一种基于紫外姿态敏感器和星间相对测量的星座组合导航方法*
2013-08-16魏春岭
王 裙 熊 凯 张 斌 魏春岭
1.北京控制工程研究所,北京 100190 2.空间智能控制技术重点实验室,北京 100190
一种基于紫外姿态敏感器和星间相对测量的星座组合导航方法*
王 裙1,2熊 凯1,2张 斌1,2魏春岭1,2
1.北京控制工程研究所,北京 100190 2.空间智能控制技术重点实验室,北京 100190

提出基于紫外姿态敏感器和星间相对测量的星座组合导航方法。采用扩展卡尔曼滤波算法来对观测数据进行融合,实现对星座中各颗卫星的位置矢量和速度矢量的精确估计。以低轨区域星座为例,基于Cramer-Rao下界分析组合导航系统的性能,并通过数学仿真验证了所提方法的有效性。 关键词 组合导航;紫外姿态敏感器;星间相对测量;区域星座;Cramer-Rao下界
实现星座卫星自主导航,有助于降低多颗卫星对地面系统的依赖程度和减轻地面测控系统的工作量。各类单颗卫星自主导航方法在一定程度上可以实现某类卫星的自主导航,但单纯采用单星自主导航方法忽略了星座中星间相对运动的规律,不能满足星座长期稳定且高精度的自主导航要求。虽然利用星间链路伪距测量进行星座卫星自主导航逐渐成为研究的热点,但该方法进行星座卫星自主导航时存在亏秩问题,即星座的整体漂移无法确定,造成星座卫星的绝对定位误差随时间增长而逐步积累[1]。美国GPS Block IIR卫星就是利用星间伪距观测量进行星座自主导航的,其解决导航星座整体漂移问题采用的方法是预报星座轨道方向根数来约束其过快增长。但对于低轨道星座,由于大气阻力等因素的影响,轨道的长期预报精度有限。另一种解决亏秩的方法是利用惯性坐标系中的星间相对位置矢量测量同时自主确定2个航天器轨道的方法[1]。文献[2]对该方法进行了深入研究。陈金平等人[3]也在星间距离测量的基础上利用星敏感器进行卫星之间的方向观测。
本文以一个由3颗卫星组成的低轨区域星座为例,工作模式为组网工作,分为1颗主星和2颗副星,2颗副星在同一个轨道面上。主星和副星间有星间链路,可以提供伪距测量。首先提出基于“紫外姿态敏感器+星间伪距测量”的星座自主导航方法,通过引入紫外姿态敏感器的测量信息有助于解决仅依赖星间伪距观测量进行定位时存在的亏秩问题。但考虑到紫外姿态敏感器的测量精度较低,而星间链路伪距测量精度较高,这2种观测量的精度不匹配,难以满足星座卫星高精度自主导航的要求。为了解决这一问题,引入星间方向测量信息,提出基于“紫外姿态敏感器+星间相对测量”的星座组合导航方法,实现星座卫星高精度自主导航。基于Cramer-Rao下界分析了2种导航方法的性能,并通过数学仿真验证了组合导航方法的有效性。
1 基于“紫外姿态敏感器+星间伪距测量”的星座自主导航
紫外姿态敏感器具有新颖的光机电一体化结构,只用一个固态敏感器组件就能同时敏感恒星和地球辐射,可同时提供三轴姿态数据和自主导航信息。地球边缘在红外和可见光波段存在较大波动,而地球在白天和夜间均存在适宜探测的稳定的紫外临边辐射特征,能够为紫外姿态敏感器精确测量地心矢量和地球视半径提供信号基础[4-5]。
在参与导航的3颗卫星上分别配置紫外姿态敏感器,通过紫外姿态敏感器可获得地心方向矢量和地球视半径观测量,通过星间链路可获得星间伪距观测量。并通过上述观测量确定星座卫星的位置和速度。通过引入紫外姿态敏感器的测量信息有助于解决仅依赖星间伪距观测量进行定位时存在的亏秩问题。
