基于MATLAB的双闭环直流调速系统设计与仿真分析
2013-12-18张厚升李素玲于兰兰邢雪宁
张厚升, 李素玲, 于兰兰, 邢雪宁, 季 画
(山东理工大学 电气与电子工程学院, 山东 淄博 255091)
《电力拖动自动控制系统——运动控制系统》是高校自动化专业非常重要的一门专业课,在自动化专业中有着举足轻重的作用.而转速、电流双闭环直流调速系统又是该门课程的基础内容和重点内容,双闭环调速系统具有调速范围宽、稳定性好、精度高等诸多的优点[1],在理论方面和实际工程应用方面都是非常成熟的系统.因而只有熟练的掌握它、理解它,才能更好的、深入地学习教材后面的交流调速理论.然而,双闭环直流调速系统的理论分析相对比较抽象,而且不容易理解,如果仅让同学们在试验过程中进行分析、理解,效果不明显.利用MATLAB仿真软件,让同学们在仿真建模与调试分析的过程中,逐步深入的理解双闭环系统的内容,然后再去实验室做实验,则会收到更好的效果.
本文旨在通过实例对直流双闭环调速系统进行设计、建模、仿真和分析,做出系统的整个设计过程及仿真图形,让学习者能更加深刻地认识、掌握双闭环直流调速系统,为以后的学习与应用奠定基础.
1 双闭环直流调速系统
1.1 双闭环系统的组成与工作原理

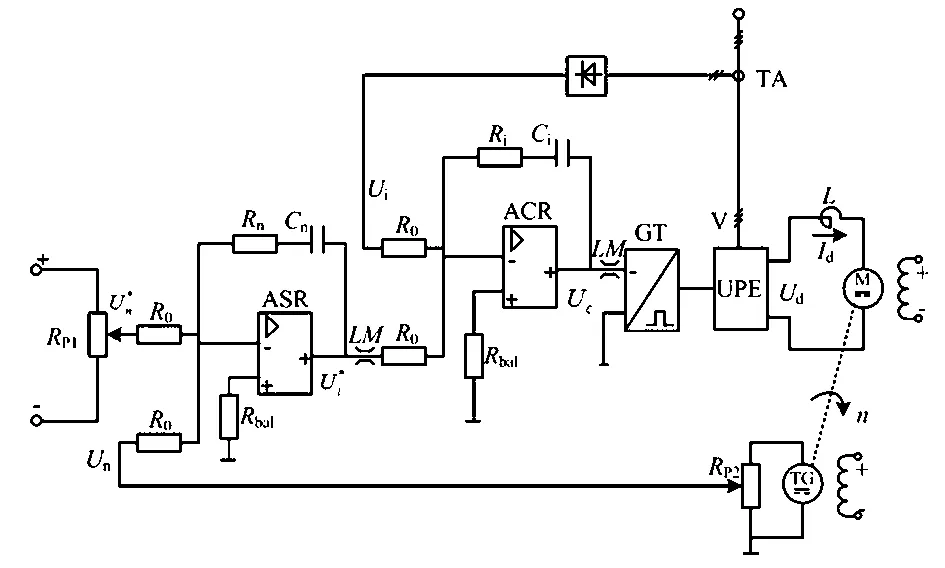
图1 转速、电流双闭环直流调速系统的电路原理图

图2 双闭环调速系统的简化结构图

1.2 双闭环直流调速系统的动态数学模型
根据前述双闭环直流调速系统的特点,不难得出双闭环系统的动态结构图,如图3所示,图中WASR(s)为转速调节器的传递函数.为了将电流反馈引出来,在双闭环系统的动态结构图中必须表示出电枢电流Id.
一般在实际使用的过程中,都需要在双闭环系统的动态结构图中增设滤波环节,该环节包括:电流滤波环节、转速滤波环节以及两个给定环节的滤波.由于在对双闭环系统的电流进行检测时,检测信号中肯定含有交流分量,因此需要增加低通滤波环节,该环节的传递函数一般可用一个一阶惯性环节来描述,其滤波时常Toi可以按照需要来选定,也即将电流检测信号滤平为准则.由于滤波环节能有效地抑制反馈信号中的交流分量,但也会导致信号的滞后.为了将此滞后作用进行平衡,我们通常在给定信号的通道中增设一个具有相同的时间常数的惯性环节,该环节就称之为给定滤波环节.他的意义可以描述为让反馈信号与给定信号都经过一样的时间延迟,使这两个信号能够在时间上配合恰当,进而可以带来系统设计上的方便.
由于采用由测速发电机进行转速反馈,那么在反馈电压中势必会含有电机的换向纹波电压,因此也需要进行滤波,滤波的时常用Ton来表示.道理与电流环一样,在转速的给定环节之后也增设时间常数为Ton的给定滤波环节[1,5].所以,在实际中使用的双闭环调速系统的动态结构图可以描述成如图4所示的形式.

