时滞动力吸振器抑制扭转系统的振动*
2013-09-17赵艳影李昌爱
赵艳影 李昌爱
(南昌航空大学飞行器工程学院,南昌 330063)
时滞动力吸振器抑制扭转系统的振动*
赵艳影†李昌爱
(南昌航空大学飞行器工程学院,南昌 330063)
本文研究了采用时滞动力吸振器抑制扭转振动系统的振动问题.采用稳定性切换方法分析了时滞动力吸振器及其扭转振动系统的稳定性问题,分别得到了时滞动力吸振器和扭转振动系统的时滞稳定和不稳定区域.结果表明,当时滞调节到动力吸振器的临界稳定值时,主振动系统的振动可以完全消除.当时滞在小于时滞动力吸振器的临界稳定范围进行调节时,可以将主振动系统的振动部分消除;并且时滞越大时滞动力吸振器的减振能力越强.当时滞调节超过扭转振动系统的临界稳定值时,系统处于不稳定状态,将导致结构破坏.数值模拟也证实了解析结果的正确性.
扭转振动, 时滞动力吸振器, 稳定性切换, 反馈控制
引言
轴系在柴油机、螺旋桨等周期性的激振力矩的作用下会产生扭转振动.轴系的扭转振动会使得轴系零件磨损加剧、噪声剧增,甚至会导致断轴等事故,直接影响内燃机的使用寿命、工作效率和周围环境[1,2].因此,抑制轴系的扭转振动也成为工程技术人员迫切需要解决的问题.抑制扭转振动的方法很多,由于设计简单和实用性强,采用动力吸振器引起工程界和学术界的众多研究者的关注.Muneharu等[3]研究了采用动力吸振器来抑制一个强迫扭转振动系统的振动问题,发现动力吸振器的质量越小,刚度越大对主系统的减振效果越好.Kim等[4]研究了非线性冲击阻尼对带有间隙的扭转振动系统的频率响应特性的影响,研究发现冲击阻尼降低了共振峰值,增强了动力系统的稳定性,减小了准周期和混沌运动的区域.El-Bassiouny等[5]研究了采用动力吸振器控制非线性强迫扭转振动系统的振动和混沌运动的问题.Al-Bedoor等[6]研究了采用可调动力吸振器来抑制扭转系统的振动问题,研究表明可调动力吸振器可以很好的抑制扭转振动系统设备启动阶段的瞬态振动.Lee等[7]研究了采用次谐波吸振器来抑制旋转机械的扭转振动问题,当吸振器的固有频率调节到外激振扭矩谐波频率的一半时,能够起到很好的抑制扭转振动系统振动的作用.Chao等[8]研究了采用多个次谐波吸振器来抑制旋转机械的扭转振动问题,考虑到外激振扭矩谐波频率的变化和不确定性,文章采用了多个次谐波吸振器来抑制系统的扭转振动,具有很好的鲁棒性.
时滞减振是一种新兴的主动减振技术,美国学者Olgac[9]最早提出时滞减振技术,在主振动系统中引进一个带有时滞状态反馈的动力吸振器,通过调节动力吸振器的反馈增益系数和时滞量来达到减小主系统振动的目的.Olgac等经过大量的理论和实验研究取得了时滞减振技术的理论依据和实验结果.在扭转振动系统方面,Hosek等[10]研究了采用离心摆式的时滞共振器来抑制扭转系统的振动问题,研究结果表明,通过调节反馈增益系数和时滞量可以很好的抑制主振动系统的扭转振动.作者近年来的研究也证实了时滞减振技术在抑制系统振动方面的优越性.本文采用时滞动力吸振器来抑制扭转振动系统的振动,通过调节反馈增益系数和时滞量达到抑制主系统扭转振动的目的.
1 力学模型
采用动力吸振器来抑制线性强迫扭转振动系统的集中质量模型如图1所示.
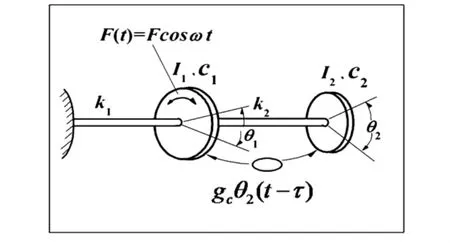
图1 时滞动力吸振器抑制扭转振动系统Fig.1 A model describing the vibration suppression of torsional vibrating system with delayed vibration absorber
图1所示振动系统的运动微分方程为:
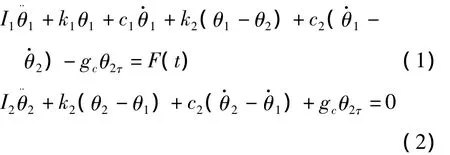
其中,I1和I2分别是主系统和吸振器的质量惯性矩;θ1和θ2分别是主系统和吸振器系统的扭转角位移.k1和k2是主系统和吸振器系统的线性弹簧的刚度系数;c1和c2是主系统和吸振器的线性阻尼系数,gcθ2τ是带有时滞的反馈控制项,其中gc是反馈增益系数,τ是时滞,且 θ2τ=θ2(t-τ).
在有一定物理意义的前提下选择时滞动力吸振器及主系统的参数如下:I1=0.04(kgm2),I2=0.04(kgm2),k1=1.00(Nm/rad),k2=3.00(Nm/rad),c1=0.20(Nms/rad),c2=0.20(Nms/rad).以检测到的外激励频率Ω=15.70(rad/s)为例进行分析.
2 时滞动力吸振器的稳定性分析
由于时滞常常是导致实际系统控制性能恶化和不稳定的重要原因,因此必须要研究时滞系统的稳定性.首先,研究时滞动力吸振器的稳定性.图1所示的减振系统中的时滞动力吸振器的运动方程为:

时滞动力吸振器的特征方程为:

特征方程(4)在纯虚根S=±ωci(其中ωc为时滞动力吸振器的固有频率)处的反馈增益系数和时滞的表达式为:



首先,找到时滞动力吸振器可能的振动频率和可能的时滞的临界值.假设时滞动力吸振器可能的振动频率为 ωj≥0(j=1,2),将S= ± ωji这对纯虚根带入特征方程(4),得到

求得方程(7)的解为

其次,是检验特征根随着时滞变化的趋势.通过计算符号函数

得到,记为 sgn[Sj].如果 sgn[Sj]=+1,说明随着时滞τ的增大,当时滞τ经过临界时滞时,特征根S=±ωji从稳定的左侧平面穿过虚轴进入到不稳定的右侧平面,这样的变化使得不稳定根(即特征根的实部是正数的根)的个数增加两个.反之,如果sgn[Sj]=-1,则不稳定根的个数减小两个.
将系统物理参数带入到方程(5),计算得到时滞动力吸振器发生共振时(即,ωc=Ω=15.70(rad/s)),其反馈增益系数应调节为gc=7.76(Nm/rad);由方程(9)中计算得到吸振器可能的振动频率只有一个 ω1=15.70rad/s,记为S1= ±15.70i;由公式(10)计算得到符号函数sgn[S1]=+1.当τ=0时,由特征方程(4)计算出时滞动力吸振器的两个特征根均是稳定的.由方程(8)计算出时滞动力吸振器的稳定性区域图表如表1所示:

表1 时滞动力吸振器稳定性区域图表Table 1 Stability chart of delayed vibration absorber
由表1可判定,当时滞在 τ∈[0,0.03)范围变化时,时滞动力吸振器处于稳定状态=0.03s是一个临界值.随着时滞的不断增大,不稳定根的个数不断增大,因此不可能再出现时滞的稳定区域.
3 时滞减振系统的稳定性分析
为了保证时滞动力吸振器稳定工作时整个减振系统是稳定的,因此有必要研究整个系统的稳定性问题.
对应减振系统的运动方程(1)和(2)的特征方程为:

下面采用稳定性切换方法来研究整个减振系统的稳定性,其过程与研究时滞动力吸振器的稳定性相似.
为了找到减振系统可能的振动频率和可能的时滞的临界值,假设 ωj≥0(j=1,2,3,4)是特征方程(11)的纯虚根,将S=±ωji带入方程(11)可得到

将系统物理参数带入到方程(12),计算得到整个减振系统可能的振动频率只有一个ω1=11.37rad/s,记为S1= ±11.37i;由公式(10)计算得到符号函数sgn[S1]=+1.当τ=0时,由特征方程(11)计算出整个减振系统的所有的特征根均是稳定的.进而由方程(13)计算出整个减振系统的稳定性区域图表如表2所示:

表2 整个减振系统的稳定性区域图表Table 2 Stability chart of combined system
由表2可判定,当时滞在 τ∈[0,0.10)范围变化时,时滞动力吸振器处于稳定状态,τ1,0=0.10s是一个临界值.随着时滞的不断增大,不稳定根的个数不断增大,因此不可能再出现时滞的稳定区域.
由于< τ1,0,即整个时滞减振系统的稳定性区域比时滞动力吸振器的稳定性区域范围大.因此,当时滞动力吸振器调节到其临界稳定值时(gc=7.76(Nm/rad),τ=0.03(s)),可以将主系统的振动全部消除,并且能够保证整个减振系统是在稳定的状态下工作.
4 数值模拟
为了从数值上验证以上解析结果的正确性,图2-图7给出了系统在不同反馈增益系数和时滞的条件下的时间历程响应曲线,其中(a)表示主系统,(b)表示减振器.图中外激励为F(t)=0.10cos(15.70t)(Nm),初始条件为:θ1(0)=θ2(0)=0.00(rad),(0)=(0)=0.01(rad/s),当t∈[-τ,0)时 θ1(t)=θ2(t)=0.00(rad)(t)=(t)=0.00(rad/s).
图2是没有反馈时的减振系统的时间历程响应曲线,对应吸振器的物理参数是不可调节的,相当于被动吸振器.此时主系统扭转振动的振幅为0.009rad,吸振器扭转振动的振幅为0.005rad.图3对应的是减振系统存在反馈控制,但是反馈控制不存在时间滞后.从图3可以看出,通过引进反馈控制主系统扭转振动的振幅由0.009rad减小到0.004rad,吸振器扭转振动的振幅则增大到 0.006rad,表明通过引进反馈控制提高了系统的减振性能,从而也证明了主动控制比被动控制具有更好的控制效果.

图2 减振系统的时间历程数值模拟图(gc=0.00Nm,τ=0.00s)Fig.2 Time history response curve of the vibrating system where gc=0.00Nm,τ =0.00s

图3 减振系统的时间历程数值模拟图(gc=7.76Nm,τ=0.00s)Fig.3 Time history response curve of the vibrating system where gc=7.76Nm,τ =0.00s
图4-图7是存在时滞反馈控制时减振系统的时间历程响应曲线.对比图3-图5,当时滞由τ=0.00s增大到τ=0.01s时,主系统扭转振动的振幅由0.004rad减小到0.002rad,吸振器扭转振动的振幅则由0.006rad增大到0.008rad.继续增大时滞量,当τ=0.03s时,主系统扭转振动的振幅减小为 0,吸振器扭转振动的振幅则增大为 0.010rad.τ=0.03s是时滞动力吸振器的临界稳定值,此时时滞动力吸振器发生共振,外激励输入到主系统的能量全部被时滞动力吸振器吸收,主系统则不振动.

图4 减振系统的时间历程数值模拟图(gc=7.76Nm,τ=0.01s)Fig.4 Time history response curve of the vibrating system where gc=7.76Nm,τ =0.01s

图5 减振系统的时间历程数值模拟图(gc=7.76Nm,τ=0.03s)Fig.5 Time history response curve of the vibrating system where gc=7.76Nm,τ =0.03s

图6 减振系统的时间历程数值模拟图(gc=7.76Nm,τ=0.05s)Fig.6 Time history response curve of the vibrating system where gc=7.76Nm,τ =0.05s