1.1 滤波状态方程
状态变量选为参与导航卫星的位置矢量和速度矢量在惯性坐标系中的3个分量[6],

(1)
其中,下标i=0,1,2分别代表星座中的主星0、副星1和副星2。
每颗卫星的轨道动力学模型可由如下微分方程描述:
其中,t表示时间,wi(t)为系统噪声,用来描述各摄动项的建模误差,其统计特性为
卫星轨道动力学模型中除中心引力外,仅考虑J2项摄动,f(xi(t),t)分量形式为
f(xi(t),t)=

1.2 测量方程
观测量为参与导航的卫星的地心方向矢量、地球视半径以及主星和副星间的星间链路伪距,离散形式的观测方程可简写为
(5)
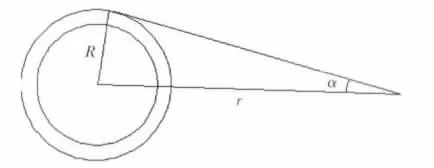
图1 地球视半径α
星之间的距离。R有2个部分:地球半径RE和地球紫外辐射层高度Huv,即R=RE+Huv。vk表示测量噪声,与系统状态x(t)和系统噪声w(t)无关且均值和方差为
(6)
观测量对状态向量的偏导数矩阵为
其中,
(8)
(9)
(10)
(11)
1.3 滤波算法

状态转移矩阵Φk,k-1近似计算为
(12)
式中,
(13)
估计误差协方差阵的时间更新公式为
(14)
测量更新公式为

滤波增益矩阵为
(17)
2 基于“紫外姿态敏感器+星间相对测量”的星座自主导航
考虑到紫外姿态敏感器的测量精度与星间链路伪距测量精度不匹配,难以满足星座卫星高精度自主导航的要求。本节在基于“紫外姿态敏感器+星间伪距测量”自主导航方法的基础上,引入星间方向测量信息,提出基于“紫外姿态敏感器+星间相对测量”的星座自主导航方法,可提高星座卫星自主导航的精度。
星间相对测量信息包括星间链路伪距和星间方向。通过星间照相观测可获得星间方向测量,基本方法是在区域星座卫星上安装具有转向功能的照相观测星敏感器,作为区域星座卫星定向观测设备。受太阳、地球和星座卫星之间的位置关系,所观测的卫星的表面积和反射率以及星敏感器探测星范围等因素的制约,星座卫星之间的方向测量信息不是随时可观测到的。当目标卫星相对于观察卫星上的照相观测星敏感器不可见时,不能进行星间照相观测,当目标卫星相对于观察卫星上的照相观测星敏感器可见时,采用基于星敏感器跟踪照相的方式能获取星座卫星之间的相对视线矢量在惯性空间中的指向信息。
可在主星上配置照相观测星敏感器,主星上的照相观测星敏感器同时对副星和背景恒星进行成像,从而可获得副星在惯性空间中的视线矢量,通过星间链路可获得星间伪距观测量,通过紫外姿态敏感器可获得地心方向矢量和地球视半径观测量,然后采用扩展卡尔曼滤波融合紫外姿态敏感器和星间相对测量提供的导航信息,实现星座卫星高精度自主导航。
导航滤波的状态方程与基于“紫外姿态敏感器+星间伪距测量”自主导航方法相同。观测量为参与导航的卫星的地心方向矢量、地球视半径、主星和副星间的星间相对视线矢量及星间链路伪距,离散形式的观测方程可简写为
(18)
其中,u0i为主星与第i(i=1,2)颗副星间的相对视线矢量在惯性坐标系下的表示。
观测量对状态向量的偏导数矩阵为
(19)
其中,
(20)
(21)
滤波算法采用扩展卡尔曼滤波,具体计算为式(12)~(17)。
