星点识别算法中背景阈值的确定方法
2013-08-16罗长洲王胜男赵广州
罗长洲 王胜男 邵 雷 赵广州 王 杰
北京控制与电子技术研究所,北京 100038
星点识别算法中背景阈值的确定方法
罗长洲 王胜男 邵 雷 赵广州 王 杰
北京控制与电子技术研究所,北京 100038

数字星空图像是星敏感器加工处理的对象,其特点与目标和目标所在星空区域、图像传感器的光谱响应特性,以及捕获图像时的工作条件等有关。选择合适的背景阈值,是正确识别星点的基础。在分析总结数字星空图像基本特点的基础上,根据数理统计和误差分析理论,提出一种背景阈值确定方法,又根据星敏感器光电探测过程中的物理模型,提出因果关系法确定背景阈值的技术路线。依据特定方案星敏感器的试验结果表明,采用因果关系法确定的背景阈值,能很好地将数字星空图像中的背景和星点区分开来,确保了系统对目标星点的正确识别,并且具有更好的实时性。 关键词 星敏感器;数字星空图像;点目标;识别;阈值
星敏感器是一种通过测量目标星空图像中特定恒星的像点坐标或视线角,并根据自身的特性参数,精确测量航天器姿态的测量装置。由于天球上的恒星是测量时间和大地方位的原始依据,因此,星敏感器是迄今为止精度最高且漂移最小的航天器姿态测量装置。
星敏感器主要由光学系统、电控系统和支撑这2大系统的结构组成,其中:电控系统主要由图像传感器电路与控制和数据处理电路组成。从原始星空图像中正确识别目标星点并精确定位是星敏感器的一项基础性工作,也是星敏感器工作过程中最费力耗时的部分。目前,国内外大多数星敏感器均采用数字信号处理器运行特定的识别算法来完成目标星点的识别工作。识别算法普遍采用连通域分析法,有些文章也称此方法为聚类分析法。具体过程是:首先选择一个合适的阈值,然后以此为边界,将像元分成背景像元和星点像元2大类,最后根据星点像元之间的空间位置关系,再将它们区分为不同的星点。由此可见,选择合适的背景阈值是实现正确识别星点的基础,文献[1]和[2]对此问题进行了简单说明,但并未给出合理解释,其它文献对此问题则是一带而过,也没有进行详细的说明。
本文在分析研究数字星空图像基本特点的基础上,根据数理统计和误差分析理论,对此问题进行了深入探讨,并依据星敏感器总体技术方案及数字星空图像的捕获过程,提出了确定背景阈值的因果关系法。
1 数字星空图像及其特点
天球上的恒星可以看作是无穷远处、具有一定辐射光谱特性、张角约为1″的点光源。经过图像传感器的空间量化和模数转换器的强度量化而形成的数字星空图像,其基本特征是:在较暗的背景上,分布了有限多个弥散斑,其中弥散斑的尺寸大小,由确保载体姿态测量精度所需的星点定位精度决定,一般通过光学成像系统的离焦来获得,而弥散斑的总灰度值则反映了待识别恒星的亮度信息。
星敏感器捕获的一幅尺寸为200×200像素的数字星空图像星点所在局部区域如图1所示,其三维灰度分布如图2所示。星空图像的基本特点如下:
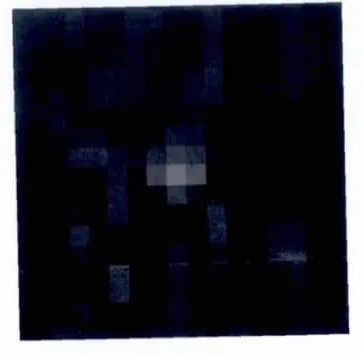
图1 数字星空图像(星点局部)

图2 三维数字星空图像
1)像元的灰度值可能为0,也可能不为0;
