运载火箭飞行减载控制技术
2013-08-16宋征宇
宋征宇
北京航天自动控制研究所,北京 100854
运载火箭飞行减载控制技术
宋征宇
北京航天自动控制研究所,北京 100854
减载的目的是通过减小气流攻角,降低作用在箭体上的气动载荷,从而提高结构强度的可靠性,也有降低结构重量、提高运载能力的效果。在各种减载技术中,被动的弹道修正法被普遍应用于运载火箭,但设计人员一直在寻求主动的减载技术,通过对横法向过载的直接控制,或估算出气流攻角进行控制,以提高火箭的适应能力。本文结合已有的测量数据,对上述各种技术的原理以及效果进行分析。可以预见的是,随着参数精度的提高带动主动减载技术的应用,将能进一步提升长征系列运载火箭的竞争力。 关键词 运载火箭;减载控制;弹道修正;攻角;自抗扰技术
1 概述
在风作用下,箭体结构需要承受气动载荷与控制力矩相互作用而形成的弯矩,因此强度要加强;而减载控制能够减少箭体结构重量,因而也就提高了其运载能力。
载荷控制的方法可以分为2类:1)射前弹道修正法,该方法适用于风场比较稳定、射前能够得到稳定可靠的风速、风向测量数据的情况,其优点是不增加箭上设备、不影响姿态的稳定性,但需要大量可靠的气象资料和测量数据,实时性不强,对异常风的作用也较为不足;2)另一类是在姿控系统中引入减载控制,通过攻角的信息,或者通过横、法向过载信息进行控制。攻角传感器可以用来直接测量火箭飞行过程中的合成攻角,但考虑到测量精度以及安装和使用问题,在运载火箭上还没有参与实时控制。也可以利用箭上设备实时计算风攻角,采用较多的是利用固连在箭体上的加表来获得测量信息。因此,加表测量信息既可以用来估算攻角,从而参与减载控制,也可以将其过载信号直接参与控制。
本文对目前运载火箭减载技术的研究成果进行总结,并利用飞行遥测数据对方法的有效性进行对比分析。
2 基于弹道修正的被动控制技术
采用弹道修正的目的,是使火箭纵轴和空速矢量(火箭相对大气的速度)一致,即气流攻角为0。这是理想状态,实际情况是尽可能使得气流攻角为最小。当风速矢量给定后,考虑其他约束条件,如弹道倾角等,通过求解弹道运动方程即可求得火箭纵轴的指向。
高空风修正的主要技术手段是预置一个附加气流攻角【1】,一般按照如下方法计算:
在跨音速段和最大动压段,Ws取为设计用的高空风,详细的介绍可参考相关文献。设计用风场是由气动专业根据多年的高空风数据进行统计处理的结果,图1绘制了某型号50m/s和20m/s 两种设计风场以及该型号起飞后半小时实测的风场。
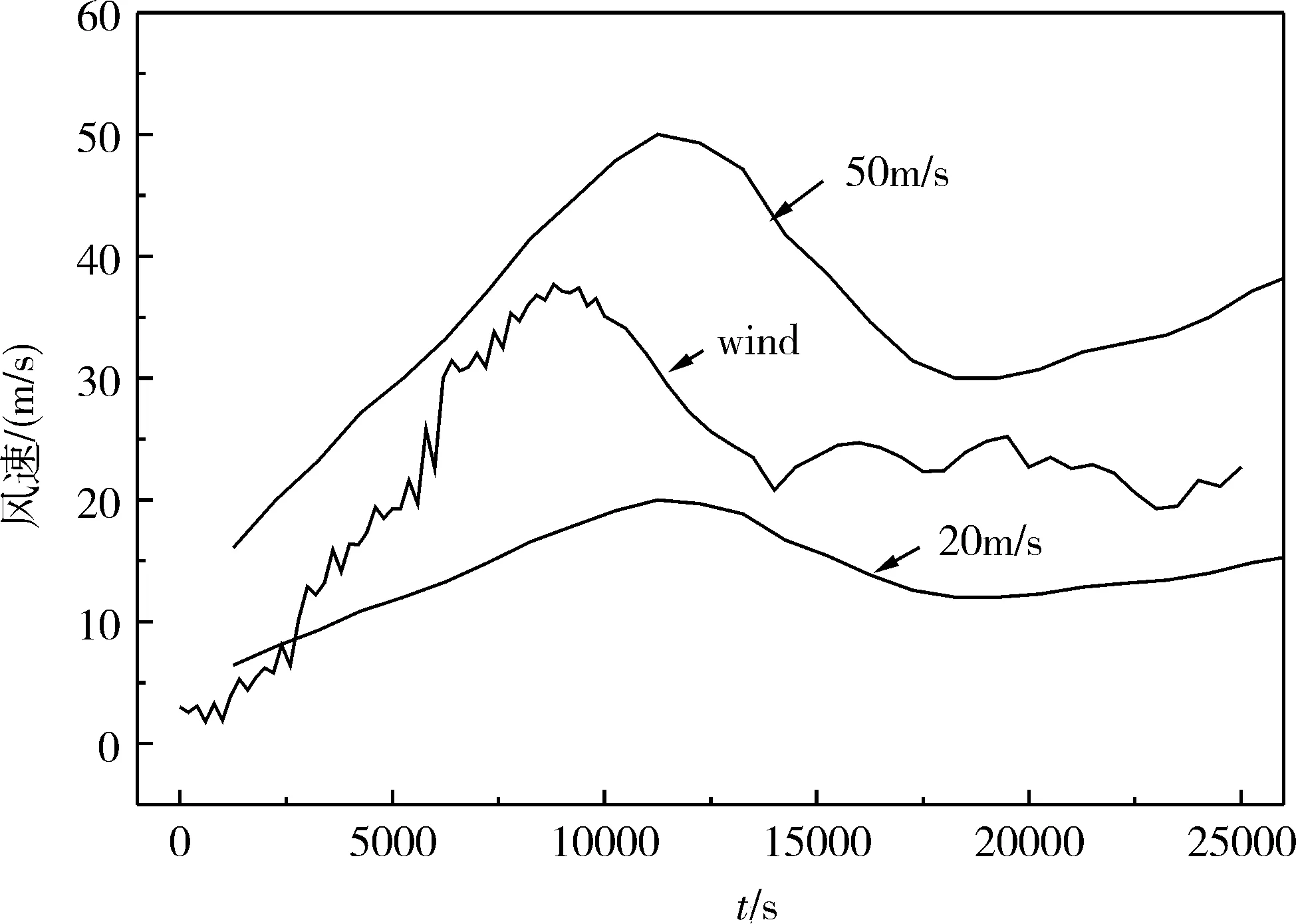
图1 设计风场与实测风场(风速)
此次飞行最终选择了20m/s的风修正弹道。在图2中,标有0m/s,20m/s和50m/s的曲线分别是实际飞行弹道(通过遥测数据得到,下同)与3种设计用风场计算出的q·α值,标有“flight”的曲线是飞行弹道与起飞后半小时测得的风场计算出的结果,q·α值最大不超过1500。如果以不考虑风修正的标准弹道参与飞行,其q·α值最大已超过了2400,风修正的效果显著。
图2 风修正效果示意图
如果认为起飞后半小时测得的风场基本接近实际飞行情况,那么要对高空风进行准确地修正是较为困难的,尤其是考虑到测风误差以及风速会发生变化的情况下,因此弹道修正要尽可能确保在最坏情况下也能满足设计要求。