3 导航系统性能分析
利用Cramer-Rao下界(CRLB)分析星座导航系统的性能。CRLB是根据给定的系统模型、先验信息以及噪声统计特性计算得到的状态估计误差均方差的最小值,直接反映了一个导航系统的本质特性,与滤波算法的选择无关。因此,CRLB对于评价导航系统的性能具有重要意义[9]。
考虑参与导航的3颗卫星都为圆轨道的情况,轨道半长轴为7478.14km,倾角为63.41°,主星和副星2个轨道面夹角为0.85°。实际卫星轨道动力学模型除中心引力项外,还包括了高阶引力项J2,J3和J4;简化的卫星轨道动力学模型除中心引力项外,仅考虑摄动J2项的影响。
首先,对比基于紫外姿态敏感器的星座自主导航系统、基于“紫外姿态敏感器+星间伪距测量”的星座自主导航系统和基于“紫外姿态敏感器+星间相对测量”的星座自主导航系统的性能。假定初始位置误差为10km,地心方向矢量和地球视半径测量误差为0.02°,照相观测星敏感器的星间方向测量误差为10″,且星间方向测量信息总能得到,星间链路伪距测量误差为5m,观测数据每1s更新一次。对应的紫外姿态敏感器的星座自主导航系统、“紫外姿态敏感器+星间伪距测量”的星座自主导航系统和“紫外姿态敏感器+星间相对测量”的星座自主导航系统定轨误差的CRLB如图2所示。从图中可看出,仅利用紫外姿态敏感器的单星自主导航方法收敛速度最慢,导航精度最低;引入星间链路伪距测量,更充分利用了星间相对运动规律,能较大地提高导航精度;而 “紫外姿态敏感器+星间相对测量”导航精度最高。
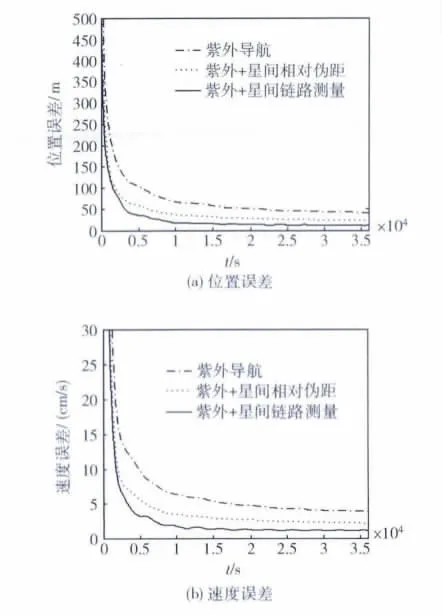
图2 定轨误差方差下界
下面利用CRLB分析基于紫外姿态敏感器的星座自主导航系统、基于“紫外姿态敏感器+星间伪距测量”的星座自主导航系统和基于“紫外姿态敏感器+星间相对测量”的星座自主导航系统各自的精度影响因素。
图3 紫外导航系统定位误差方差下界
地心方向测量误差在0.01°~0.1°之间变化时,对应紫外导航系统定位误差的CRLB平方根如图3(a)所示;地球视半径测量误差在0.01°~0.1°之间变化时,对应紫外导航系统定位误差的CRLB平方根如图3(b)所示。从图3中可看出,仅利用紫外姿态敏感器的单星自主导航系统性能主要取决于紫外姿态敏感器的地心方向测量误差,地球视半径的测量误差对其影响不大,不难理解,三维观测量地心方向较一维观测量地球视半径更能反映出卫星的位置。
地心方向测量误差在0.01°~0.1°之间变化时,对应“紫外+星间伪距测量”导航系统定位误差的CRLB平方根如图4(a)所示;星间链路伪距测量误差在1~100m之间变化时,对应“紫外+星间伪距测量”导航系统定位误差的CRLB平方根如图4(b)所示。从图4中可看出,“紫外+星间伪距测量”导航系统性能受紫外姿态敏感器的地心方向测量误差影响较大,星间链路伪距测量误差对其影响不大。
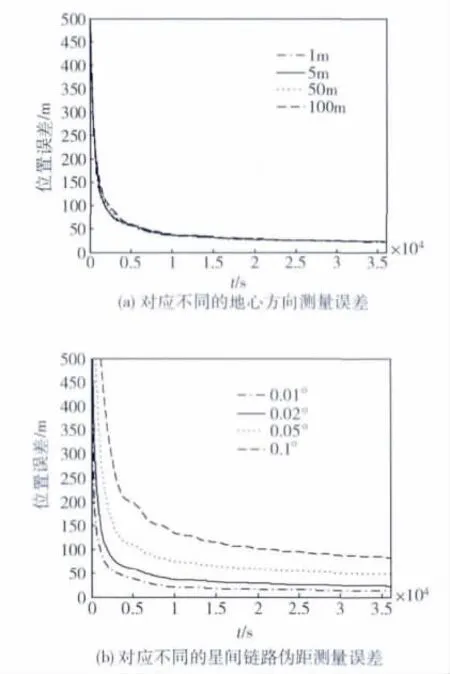
图4 “紫外+星间伪距测量”导航系统定位误差方差下界
地心方向测量误差在0.01°~0.1°之间变化时,对应“紫外+星间相对测量”导航系统定位误差的CRLB平方根如图5(a)所示;星间方向测量误差在1°~30°之间变化时,对应“紫外+星间相对测量”导航系统定位误差的CRLB平方根如图5(b)所示。从图5 中可看出,“紫外+星间相对测量”导航系统性能主要取决于星敏感器的星间方向测量误差,紫外姿态敏感器的地心方向测量误差对其影响较小。

