基于驾驶行为的驾驶倾向特征辨识
2013-12-18谭德荣张晓琳董春迎
商 强, 谭德荣, 张晓琳, 董春迎
(山东理工大学 交通与车辆工程学院, 山东 淄博 255091)
在人-车-路-环境组成的道路交通系统中,驾驶员通过处理各种信息来操控车辆.驾驶员的内在因素对行车安全有重要影响.因为驾驶员的个体差异而具有的不同驾驶特征,可以归为驾驶员的驾驶倾向性[1],体现了驾驶员在行车过程中的内在趋向.准确识别驾驶倾向能够提高汽车辅助驾驶系统的适用性.国内外对驾驶倾向的研究通常注重驾驶员个体心理特征及其对驾驶行为的影响,在相对静态条件下对驾驶员进行心理测试,以及分析驾驶员心理状态对道路交通安全的影响[2-4].有少数研究将驾驶员的特性引入到了汽车主动安全系统的理论研究中[5-6],但没有详细给出驾驶员个体特性的在线识别方法.本文通过对驾驶行为的分析,根据试验数据,建立驾驶倾向辨析模型,为进一步研究汽车安全预警提供支持.
1 驾驶倾向划分及识别原理
驾驶倾向涉及的因素众多[7],本文主要考虑驾驶倾向性的两个部分.第一部分是驾驶员内在激进性,根据个体特征可分为冒进型、普通型和保守型.冒进型驾驶员活泼好动、易产生冒险动机,易于高速行车和超车.普通型驾驶员一般性情安静、自制力强、遵守交通规则,在条件完全允许的情况下选择超车及快速行驶.保守型驾驶员情绪不易外露,也不易产生冒险动机,易低速行车且很少超车,但是遇到紧急情况易惊慌失措.本文选取加油频率、制动频率和变道超车频率作为自由行车条件下的驾驶倾向性的判断指标,选取加油频率和制动频率作为跟驰状态下的驾驶倾向性判断指标.驾驶倾向性第二部分是操作稳定性程度,根据动作深度可分为兴奋型和稳重型,由驾驶员操作紧急程度来判断.如果驾驶员在行车过程中出现较多次数的急刹车和紧急加速情况,则说明该驾驶员驾驶操作不稳定,归为兴奋型.这种类型驾驶员在行车过程中存在一定安全隐患.本文选取驾驶员紧急刹车和紧急加油的比例作为驾驶倾向性第二部分的判断指标.驾驶倾向性的划分如图1所示.限于篇幅,本文只作了自由流条件下的驾驶行为数据提取及驾驶倾向识别建模.
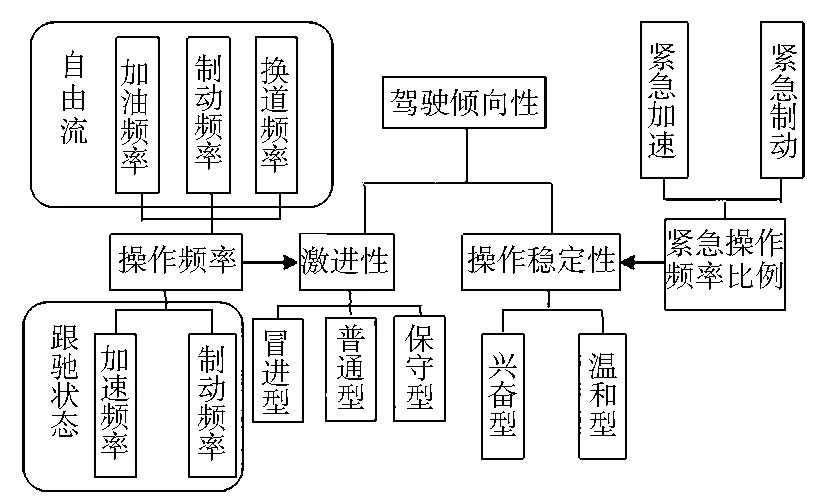
图1 驾驶倾向性的划分及识别原理
2 试验方案设计和数据采集
2.1 试验方案设计
2.1.1 试验样本的选取
随机抽取300名驾驶员,其中包含部分职业驾驶员,年龄分布在20~60岁,驾龄在1年以上.首先进行问卷测试,初步确定他们的驾驶倾向并分类,从中选择驾驶倾向性较为明确的驾驶员进行驾驶模拟测试,检验模拟驾驶操作特性是否与其问卷测试结果相符.然后从两项测试结果相符的驾驶员中选取每种类型的驾驶员各7名,共计42名,其中包括8名女性驾驶员.最后对选定的这42名驾驶员进行实车试验,采集所需数据(从每种类型的7名驾驶员中,选取5名的试验数据用于模型的训练,剩余2名的试验数据将用于模型验证).
2.1.2 试验环境的确定
试验地点为流量较小的城市主干道,车流状态可认为是自由流.试验时间为非节假日或周末的上午9点~10点40分,共计100min.天气状况良好.
2.1.3 对被测驾驶员的要求
确保驾驶员睡眠充足,身体状况良好,48h内没有饮酒和服用药物,近期内心情平静,家庭、工作及生活均处于正常状态.
2.2 数据采集
需要获取的驾驶员驾驶行为数据包括:加速频次、制动频次、换道频次、紧急加速频次和紧急制动频次.驾驶员的加速和制动深度及频次分别由安装在加速和制动踏板下的电子尺测得,紧急加速和紧急制动由踩下踏板的深度来确定.规定加速踏板最大深度值为1,大于0.9即为紧急加速;规定制动踏板最大深度值为1,大于0.8即为紧急制动.换道频率由车内监控录像提取.
3 驾驶倾向辨识模型的建立
BP神经网络由三部分组成:输入层、中间隐含层和输出层.这三个部分之间通过各层节点之间的连接权依次前向连接.中间隐含层可为一层或多层.对于一个三层网络,可以实现以任意精度近似任何连续函数. BP网络的基本原理是利用梯度下降法将误差函数予以最小化.
3.1 神经网络模型的建立
3.1.1 输入层的确定
输入层是驾驶行为数据,包括加速频率、制动频率、换道频率、紧急加速比例和紧急制动比例共5个神经元,他们构成了输入向量.
3.1.2 输出层的确定
输出层为驾驶倾向的评判向量,共5个神经元.前3个神经元用于判定驾驶倾向的第一部分,分别代表冒进、普通、保守;后2个神经元用于判定驾驶倾向的第二部分,分别表示兴奋型和温和型.用数字1表示当前驾驶倾向,而其它用0表示,则得到期望输出向量(1 ,0 ,0 ,1 , 0),(1, 0, 0, 0, 1),(0, 1, 0, 1, 0),(0, 1, 0, 0, 1),(0, 0, 1, 1, 0),(0, 0, 1, 0, 1),分别表示的驾驶倾向类型为冒进兴奋型、冒进温和型、普通兴奋型、普通温和型、保守兴奋型和保守温和型.
3.1.3 隐含层的确定

