SM-PDP板中电极线的检测算法
2012-10-26潘世丽张金龙刘京南
潘世丽 张金龙 刘京南
1.硅湖职业技术学院,江苏 昆山 215332;2.南京师范大学电气与自动化工程学院,江苏 南京 210042;3. 东南大学自动化学院,江苏 南京210096
SM-PDP板中电极线的检测算法
潘世丽1张金龙2刘京南3
1.硅湖职业技术学院,江苏 昆山 215332;2.南京师范大学电气与自动化工程学院,江苏 南京 210042;3. 东南大学自动化学院,江苏 南京210096
东南大学自主研制开发的SM-PDP显示屏的生产工艺要求上基板的电极线和下基板的电极线两两垂直交叉于荫罩板上的相应网孔,应用计算机视觉检测技术可以实现三块板的初定位。本文在Canny边缘检测的结果图上,应用Freeman链码、模式匹配度、K均值聚类算法识别出了电极线的斜率、位置和十字线的位置,理论分析和试验验证相结合,为后面视觉检测与定位部分的研究奠定了基础。
Freeman链码;模式匹配度;K均值聚类算法;电极线检测;十字线检测
引言
PDP显示屏的生产工艺要求上基板的电极线和下基板的电极线两两垂直交叉于荫罩板上的相应网孔.对于CCD摄取的一幅下基板和荫罩板的图像(图1),使用Canny算法可以将图像中的一部分电极线边缘和网孔圆弧形边缘检测出来(图2).由图2可知,图像预处理操作可将电极线、网孔的边界标定出来.但是作为屏板图像的主要标识,它们精确的几何位置,比如电极线的倾斜角度是预处理操作无法获取的,这需要由图像的识别算法来实现.图像识别算法是机器视觉技术的核心,基本思想是从图像预处理后所获得的边缘二值图像中获取对应标识图形的位置信息。

图1 下基板和荫罩板的图像

图2 Canny边缘检测图
1 电极线的检测
1.1 Freeman链码原理简介
一条数字化二值曲线可用方向链码(Freeman码)表示。Freeman出于模式识别的目的提出了用图3所示的不同斜率方向的8个小直线段作为基元,通过这8个方向的编码来描述线条图即为Freeman 链码。
1.2 运用Freeman准则的直线检测算法
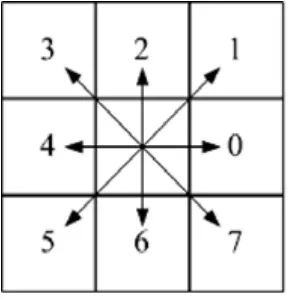
图3 Freeman链码
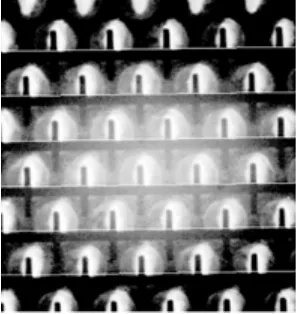
图4 电极线检测结果图
参数说明 ⑴ LT:预设的最小直线段长度阈值。
(2)S:链码串的直线近似度。
(3)ST :预设的直线近似度阈值。
(4)在计算链码串的实际长度时,若方向码为0、2、4、6,则链码连接的两像素间的实际长度为1;若方向码为1,3,5,7,则两像素间的实际长度为。算法步骤(1)将目标边界跟踪得到的链码串,依次与LT比较,若小于LT则舍弃该链码串。
(2)从起点开始将满足(1)的子链码分别计算它们的s,若s ≥st,则该段满足直线约束,转(3),否则舍弃该段,继续判断下一段子链码串。
(3)若前一段子链码串也满足直线约束,则考虑相邻的两条子链码串能否合并成一条更长的直线段.将前一段链码串的起点到本段链码串的终点间的这段链码看作一条新的链码串计算其直线段近似度s,若s ≥st,则进行合并,否则将本段子链码串标记成一条新的直线段。
(4)若已到达链码串终点,则结束,否则转(1)继续判断下一段子链码串。
实验结果
针对图1的原始图图像,采用上面的算法,设置st为52个像素,最小直线相似度值为0.95,可得到实验结果(图4),电极线斜率k=0.014.其中白色直线为检测到的电极线.
2 电极线上十字线的识别