3 实时减载控制技术
3.1 基于攻角估算的减载技术
如果能够直接估算出攻角,则可以采用类似如下的控制率来进行设计:
(1)
估算风攻角可以利用惯性测量信息和相关总体参数,以采用捷联惯性导航系统为例,惯组中加表的测量值如下:
(2)
秒耗量通过总体参数插值得到。
质心的视加速度可以根据下式计算出:
(3)
式中,Fae为气动相关的作用力,Pt为发动机推力,这些可以从总体参数或插值得到。α为包含风的总的攻角,β为包含风的总的侧滑角。δφ,δψ为发动机摆角,可以由伺服机构的角位移或线位移传感器获得。m为箭体的质量,由箭体总质量和秒耗量计算得到。
式(2)中,角加速度可以由下式计算出:
(4)

将式(3)和(4)代入式(2)可以计算出攻角和侧滑角,以攻角计算为例:
(5)
根据式(5)计算α,由α可以继续估算出风攻角αw,限于篇幅本文不再赘述。
采用以上方法,根据某火箭飞行惯性器件遥测数据计算攻角(Alpha_cal),并将计算结果与箭上攻角传感器测量结果(Alpha_sr)、以及起飞后半小时实测风场数据(Alpha_wm)进行对比,如图3所示,选取了48~80s时段。3种结果不尽相同,相比而言,攻角传感器与测风结果较为接近。
在上述计算过程中,式(4)的许多参数是通过总体参数插值得到的,干扰力矩是通过起飞后进入大风区前某一平稳飞行段内的舵摆角估算的,由于这些参数目前的准确性还不够,使得计算结果的可信度下降,尤其是计算值与攻角测量值还存在极性相反的情况,影响了该方法的应用。
如果避开式(4)计算用到的干扰力矩与转动惯量,则可以提高攻角估算的准确度。例如,利用速率陀螺的信号通过微分来估算角加速度,然后根据下式计算攻角:
(6)
但角速率微分会带来新的误差,为此本文采取了2种处理方法:一种是采用差分求解微分信号,并进行带宽为0.3rad/s的滤波处理,从处理后的角加速度看,其值在0附近正负变化,效果不是很好。于是换用自抗扰技术中“非线性跟踪微分器”来求解,角加速度基本呈单调变化,较为反应实际情况。原有计算值与利用角速率计算出的攻角相比已存在较大差异,显然后者修正了一部分误差,其计算结果见图(3)中Alpha_rg曲线所示。
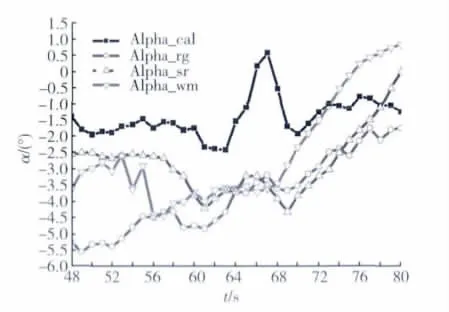
图3 攻角测量与估算结果对比
工程上还有其他减少不确定因素的处理措施,例如,火箭头部和尾部各安装一套加速度表,以攻角计算为例,可得到如下2组方程:
(7)


(9)

(10)
目前还没有火箭采用上述方案,因此难以验证这种结果的准确性。
3.2 采用过载控制的减载技术
本节介绍直接采用过载进行控制的减载技术,该方法的出发点是:如果减少横法向过载,能够起到减少气流攻角的同等效果。考虑箭体的短周期运动方程【2】:
Δφ=Δα
(11)
在不考虑过载控制的情况下,选取的控制律为
(12)
将式(12)代入式(11),得到:
(13)
忽略式(13)的动态项,得到:
要消除气流攻角(Δα+αw),则应设法使Δα去抵消αw。考虑到加速度表所测量的信号为:
(15)
相应的,控制率选取如下:
(16)
将式(15)和(16)代入式(11),忽略动态项后得到:
(17)
3.3 采用自抗扰技术的减载控制研究