图2 驾驶倾向识别模型
3.1.4 模型的算法
BP网络的单个神经元模型如图3所示.其中,x=[x1x2…xm]T为网络输入,w=[w1w2…wm]T为连接权值,b为阀值,f为传递函数.前向计算过程为
u=f(wTx+b)
本模型隐层传递函数为tansig,输出层传递函数为purelin,训练函数为trainlm,其余参数用matlab神经网络工具箱的默认值[8].
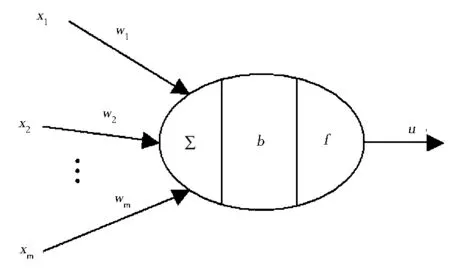
图3 BP网络神经元
3.1.5 训练样本的构造
试验所得驾驶员在100min内的驾驶操作频次,不能直接作为训练样本.若将每100min为一结算时间段,时间太长,会极大降低实时性.但是,太短的时间段内驾驶员的操作次数大多数为0,存在很大的偶然性,无法体现不同驾驶倾向的驾驶员的差异性.因此,在此选择每10min作为一个结算时间段,将采样时间100min划分为10个时段,取每个时段操作频率的均值作为训练样本.训练样本的输入向量P= (加速频率,制动频率,换道频率,紧急加速比例,紧急制动比例).输出样本T即为表示驾驶员驾驶倾向的目标向量.部分训练样本见表1.
3.1.6 网络训练
用Matlab神经网络工具箱对所建立的BP神经网络进行训练.训练后的网络性能误差曲线如图4所示,经过34步的训练,网络误差接近于0,满足要求.