图5 电极线上十字线的几何位置
2.1 十字线匹配度
电极线的位置一旦求出,就可在电极线上搜索十字线的位置(见图5),设同一个电极线上相邻两个十字的间距为l个像素,则相邻两个十字的水平间距L=l×cos(θ)个像素,十字线长度为C个像素,则十字线在纵坐标上的投影长度A=C×cos(θ)个像素,十字线在横坐标上的投影长度为B= C×sin(θ) 个像素。
当用斜率值固定的直线依次遍历图像中的像素点,对于每个横坐标,可以找到图像中所有位于直线上的像素点的总数以及这些像素点中所有为标记的边界像素点的总数,用这两个值之比代表图像中此处存在十字线的近似度量,记为approx;使用上述方法在图像中遍历查找得到一组approx,取这组approx中的最大值为图像中存在这个斜率十字线的匹配度,这样,每个横坐标都对应了一个匹配度量,这个匹配度量标识了图像中存在这个斜率十字线的可能性大小,当用斜率为-1/k的直线在检测到的最上面一条电极线附近扫描十字线时,就会得到电极线上不同位置十字线的匹配度.扫描到存在十字线的图像位置时,位于直线上的黑色像素点会大量增加,表现为十字线匹配度量approx会出现峰值(见图6)。
2.2 K均值聚类方法识别十字线

图6 聚类识别结果
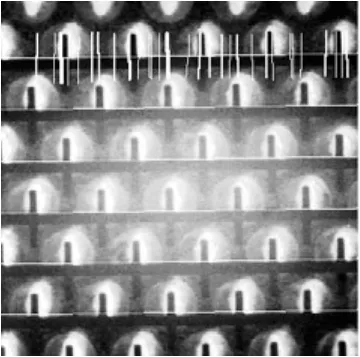
图7 十字线识别结果
tK均值聚类算法是一种采用迭带最优化方法求最优划分的动态聚类法.其中心思想是通过不断调整聚类中心使得误差平方和准则函数取得极小值.使用K均值聚类方法对上述十字线匹配度数组进行聚类判别,聚类数c为3,最大迭代次数m为100,聚类得到的三类数据之间的分割门限为:0.089、0.203,如图6中红色直线所示,十字线匹配度最大的一类点就是可能存在十字线的点。根据这些点对图4最上面第一条电极线进行简单十字线识别,结果如图7所示,图中的竖直白线条为标记出的十字线。
判别出存在十字线中心点的横坐标为:38、39、54、55、59、60、65、77、78、89、90、105、106、107、121、122、126、127、133、150、156、174、175、189、194、200、201、214、215、224、239、240、256、257、261、262、268、280、281、291、323、324、328、335、336、348。
2.2.3 十字线识别的改进方法
由图7可见识别出的十字线与实际的位置有很大的误差,并不能精确表示十字线中心点的横坐标。考虑到下基板上电极线分布的规律性:相邻两根电极线之间的间距为51个像素,电极线上的十字之间的间隔为68个像素,由图5可知相邻两个十字线中心的横坐标相差L,近似68个像素.如果存在十字线,那么十字线的中心位置应该相互间隔整数个L,由图6可知第一个最大的十字线匹配点的横坐标为127。理想情况下,识别得到的十字线的横坐标为:127-68=59、127、127+68=195、127+68×2=263、127+68×3=331、127+68×4=399;
根据上述方法得到最终的十字线位置为:60、127、195、262、330。
2.2.4 矫正后的实验结果
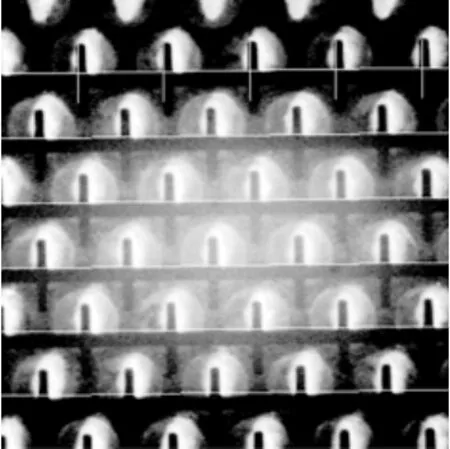
图8 第一条电极线上十字线检测的结果图

图9 全部电极线、十字线的识别结果图
3 结论
本文在Canny边缘检测的结果图像上运用Freeman链码,模式匹配度量和K均值聚类方法进行了电极线检测,基本可以满意地把电极线和十字线的位置识别出来,为后续图像检测及定位工作奠定了基础。
[1]孙涵,任明武,杨静字.一种快速实用的直线检测算法[A].计算机应用研究,2006,2:256~257
[2]钟珞,潘昊,封筠,何平.模式识别.武汉大学出版社,2006:113~114.
[3]张金龙,余玲玲,刘京南. 精密检测与定位技术的研究,仪器仪表学报,2004,25(6 ):754~756
国家863计划资助项目(2005AA303610)、江苏省自然科学基金项目(BK2009406)
10.3969/j.issn.1001-8972.2012.07.017