图5 “紫外+星间相对测量”导航系统定位误差方差下界
不难看出,基于紫外姿态敏感器和星间相对测量的星座组合导航系统,在星座卫星之间不可见的弧段内,导航精度主要受紫外姿态敏感器的地心方向测量误差影响,在星座卫星之间可见的弧段内,导航精度主要受照相观测星敏感器的星间方向测量误差影响,而地球视半径测量误差和星间链路伪距测量误差对星座组合导航系统的性能影响不大。因此,提高紫外姿态敏感器和照相观测星敏感器的测量精度,能提高星座组合导航系统的导航精度。
4 算例仿真分析
采用扩展卡尔曼滤波算法对星座导航系统进行数学仿真验证。每颗卫星的3个位置分量和3个速度分量的初始误差分别为10km和10m/s。仿真时间为36000s,约6个轨道周期,且仿真考虑星座卫星之间的可见性。导航精度评估准则如下:
ΔpRMS=
(22)
ΔvRMS=
(23)
其中带“^”的量表示估计值。系统导航精度用滤波进入稳态后(最后12000s)的误差的均方根(RMS值)描述。
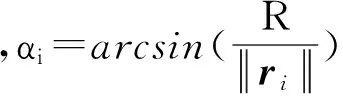
在相同条件下,经过蒙特卡罗仿真,基于紫外姿态敏感器的星座自主导航系统、基于“紫外姿态敏感器+星间伪距测量”的星座自主导航系统和基于“紫外姿态敏感器+星间相对测量”的星座自主导航系统的主星三轴位置误差均方根(RMS)曲线如图6所示。
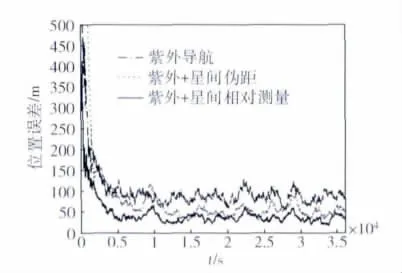
图6 3种导航系统位置误差均方根对比
基于紫外姿态敏感器的星座自主导航、基于“紫外姿态敏感器+星间伪距测量”的星座自主导航和基于“紫外姿态敏感器+星间相对测量”的自主导航定位精度统计值如表格1所示。从仿真结果可以看出,增加星间相对测量能够明显提高导航精度。
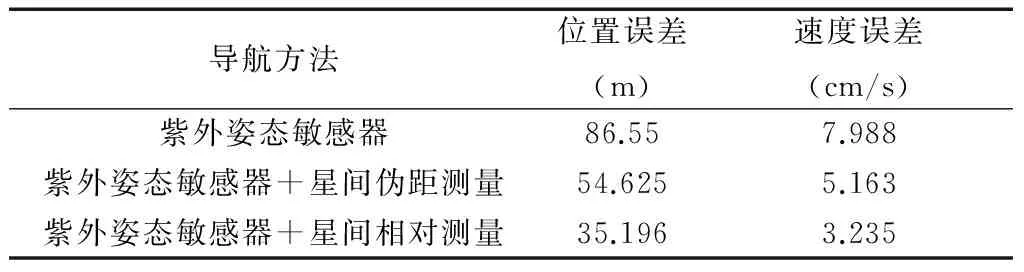
表1 星座卫星导航误差
5 结论
本文研究了基于紫外姿态敏感器和星间相对测量的星座组合导航方法。在星间方向测量信息不可获得的弧段内,可采用“紫外姿态敏感器+星间伪距测量”的方式进行星座卫星的自主绝对导航;在星间方向测量信息可获得的弧段内,采用“紫外姿态敏感器+星间相对测量”的方式进行星座卫星的自主绝对导航。以低轨区域星座为例,基于Cramer-Rao下界分析了组合导航系统的性能,并进行了数学仿真验证。仿真结果表明,同仅利用紫外姿态敏感器进行星座自主导航相比,增加星间相对测量信息能够明显改善星座导航精度,且组合导航系统的性能主要取决于紫外姿态敏感器的地心方向测量精度和照相观测星敏感器的星间方向测量精度。
[1] 刘林,刘迎春.关于星-星相对测量自主定轨中的亏秩问题[J].飞行器测控学报,2000,19(3):13-16.
[2] Psiaki M L.Autonomous Orbit Determination for Two Spacecraft from Relative Position Measurements[J].Journal of Guidance, Control, and Dynamics,1999,22(2):296-304.