2)属于某个星点的像元,其空间位置彼此相邻,分布在一个连续空间区域内,并且灰度值大于一个确定的值;
3)任意一个星点中,有且必有一个以上像元的灰度值大于星点内其它像元的灰度值;
4)图像传感器的哑像元不会影响背景,但会影响星点像元空间上的彼此相邻关系;
5)当光积分时间超过一定数值时,图像传感器的全亮疵点的灰度会超过星点像元的最大灰度值。
要从数字星空图像中识别出目标星点,必须选择合适的背景阈值。若背景阈值选取过高,则会将可能的目标星点判定为背景,从而漏检可能的目标星点,使漏检率过大;若背景阈值选取过低,则会将可能的背景噪声误判为目标星点,从而增加可能目标星点的数量,使虚警率过大。这2种情况均会影响对数字星空图像的正确处理,以及对目标星点的正确识别,从而影响星敏感器的功能和可靠性。
2 背景阈值的确定方法
根据星敏感器图像缓冲器中数字星空图像的数据形式,数学上可以用一个二维数组来表征数字星空图像,数组的元素表征了对应位置像元的灰度值,是一组数值上高度相关的测量数据,与光积分时间内落在其感光面上的模拟光学图像的入射能量、像元自身的暗电流和响应非均匀性、模拟电路噪声、模数转换器电路参数等有关,并且背景像元的个数远大于星点像元的个数。
根据数据统计理论,可以用如下公式定义数字星空图像的背景灰度:
(1)

对于星敏感器的星点识别工作,如果将数字星空图像看作是测量星空背景强度的一组测量数据,那么,其中属于星点像元的灰度值则是这组测量数据中的“粗大误差”,因此,可以用误差理论中的粗大误差判断标准确定数字星空图像背景阈值,这样,若某个像元的灰度小于该阈值,则这个像元为背景像元,否则,该像元为某个可能星点的所属像元。
在误差理论中,判别粗大误差的准则主要有莱以特准则(3σ准则)、罗曼诺夫斯基准则、格罗布斯准则和狄克松准则。所有这些准则都要求已经获得了一组关于待测物理量的测量数据,然后在此基础上对测量结果进行统计运算,逐步剔除其中含有粗大误差的数据,最后获得待测物理量的测量值,因此,按式 (1)计算星空图象的背景阈值,只能在已经获取了数字星空图象后方可进行,不能实时预计数字星空图像的背景阈值,这也就影响了数字星空图像的处理速度,进而影响到星敏感器数据刷新速率的提高。
另外,粗大误差判别准则主要用于剔除有限次测量中获得的含有粗大误差的测量数据。对一般的数字星空图像,其画幅尺寸至少是256×256像素,因此,对于数字星空图像,测量数据的个数一般远大于100。根据格罗曼诺夫斯基准则的粗大误差判别准则,要进行星点识别,亦即剔除测量数据中含有粗大误差的数据,只须取α=2即可,无需像文献[1]和[2]那样取α为 5 或 6 。对于本文所示的数字星空图例,当α=2时,按式 (1) 确定的数字星空图像背景及原始数字星空图像的三维灰度分布如图 3 所示,从图中可以看出,背景阈值已很好地将星空背景和星点区分开来。
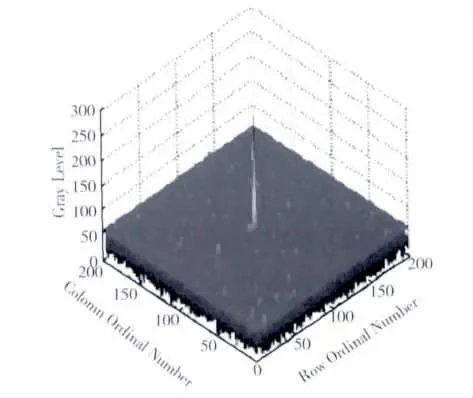
图3 三维数字星空图像及背景阈值平面(统计方法)
