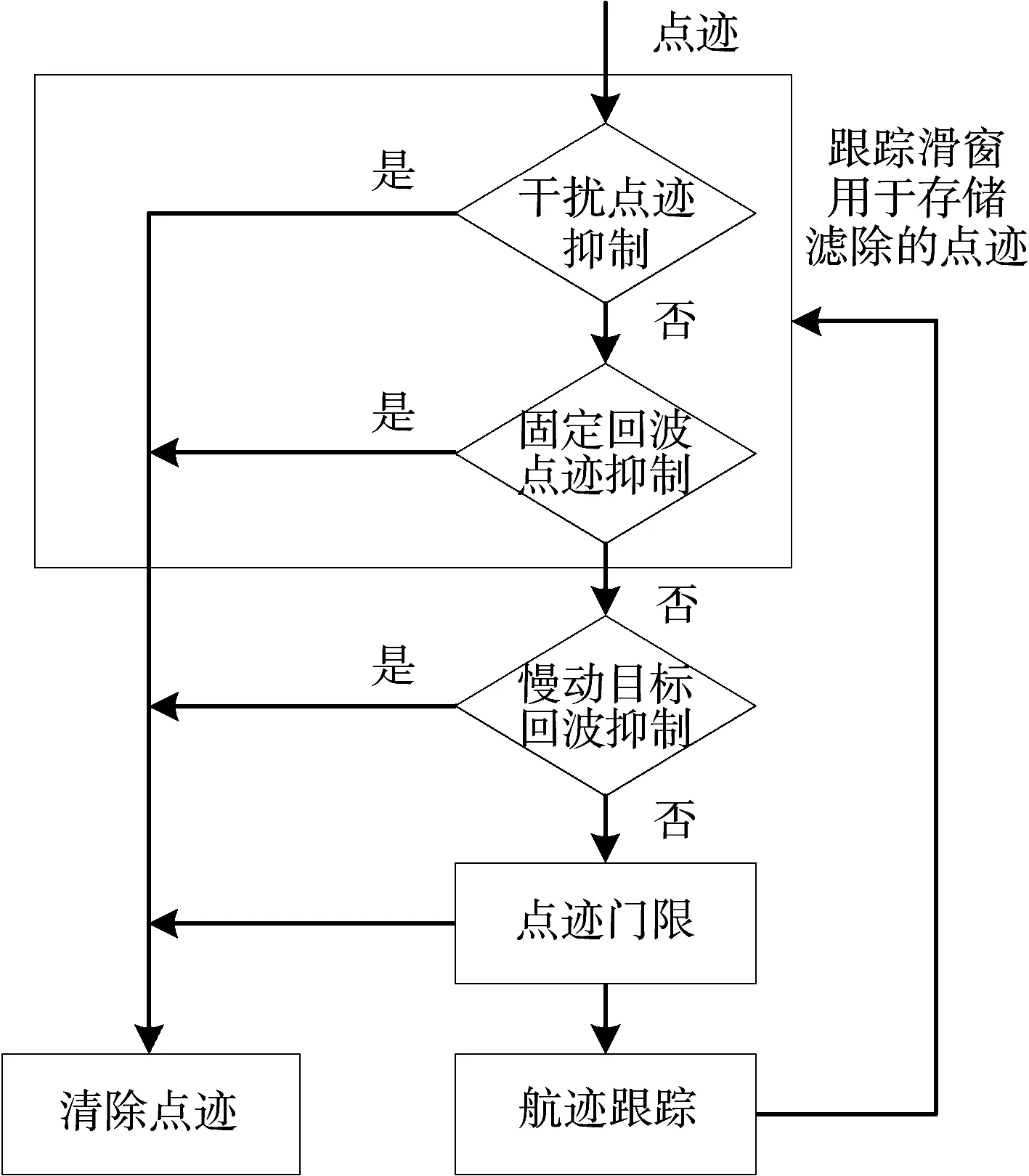
图3 点迹滤波处理算法流程图
1.3.1 干扰点迹抑制处理
干扰点迹抑制主要目的是减少同频段相邻雷达干扰所造成的虚假点迹数和其他异步干扰所形成的虚假点迹数,在雷达终端界面上按距离和方位划分若干的扇形区域,计算扇区内点迹数量,并与两个门限(即干扰数目的最小值/最大值参数)进行比较。当点迹数大于最大值门限,在该区域内检测到的点迹将自动删除;当点迹数小于最小值门限,该区域内的点迹正常处理;点迹数介于二者之间,点迹将被标识为“干扰点迹”,并在终端界面上显示但不用于航迹处理;当航迹跟踪窗与干扰区重叠时,重叠区域内的点迹将被保留,并用于航迹相关处理,点迹抑制功能可根据实际情况决定是否启用。
1.3.2 固定回波点迹抑制处理
固定回波点迹抑制主要消除固定杂波区内地物杂波剩余,固定回波点迹的形成主要是由靠近雷达站附近的地面杂波、城市杂波以及高山反射回波等组成,表现的特征为在固定回波出现的位置信息(距离和方位)基本不变或变化很小,而且不是每帧都出现。针对这样的特性,在对某些位置出现的固定杂波进行帧间匹配,如果能够匹配上则进行帧间计数,然后按照帧间滑窗的方式进行准则提取,满足一定准则范围的杂波目标可以判定为固定杂波,当航迹跟踪窗与固定回波重叠时,重叠区域内的点迹可以用作航迹相关处理,但需要标注为“固定回波点迹”。
1.3.3 慢动回波点迹抑制处理
慢动回波点迹抑制主要对公路车辆目标点迹、气象杂波点迹、海洋湖泊船舶点迹等慢速目标进行优化处理,其中气象杂波点迹可以依据气象信息来获取气象位置信息进行抑制处理,其他慢速目标点迹可以通过人工划分区域来进行抑制处理,其步骤为在雷达