[3] 陈金平,尤政,焦文海.基于星间距离和方向观测的导航卫星自主定轨研究[J].宇航学报,2005,26(1):43-46.(CHEN Jinping, YOU Zheng, JIAO Wenhai. Research on Autonav of Navigation Satellite Constellation Based on Crosslink Range and Inter-satellites Orientation Observation[J]. Journal of Astronautics, 2005,26 (1):43-46.)
[4] 魏春岭,李勇,陈义庆.基于紫外敏感器的航天器自主导航[J].航天控制,2004,22(3):35-39.(WEI Chunling, LI Yong, CHEN Yiqing. Spacecraft Autonomous Navigation Based on Ultraviolet Sensors[J].Aerospace Control, 2004,22(3):35-39.)
[5] 管乐鑫,魏春岭.基于紫外敏感器和星敏感器的卫星自主导航[J].空间控制技术与应用,2008,34(3):37-41.(GUAN Yuexin, WEI Chunling.Satellites Autonomous Navigation Based on Ultraviolet Sensors and Star Sensors[J]. Aerospace Control and Application, 2008,34(3):37-41.)
[6] 房建成,宁晓琳,田玉龙.航天器自主天文导航原理与方法[M].北京:国防工业出版社,2006,57.
[7] 秦永元,张洪钺,汪淑华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998.
[8] 李明群,魏春岭,梅志武,姚宁,武延鹏,王哲,袁军.基于资源一号02B卫星姿态敏感器的自主导航[J].空间控制技术与应用, 2009,35(3):58-64.(LI Mingqun,WEI Chunling,MEI Zhiwu,YAO Ning,WU Yanpeng,WANG Zhe,YUAN Jun. Autonomous Navigation Based on Attitude Sensors for CBERS-02B[J].Aerospace Control and Application,2009,35(3):58-64.)
[9] Markley F L.Autonomous Navigation Using Landmark and Intersatellite Data[C].AIAA/AAS Astrodynamics Conference, Washington, 1984.
[10] 韩健,董绪荣,杨龙.星间测向在提高星座自主性中的应用[J].装备指挥技术学院学报,2006,17(1):56-59.(HAN Jian, DONG Xurong, YANG Long. Application of Crosslink Orientation Observation on Increasing Autonomy of Constellation [J]. Journal of The Academy of Equipment Command & Technology , 2006,17(1):56-59.)
[11] Li B,Xu B,Wang H H. Research on Long-term Automous Orbit Determination for Navigation Constellation Using Inter-satellite Orientation Observation Information[C].International Conference on Space Information Technology,China,2009.
[12] 熊凯,魏春岭,刘良栋.基于脉冲星的卫星星座自主导航技术研究[J].宇航学报,2008,29(2):545-549.(XIONG Kai, WEI Chunling, LIU Liangdong. Research on the Autonomous Navigation of Satellite Constellation Using Pulsars[J]. Journal of Astronautics, 2008,29(2):545-549.)
An Integrated Navigation Method for the Constellation Based on Ultraviolet Sensor and Inter-Satellite Relative Measurements
WANG Qun1,2XIONG Kai1,2ZHANG Bin1,2WEI Chunling1,2
1. Beijing Institute of Control Engineering, Beijing 100190,China 2. Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China
Anintegratednavigationmethodfortheconstellationbasedonultravioletsensorandinter-satelliterelativemeasurementsispresentedinthispaper.TheextendedKalmanfilterisdesignedtofuseinformationoftheseobservations.Finally,theperformanceofintegratednavigationmethodisanalyzedbasedonCramer-RaolowerboundandthesimulationiscarriedoutonaLEOregionalconstellation.Thesimulationresultsprovedthefeasibilityofthismethod.
Integratedautonomousnavigation;Ultravioletsensor;Inter-satelliterelativemeasurements;Regionalconstellation; Cramer-Raolowerbound
*国家自然科学基金(61074103)资助项目
王 裙(1988-),女,江西景德镇人,硕士研究生,主要研究方向为航天器自主导航与轨道控制;熊 凯(1976-),男,北京人,高级工程师,主要从事非线性滤波和航天器自主导航方面的研究;张 斌(1981-),男,山西临县人,工程师,主要研究方向为航天器自主导航; 魏春岭(1971-),男,北京人,研究员,主要研究方向为航天器导航、制导与控制。
V448
A
1006-3242(2013)05-0083-07