将风干扰视作“扰动”,而自抗扰技术的特点是不依赖于对象的精确模型,即不一定需要知道状态函数和状态变量,这恰好适用于风攻角估算不准确的情况,因此在这方面也开展了相关研究。限于篇幅,本文直接采用自抗扰的相关原理【3~4】进行说明。
令
(18)
则箭体的绕心运动可以描述为以下二阶系统:
(19)
根据自抗扰技术,令:
(20)
(21)
为简化计算,采用线性组合的形式引入角加速度反馈设计控制器,即
(22)
其中ν为y的期望值。式(22)采用了线性组合,大量仿真实验表明,采用适当的非线性组合可以得到更好的效果,本文为了对比不同方法的效果,采用了线性的简化处理。
在自抗扰的设计中要设计扩张观测器,并适当选取c1~c3:
(23)

(24)
但是如果采用u1进行控制,经过仿真表明效果不是很理想,究其原因,自抗扰并不能区分干扰中由风产生的部分,因此虽然抗干扰能力较强,但减载效果并非很好。此时考虑到引入过载反馈:
(25)
(26)
(27)
对比式(27)与(17),选取不同的参数,其结果略有不同,但没有明显的差距。
4 技术的简要分析
弹道修正技术在运载火箭减载控制中已较为成熟,仍将是目前减载控制的有效手段。但其作用更多地是为了提高飞行可靠性,只有实时主动的减载技术得到成功应用,才能将减载效果转化为运载能力的提高。
采用过载直接进行减载控制的方案是主动减载技术中较早采用、也相对可靠的方案,但由于受到了对系统稳定性的影响,减载的效果在12%左右,很难进一步提高。以某火箭为原型的仿真结果如4所示。
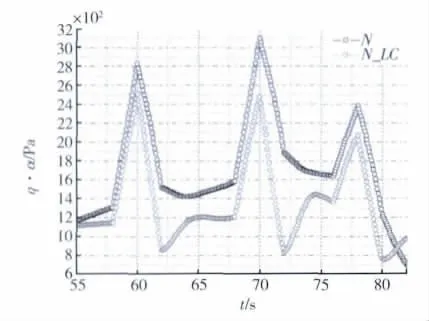
图4 卸载效果示意图
图4中曲线“N”表示额定状态下未采用减载控制方案的q·α值,曲线“N_LC”表示的是减载控制后的效果。需要说明的是,不同风干扰的施加方式对仿真结果有显著影响,工程中对切变风一般采用较为严酷的三角波形式,如图5所示;切变风加入点选为跨音速、b2max、速度头最大时刻,切变风按飞行高度2000米加入。

图5 切变风示意图
自抗扰技术将风干扰视作“扰动”,当只有风干扰这一项干扰时,减少干扰与卸载控制均可以取得较好效果;但若其他干扰与风干扰相比,后者并不占据主要因素时,减载的效果并不理想。这项研究表明,如果能够将其他干扰减小,或者较为准确地估算出其他干扰,或者选取风干扰占主要因素的其他观测量参与自抗扰的设计,则可以提高减载效果。自抗扰设计的另一项效果是,实际飞行中某些干扰可能并不如仿真中那么大,或者当实际高空风与弹道修正用的设计风场有较大差异时,风的作用越显著,自抗扰的效果应越好,可以降低弹道修正的压力。
采用攻角估算参与实时减载控制的技术中,无论是现有攻角传感器的测量值,还是利用惯导信息以及箭体总体参数计算出的攻角,其准确度还有待验证。采用速率陀螺的信号求解角加速度,能够很大程度上消除由干扰力矩和转动惯量带来的误差,但角速率信号微分求解角加速度时,又会引入新的误差。本文采用的“非线性跟踪微分器”具有较强的抗干扰能力,其解算出的角加速度可信度较高。通过对比Alpha_rg与Alpha_sr在飞行程序角变化时相应计算(测量)结果的变化,初步认为Alpha_rg的结果更为接近真实情况;两条曲线在60s之后不但趋势相近,数据也比较吻合。上述差异的原因还有待于进一步分析。但有理由相信,通过合理安排角速率安装位置、提高角速率和发动机摆角测量精度,并采取有效的微分滤波措施,能够准确地计算出角加速度。考虑到推力与秒耗量基本平稳,那么攻角估算的准确度将主要决定于气动力相关参数的准确性。