按式(1)确定的背景阈值是对整幅数字星空图像的统计结果,必须在获取数字星空图像后进行,并且数据运算量随着画幅尺寸的增加而变大,但无须知道星敏感器获取数字星空图像的工作条件,因此,该方法的实时性较差,只适合于对数字星空图像的事后处理。
然而星敏感器所捕获的数字星空图像,是目标恒星光辐射、目标恒星所在区域背景光强、图像传感器噪声、模拟信号处理电路噪声,以及载体的姿态变化等共同作用的结果,因此,可以采用因果关系法确定当前数字星空图像的背景阈值。其基本思路是:背景灰度为天空背景的亮度与图像传感器暗电流的和,其中天空背景亮度可以是比最暗目标恒星低一个星等的亮度,也可以是10MV星的亮度。因此,星敏感器输出的数字星空图像,其背景阈值为:
(2)
式中:β为模拟信号处理电路的增益系数,单位: 无量纲;SF为模数转换器满量程数值,单位:无量纲;Vref为模数转换器满量程的电压参考范围, 单位:V;Δt为捕获星空图像的光积分时间,单位:s;ΔS为光学系统物镜的面积,单位:m2;μe为光电子电压变换系数,单位为:伏特/电子(V/e-);β(m,c,l)是亮度为m、光谱类型为c、温度等级为l的恒星的光谱辐射密度,单位为:p/m2·s;μ(λ)为图像传感器的光谱响应曲线,单位为: e-/p;nr为图像传感器受光区域像元行数,单位:无量纲;nc为图像传感器受光区域像元列数,单位:无量纲;ndark为单位时间内像元产生的暗电流电子数,单位:e-/s;nktc为像元热噪声产生的电子数,单位:e-。
由于目标特性和图像采集系统工作参数都是已知的,因此,按式 (2) 确定数字星空图像的背景阈值时,不需要事先获取全部数字星空图像数据,而在捕获数字星空图像之前就已经完成了,因此,该方法具有良好的实时性,对提高星敏感器的数据刷新速率是十分有利的。
3 试验及结果分析
为了检验本文提出的数字星空图像背景阈值确定方法,搭建了数字星空图像背景阈值试验系统,试验用单星模拟器模拟产生亮度为0MV的恒星,在不同的工作条件下,用星敏感器模样获取大量的数字星空图像,并对试验捕获的数字星空图像进行了分析和处理。
星模拟器采用白炽灯光作为光源,通过使用不同波长的滤色片后,实现了对星模拟器光谱类型的调整,从而构成不同色温的光谱类型。星模拟器采取了光源亮度自动稳恒技术,对光源的发光强度进行了控制。根据光学试验结果,白炽灯的光子数辐射密度曲线可以用表面温度为2856K绝对黑体的光谱辐射度来描述[3],如图 4 所示,图中曲线下阴影部分的面积表示相应辐射光谱类型、亮度为0MV的恒星单位时间内从单位面积上辐射出的光子数。
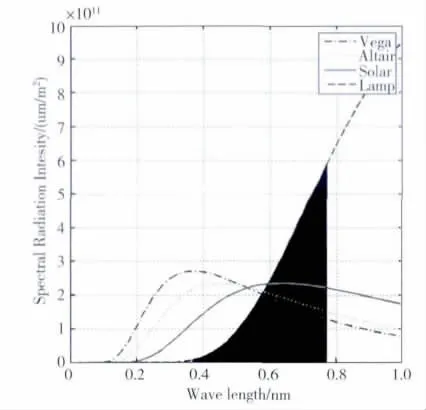
图4 星模拟器光谱辐射曲线(光源为白炽灯)
星敏感器模样电控系统相关电路的基本工作参数是:图像传感器的光谱响应曲线如图5所示,单个像元单位时间内产生的暗电流电子数ndark=3135e/s。模拟信号偏置电平为Vbias=2.0V,输出放大器增益系数动态分级可调,β分别为1.00,2.47,4.59或8.64。模数转换器参考电压:低电平为Vlow=2.0V,高电平为Vhigh=4.7V,转换电压范围为Vref=2.7V,像元灰度数值范围为0~1023(10位精度)。