图3 双闭环直流调速系统的动态结构图
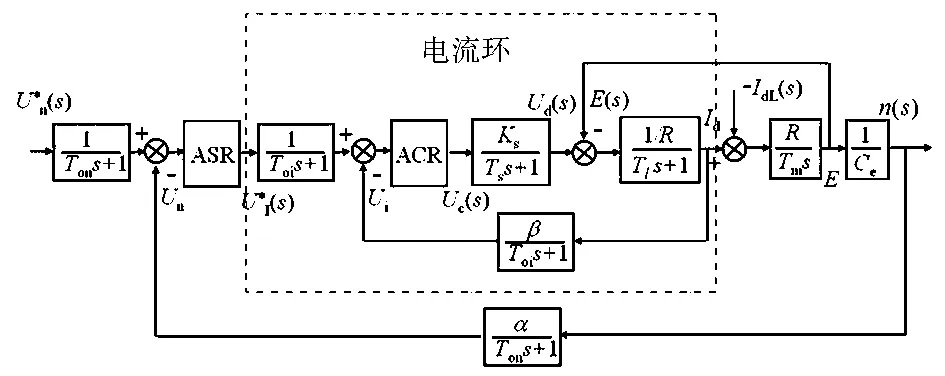
图4 实际使用的双闭环直流调速系统的动态结构图
2 双闭环直流调速系统的设计
2.1 设计参数与指标
欲设计一晶闸管供电的双闭环直流调速系统,整流电路采用三相桥式整流电路,基本设计参数:
直流电动机额定参数:Unom=220V,Inom=136A,nnom=1 460r/min,四极,电枢电阻Ra=0.21Ω,飞轮惯量GD2=22.5N·m2,励磁电压Uf=220V,励磁电流If=1.5A,整流器内阻Rrec=0.5Ω,平波电抗器Ld=20mH.
2.2 调节器参数计算
(1) ACR的参数计算
计算电流反馈系数:
计算电机转矩时常:
0.161s
计算电机电磁时常:
0.076s
查表可得整流电路平均失控时间:Ts=0.0017s
由此可以计算出电流环的小时间常数为
T∑i=Ts+Toi=0.0017+0.002=0.0037s
依据设计要求,电流超调量σi≤5%,电流环的设计按照典型Ⅰ型系统进行设计[1,5],ACR选用PI调节器,其传递函数可以表示为
式中:
τi=Tl=0.0076s
(2) ASR的参数计算
计算转速反馈系数:
为了有效的加快转速的调节速度,转速环的设计按照典型Ⅱ系统进行设计,在此选择中频段的宽度h=5,ASR的传递函数可以表示为
式中:
τn=hT∑n=h(2T∑i+Ton)=
5×(2×0.0037+0.001)=0.087s
3 仿真分析
3.1 仿真模型的建立
根据前文构建的转速、电流双闭环调速系统的动态结构图,在MATLAB/Simulink中选择相应元器件的仿真模块,并将其连接,便可得到按照传递函数构建的双闭环直流调速系统的仿真模型[6],如图5(a)所示.仿真模块的各环节参数在图中进行了标注,按照设计要求,调节器的积分环节的限幅值取为±12,调节器的输出限幅值取为±10.
3.2 双闭环直流调速系统起动过程仿真分析
双闭环的设计能使双闭环直流调速系统获得接近于理想的起动过程,所以在此我们借助于仿真结果着重分析一下双闭环系统的起动过程.
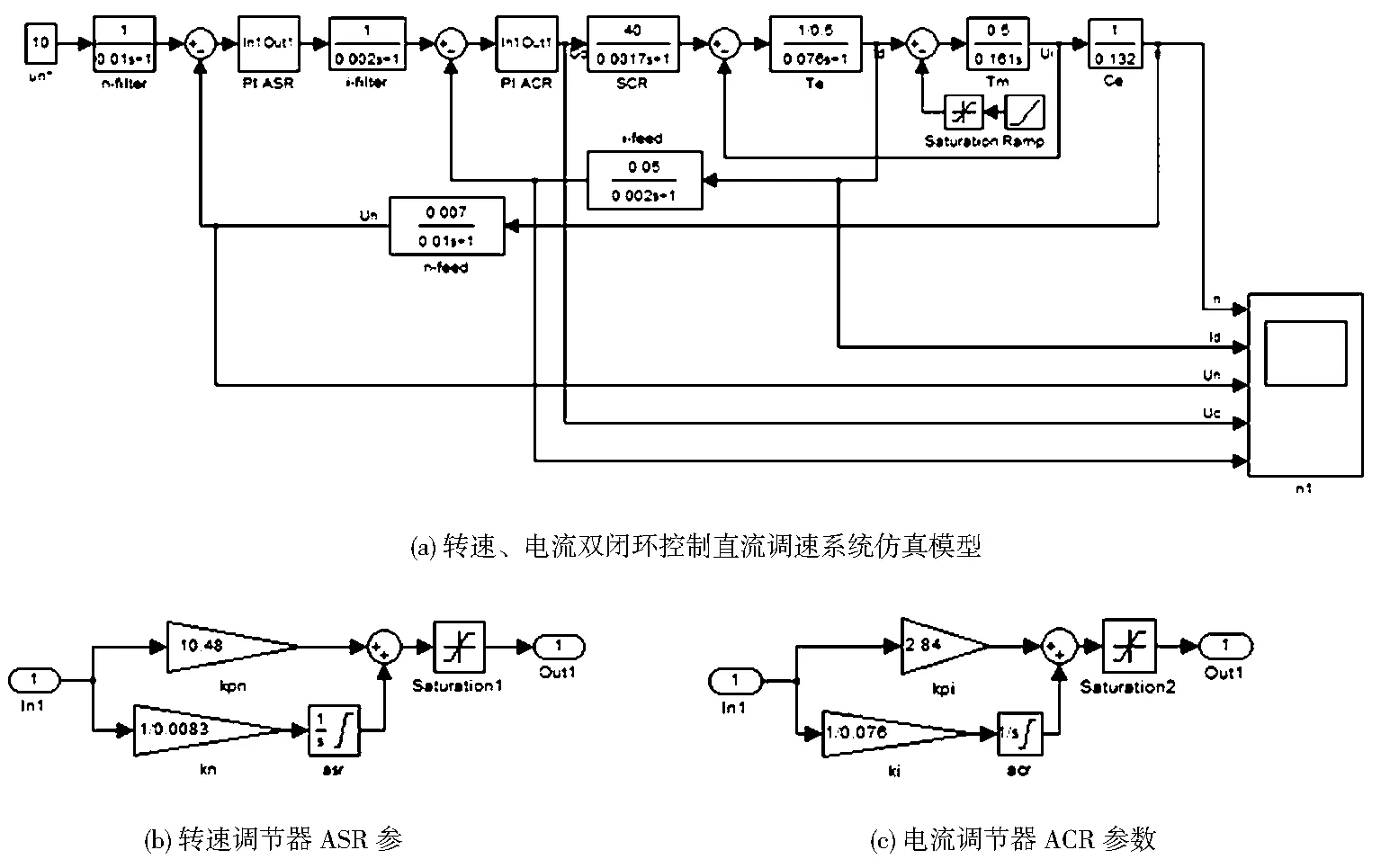
图5 仿真模型和参数
(1) 第Ⅰ阶段(0~t1时刻):称之为电流上升阶段.