表1 训练样本

图4 网络性能误差曲线
输入层和隐含层间的权值为

输入层和隐含层间的阀值为
b1=[-46.2655 7.9689 65.9515 -6.9750
-9.0168 -0.6015]T
隐含层和输出层间的权值为

隐含层和输出层间的阀值为
b2=[-5.6554 6.1554 0.5000 0.5000 0.5000]T
3.2 模型验证
各类型剩余2名驾驶员的试验数据用于模型的仿真验证.将驾驶员的操作频率数据输入模型,得到输出结果并取整.如果最终结果与判定向量的形式完全一致,则说明模型有效.共输入120组数据,准确识别107组,13组不能准确识别.识别率为89.2%.模型输入和输出的部分数据见表2.本文所构造的驾驶倾向识别模型,能够通过驾驶员的操作频率,实现对驾驶倾向的判定,识别率较高,为实时分析驾驶倾向特征提供了一种有效的方法.
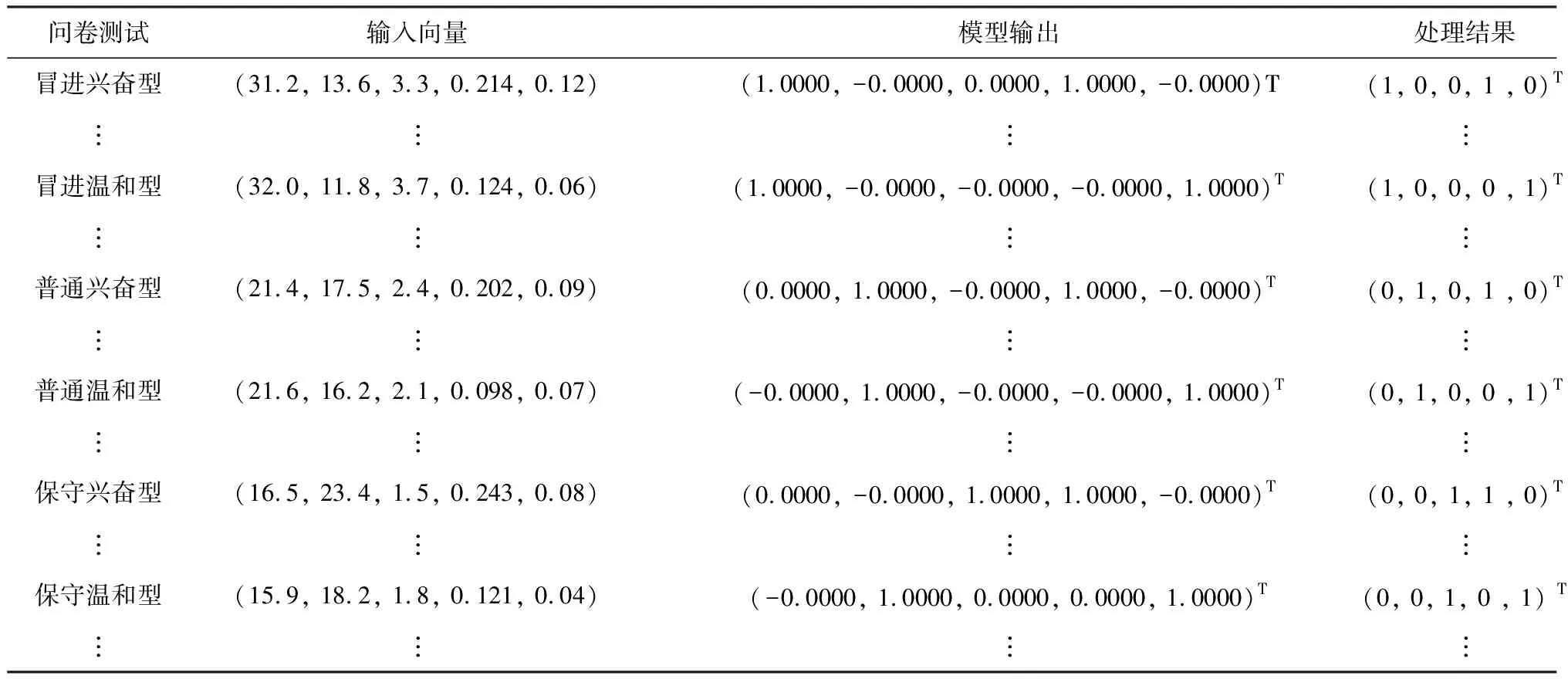
表2 模型输入和输出的部分数据
4 结束语
本文将驾驶倾向性简化为驾驶激进性和操作稳定性两部分,构建了基于驾驶行为的驾驶倾向辨识模型,识别率达89.2%. 由于驾驶行为的影响因素众多,还要进行大量的后续研究工作,以提高模型的适用性和可靠性.改进模型可从以下方面出发:(1)减少问卷调查中的主观因素影响,可配以对驾驶员的跟踪调查;(2)提高试验条件精确性;(3)增加参加试验的驾驶员数量来增加训练样本数量.
[1]王晓原,张敬磊,张元元.汽车驾驶倾向性研究进展[J].山东理工大学学报:自然科学版, 2011, 25(6): 1-5.
[2]马艳丽,王耀武.驾驶员注意分配特性及其对行车安全的影响 [J].交通运输工程学报, 2009, 9(4): 115-117.
[3]冯忠祥,刘静,李阳阳, 等.攻击性驾驶行为选择模型及影响因素敏感度分析[J].中国公路学报, 2012, 25(2):106-112.
[4]Hamdar S H,Mahmassani H S,Chen R B. Aggressiveness propensity index for driving behavior at signalized intersections [J]. Accident Analysis and Prevention, 2008,40: 315-326.
[5]王建强,迟瑞娟,张磊,等.适应驾驶员特性的汽车追尾报警-避撞算法[J].公路交通科技, 2009, 26(s1): 8-12.
[6]Abe G Y,Richardson J. Alarm timing, trust and driver expectation for forward collision warning system [J]. Applied Ergonomics, 2006, 27: 577-586.
[7]王晓原,张敬磊,张元元.基于交互并行驾驶模拟实验的跟驰状态汽车驾驶倾向性动态辨识模型验证方法[J].数学的实践与认识, 2012, 42(1):141-149.
[8]张德丰. MATLAB神经网络应用设计[M].北京:机械工业出版社, 2008.