5 结束语
本文的研究得益于载人航天工程的实践,由于载人运载火箭头部有逃逸塔,有利于攻角传感器的安装;同时提供火箭起飞后半小时的实测风场数据,这为各种数据的对比提供了一定的参考。但不是所有火箭都可以方便地安装攻角传感器,因此攻角估算对提高采用过载控制的减载效果更有意义。随着飞行子样的增加,可以不断修正总体参数和提高攻角计算的准确度。一旦攻角计算的精度满足了实时控制的需要,将不再受到攻角传感器的限制,也不仅局限于对过载的反馈控制,实时减载技术将得到广泛推广,从而提高长征系列运载火箭的竞争力。
[1] 余梦伦.CZ-2E弹道修正[J].导弹与航天运载技术, 2001,(1): 9-15.
[2] 徐延万.控制系统(上)[M].中国宇航出版社, 1989.
[3] 韩京清.自抗扰控制技术[J].前沿科学, 2007,(1): 24-31.
[4] 主动卸载控制技术研究报告[Z].北京航天自动控制研究所,2013.
Load Control Technology in Launch Vehicle
SONG Zhengyu
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Loadcontrolisusedtodecreaseangleofattack,whichcanreduceaerodynamicloading,increasestrengthreliability,cutdownweightsandenhancescarryingcapacity.Amongvariousloadcontroltechnologies,passivetrajectorycorrectioniswidelyusedinlaunchvehicle(LV),butbythecontrolofhorizontalandverticalloadorbythecontrolofestimatedangleofattack,theresearchinactivetechnologyisstillcontinuingtoimprovetheadaptability.Throughtheanalysisofthetelemetrydata,theprincipleandeffectofthesetechnologiesareintroducedinthispaper.Fortheforeseeablefuture,theactiveloadcontroltechnologywhichisdrivenbytheprecisionimprovementinmeasurementandestimationwillfurtherraisethecompetitivenessofLMLVs.
Launchvehicle;Loadcontrol;Trajectorycorrection;Angleofattack;Auto-disturbance-rejectioncontrol
宋征宇(1970-),男,江苏靖江人,国际宇航科学院通讯院士,主要研究方向为运载火箭控制系统设计。
V448.12
A
1006-3242(2013)05-0003-05