图6 转速、电流、反馈电压、反馈电流、电枢电流的瞬态过程仿真图
(2) 第Ⅱ阶段(t1~t2时刻):称之为恒流升速阶段.

(3) 第Ⅲ阶段(t2时刻以后):称之为转速调节阶段.
4 结束语
本文设计了一个转速、电流双闭环直流调速系统,并建立了仿真模型.在该系统中,ASR和ACR都采用PI调节器,而且都带有限幅作用,可以实现无静差.仿真结果表明,设计的双闭环系统的起动过程和教材中的理论分析结果是一致的,起动过程能够实现三阶段的调节作用,即电流上升、恒流升速和转速调节,仿真模型是可行的、合理的.
[1]陈伯时.电力拖动自动控制系统——运动控制系统[M].第3版.北京:机械工业出版社, 2012.
[2]尚丽,崔鸣,陈杰. Matlab/Simulink仿真技术在双闭环直流调速实验教学中的应用[J]. 实验室研究与探索, 2011, 30(1):181-185.
[3]董德智,孙驯洲. MATLAB在双闭环直流调速控制系统教学中的应用[J].自动化与仪器仪表, 2007(4):40-43.
[4]邵雪卷,张井岗,赵志诚.双闭环直流调速系统的饱和限幅问题[J]. 电气电子教学学报, 2009, 31(1): 33-36.
[5]李宁,陈桂.运动控制系统[M].北京:高等教育出版社, 2008.
[6]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社, 2010.