记录试验获得的每一幅数字星空图像时星敏感器的工作条件,然后用公式计算相应工作条件下星空图像可能的背景灰度值,待星敏感器按相应工作条件捕获了一幅数字星空图像后,再用式(1) 计算图像的背景灰度值,最后对比二者之间的判别。
结果表明:因果关系法确定的数字星空图像背景阈值,与统计法确定的十分相近,二者的偏差很小。按式(2)确定的背景阈值及相应条件下捕获的数字星空图像的三维灰度分布如图 6 所示,从图中可以看出,背景阈值很好地将星空背景和星点区分开来,因此,按式 (2) 确定的数字星空图像背景阈值,可以作为星敏感器进行图像分割,从而成为识别目标星点的依据。
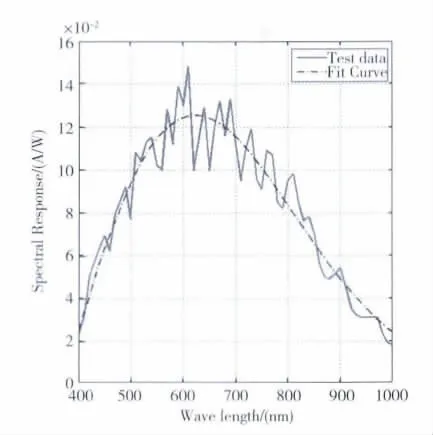
图5 图像传感器光谱响应曲线
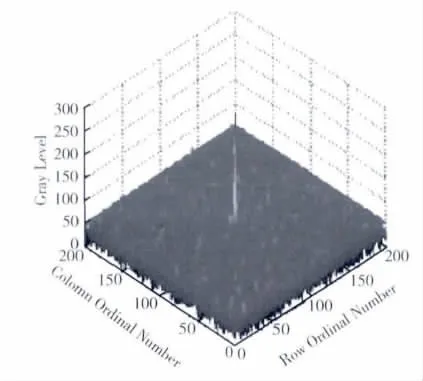
图6 三维数字星空图像及背景阈值平面(本文方法)
4 结论
根据天球上恒星目标及其所在天空区域光辐射特点,以及星敏感器捕获数字星空图像的物理过程,分析并总结了数字星空图像的基本特点,研究了基于误差理论和数据处理原理的背景阈值确定方法,提出了一种基于因果关系的背景阈值确定方法,该方法既考虑了恒星目标及其所在天空区域的光环境特点,也考虑了星敏感器电控系统电路参数。通过对星敏感器模样相关试验数据的处理和分析表明:由此方法确定的背景阈值与统计方法确定的基本一致,并且由于该方法不需要星敏感器事先捕获数字星空图像,而因果法确定背景阈值具有更好的实时性,可缩短星敏感器处理数字星空图像的时间,有利于提高星敏感器测试载体姿态的速度。
[1] 姚大雷,汶德胜.适用于星敏感器的星体识别研究[J].长春理工大学学报(自然科学版),2008,31(1):71~73,84. (YAO Dalei,WEN Desheng.Study on Star Identification of Star Image for Star Sensor[J].Journal of Changchun University of Science and Technology (Natural Science Edition),2008,31(1):71~73,84.)
[2] 费业泰.误差理论与数据处理[M].机械工业出版社,2005.(FEI Yetai.Theory of Error and Data Process[M].Mechanics Industry Press,2005.)
[3] 李学夔,郝志航,李杰.星敏感器的星点定位方法研究
[J].电子器件,2004,27(4):571~574.(LI Xuekui, HAO Zhihang, LI Jie.The Research on the Method of the Stars Position Determination of the Star Sensor[J].Chinese Journal of Electron Device,2004,27(4): 571~574.)