终端界面上按距离和方位划分若干的慢速目标扇区,对扇区内每个目标点迹参照形成点迹的EP数、点迹的相对幅度、点迹的方位宽度等三要素进行点迹质量评估,判别目标点迹参数是否符合质量评估范围,符合的点迹被标识为“慢动回波点迹”。
1.3.4 点迹门限处理
当雷达的局部空域由于点迹过多,影响航迹相关处理并产生虚假航迹,且通过干扰区、固定杂波区和慢动回波区点迹抑制效果不明显时,可启动点迹门限处理。首先将有效处理空域分为若干环状扇区的子单元,然后依据每个子单元点迹的密度启动点迹门限处理功能,按照相应的准则进行点迹滤波优化处理。点迹门限处理依据点迹的质量等级特征参数(包括EP数等级、相对幅度等级和方位宽度等级等),动态调整上述扇区的点迹滤波参数或准则,从而降低虚假点迹数及其对航迹相关处理的影响。点迹门限处理是最后一级点迹滤波单元,其目的是减少虚假回波所产生的虚假点迹数,并最终降低雷达的虚警率。点迹门限处理功能启动与否主要取决于扇区内的点迹密度。
2 点迹处理算法验证
点迹处理算法的设计可以通过多种方式进行验证,其中最直观的方式是通过显示终端判别算法实施的有效性,通过对比可以观察点迹处理输入前/后的目标回波变化。图4给出了信号处理检测后的输入回波图,图5给出了点迹处理后的输出回波图。通过上述两幅图的对比可以发现,经过初始回波处理、点迹凝聚和点迹滤波三级处理后的回波数量明显减少,并且该方法能够有效地剔除由干扰回波、固定回波和慢动回波等引起的低质量等级点迹,从而提高点迹质量。
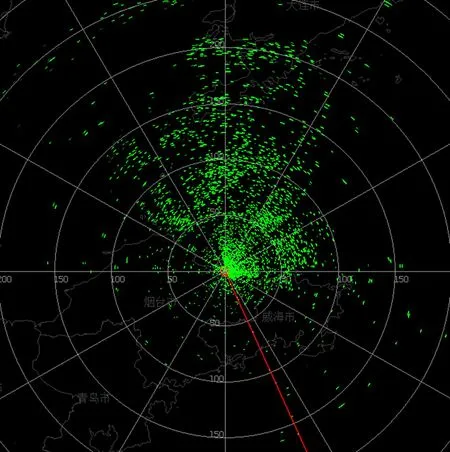
图4 信号处理检测后的输入回波图
3 结束语