图7 减振系统的时间历程数值模拟图(gc=7.76Nm,τ=0.15s)Fig.7 Time history response curve of the vibrating system where gc=7.76Nm,τ =0.15s
当时滞量达到时滞动力吸振器的临界稳定值再继续增大,以图6中时滞τ=0.05s为例,主系统扭转振动的振幅又开始继续增大,并且随着时滞量的不断增大,时滞动力吸振器逐渐丧失了减振的能力,导致主系统扭转振动的振幅不断增大.当时滞量超过了整个减振系统的临界稳定值(τ=0.10s)时,以图7中时滞τ=0.15s为例,此时整个减振系统失去了稳定性,可能导致结构破坏.
以上的分析表明,时滞量应该在时滞动力吸振器和整个减振系统都稳定的前提下进行选择.当时滞量在小于时滞动力吸振器的临界稳定值范围选择时,时滞动力吸振器起到了减振作用,减小了主系统扭转振动的振幅.时滞量选择的最佳值是时滞动力吸振器的临界稳定值,此时时滞动力吸振器发生共振,能够完全消除主系统的振动.值得注意的是,时滞量的选择一定不能超过整个减振系统的临界稳定值,一旦时滞超过了整个减振系统的临界稳定值,则会导致整个减振系统的破坏,造成严重的后果.
5 结论
文章主要研究了采用时滞动力吸振器来控制扭转振动系统的振动问题.采用稳定性切换的方法讨论了稳定性问题,得到的主要结论如下:
(1)时滞动力吸振器的稳定范围比整个减振系统的稳定范围要大,时滞量要在整个减振系统的稳定范围进行调节,才能保证减振系统的稳定性.
(2)当时滞量在小于时滞动力吸振器临界稳定值的范围进行调节时,时滞动力吸振器起到减振的作用,能够部分消除主系统的振动.
(3)当时滞量调节到时滞动力吸振器的临界稳定值时,时滞动力吸振器发生共振,将外激励输入到系统的能量全部吸收,能够完全消除主系统的振动.
(4)当时滞量超过了整个减振系统的临界稳定值时,减振系统失去稳定性,将导致整个结构的破坏.
1 孙启国,狄杰建.内燃机曲轴扭转振动的优化动力修改.车用发动机,2010,(5):32~34(Sun Q J,Di J J.Optimal dynamical modification of ICE crankshaft torsional vibration.Vehicle Engine,2010,(5):32 ~ 34(in Chinese))
2 于学华,张家栋.发动机曲轴系统扭转振动分析.噪声与振动控制,2008,(4):60~64(Yu X H,Zhang J D.Analysis of torsional vibration in a crankshaft system.Noise and Vibration Control,2008,(4):60 ~64(in Chinese))
3 Muneharu S,Nobuo T,Dong H N.Torsional vibration suppression by wave-absorption control with imaginary system.Journal of Sound and Vibration,2004,270:657~672
4 Kim T C,Rook T E,Singh R.Effect of nonlinear impact damping on the frequency response of a torsional system with clearance.Journal of Sound and Vibration,2005,281:995~1021
5 El-Bassiouny A F.Vibration and chaos control of non-linear torsional vibrating systems.Physica A,2006,366:167~186
6 Al-Bedoor,Moustafa K A,Al-Hussain K M.Dual dynamic absorber for the torsional vibrations of synchronous motordriven compressors.Journal of Sound and Vibration,1999,220(4):729~748
7 Lee C T,Shaw S W,Coppola V T.A subharmonic vibration absorber for rotating machinery.ASME Journal of Vibration and Acoustics,1997,119:590~595
8 Chao C P,Shaw S W.The dynamic response of multiple pairs of subharmonic torsional vibration absorbers.Journal of Sound and Vibration,2000,231(2):411~431
9 OLgac N,Holm-Hansen B T.A novel active vibration absorption technique:delayed resonator.Journal of Sound and Vibration,1996,176(1):93~104
10 Hosek M,Elmali H,Olgac N.A tunable torsional vibration absorber:the centrifugal delayed resonator.Journal of Sound and Vibration,1997,205(2):151~165
*The project supported by the National Natural Science Foundation of China(10802035)
† Corresponding author E-mail:yanyingzhao@163.com
VIBRATION SUPPRESSION OF TORSIONAL VIBRATION SYSTEM BY USING THE DELAYED VIBRATION ABSORBER*
Zhao Yanying†Li Changai
(School of Aircraft Engineering,Nanchang Hangkong University,Jiangxi330063,China)
The vibration suppression of torsional vibrating system is investigated by using the delayed vibration absorber.The stability switch method was applied to analyze the stability of the delayed vibration absorber and the combined system,and their stable and unstable regions were obtained respectively.The results show that the vibration of the primary system could be suppressed absolutely when the delay is chosen as the critical stable value of the delayed vibration absorber.The vibration of the primary system could be suppressed partly when the delay is chosen in the stable region of the delayed vibration absorber.As the value of the delay increases,the vibration suppression ability is improved.If the value of the delay is larger than the critical value of the combined system,the structure of the combined system could be destroyed.The analytical results agree with the numerical simulation well.
torsional vibration, delayed vibration absorber, stability switch, feedback control
12 April 2012,
12 June 2012.
10.6052/1672-6553-2013-006
2012-04-12 收到第 1 稿,2012-06-12 收到修改稿.
*国家自然科学基金资助项目(10802035)
E-mail:yanyingzhao@163.com