[4] 李德良,阮锦.一种适用于星敏感器的星点提取方法[J].激光与红外,2009, 39(12): 1348~1350.(LI De liang, Ruan Jin.Method Adapting to the Atar Sensor’s Star Extraction [J].Laser & Infrared,2009,39(12):1348~1350.)
[5] 王洪涛,罗长洲,王渝.基于背景自适应预测的星点提取算法[J].光学技术,2009,35(3):412~414,418.)(WANG Hongtao, LUO Changzhou,Wang Yu.Algorithm for Star Extraction Based on Self-adaptive Background Prediction[J].Optical Technique,2009,35(3):412~414, 418.)
[6] 江洁,张广军,李霄.一种快速的星敏感器星跟踪方法研究[J].航空学报,2006,27(5):913~916.(JIANG Jie, ZHANG Guangjun, LI Xiao.A Fast Star Tracking Algorithm for Star Sensor[J].Acta Aeronautica et Astronautica Sinica,2006,27(5):913~916.)
[7] 李玉峰,李广泽.一种快速的星敏感器星点提取算法[C].2007 年仪表,自动化及先进集成技术大会论文集(二),2007,28(X):405~408.(LI Yufeng,LI Guangze.Rapid Star Extraction Method for Star Sensor[C].Thesis of 2007’ General Meeting of Instrument, Automation and Advanced Integration,2007,28(X):405~408.)
[8] 田金文,欧阳桦,郑胜.一种星图中星的提取方法[J].华中科技大学学报(自然科学版),2005,33(4):38~40. (TIAN Jinwen,OU yanghua, ZHENG Sheng.Method of Star Acquisition from Star Image [J]. Huazhong University. of Science. & Techology. (Nature Science Edition),2005,33(4):38~40.)
[9] 史斯,伍锁,译.无线电公司编[美].电光学手册[M].国防工业出版社,1978. (SHI Si,WU Suo.Radio Corporation of America Electroc-Optics Handbook[M].Mechanics Industry Press,1978.)
The Method of Deciding Background Threshold in Star Dot Recognition Algorithm
LUO Changzhou WANG Shengnan SHAO Lei ZHAO Guangzhou WANG Jie
Beijing Institute of Control & Electronics Technology, Beijing 100038,China
Thedigitalstarimageistheobjectofstarsensorprocessing,anditscharacteristicsaredecidedbythetargetstar,theareaaroundthetargetstar,thespectralresponseofimagesensorandtheworkconditionofthespecialstarsensor.Theappropriatebackgroundthresholdisthebasistorecognizethestardotscorrectly.Accordingtothetheoryofstatisticsanderroranalysis,thecharacteristicofdigitalstarimageisanalyzedandanewmethodonbackgroundthresholdisproposed,whichisbasedoncausality.Theexperimentationisdonetothespecialstarsensor,andtheresultshowsthatthestardotshavebeendifferedfromthebackgroundinadigitalstarimage.Thisensuresthatthestarsensorcanrecognizethestardotscorrectlyandcanworkinrealtime.
Starsensor;Digitalskyimage;Dotobject;Recognition;Threshold
2012-12-11
罗长洲(1967- ),男,徐州人,博士,研究员,硕士生导师,主要从事星光惯性复合制导自动探测装置技术研究;王胜男(1987-),女,山东人,硕士研究生,主要从事导航、制导与控制及自动化检测相关技术研究;邵 雷(1982-),男,北京人,本科,工程师,主要从事星敏感器相关理论研究与应用;赵广州(1972-),男,湖北人,博士后,高级工程师,主要从事模式识别与图像处理技术研究;王 杰(1986-),男,山西人,硕士,设计师,主要从事星光惯性复合制导技术研究。
TP752.1
A
1006-3242(2013)05-0050-05