本文介绍了航管一次雷达下一种精细化点迹处理算法,结合该算法的应用,可以对回波目标以及周边环境参数进行有效特征提取,提高复杂环境下的目标发现和检测概率,能为工程应用提供必要的参考。另外,本文中的一些关键技术已通过航管一次雷达的验证,可以通过裁减、组合来满足雷达系统工程应用。
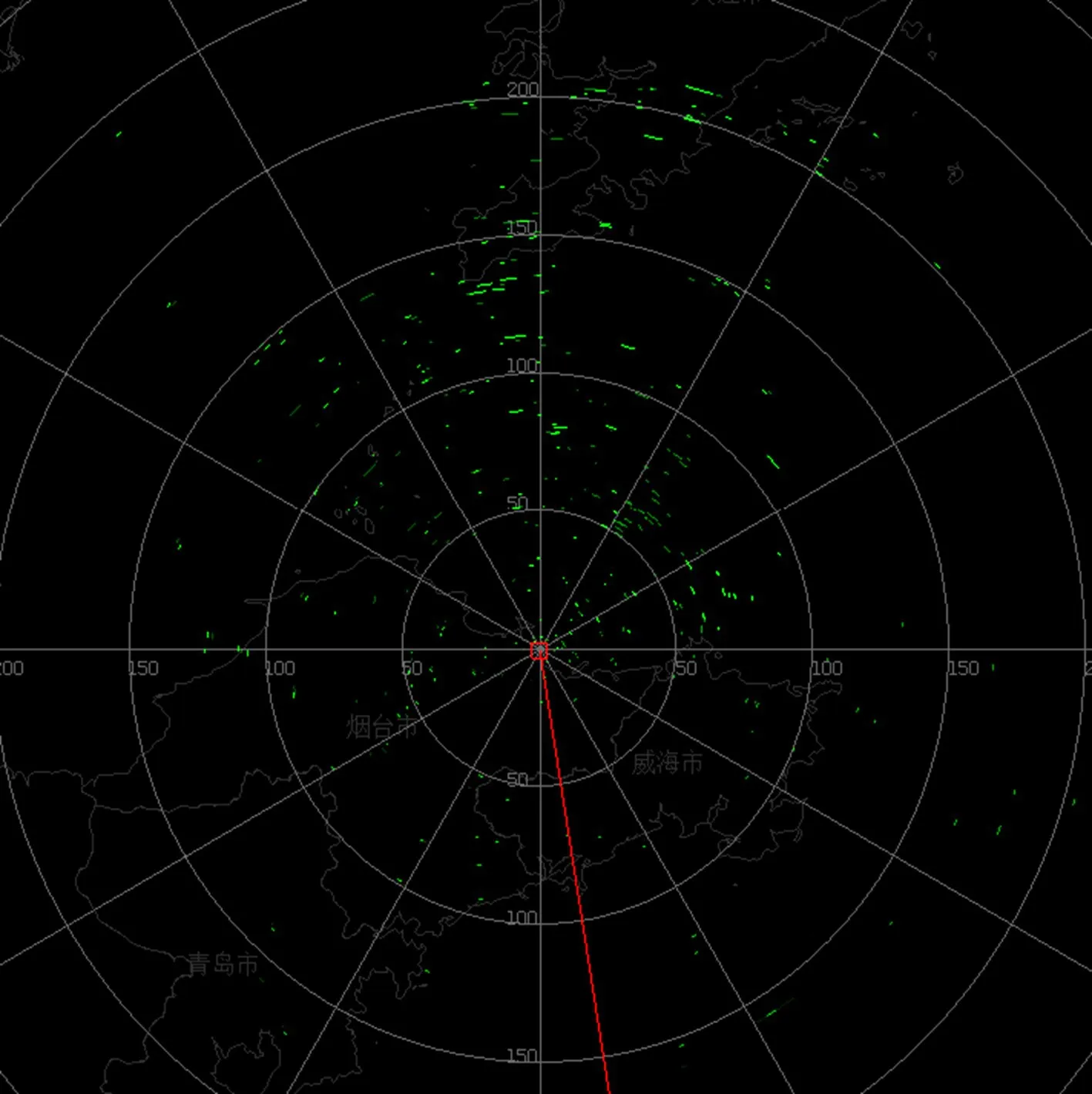
图5 点迹处理后的输出回波图
[1]陈辉,林强,徐敬伟,等.雷达阵地现场优化模糊综合评估方法研究[J].雷达科学与技术,2012,10(6): 574-579.
CHEN Hui,LIN Qiang,XU Jing-wei,et al.The Method of Fuzzy Synthetic Evaluation on Radar Site Optimisation[J].Radar Science and Technology, 2012,10(6):574-579.(in Chinese)
[2]林强,译.TRAC 2000N雷达优化指导手册[M].武汉:空军预警学院,2012.
[3]雷远宏.地面常规雷达体制下的点迹凝聚算法分析[J].硅谷,2012(7):177-178,139.
[4]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[5]SKOLNIK M I.雷达手册[M].2版.王军,林强,米慈中,等译.北京:电子工业出版社,2003.
[6]周喃.一种基于三坐标雷达的点迹凝聚方法[J].雷达与对抗,2013,33(4):46-50.
[7]董巍.基于Vx Works的雷达点迹数据处理系统的设计与实现[J].信息化研究,2009,35(9):26-28.
