永磁直线同步电机推力波动约束
2012-09-16陆华才郭兴众陈其工
陆华才 江 明 郭兴众 陈其工
(安徽工程大学电气工程学院 芜湖 241000)
1 引言
由于直线电机可以直接驱动直线运动平台,省掉了诸如滚珠丝杆、齿轮等传动机构,实现了所谓的“零传动”,现已越来越多地应用于各种高性能要求的场合。而永磁直线同步电机(PMLSM)具有结构简单、体积小、推力大、损耗低、动态响应速度快等特点,与其他高速精密进给系统相比,PMLSM进给系统具有较大的优越性。然而,PMLSM 也存在一些客观存在的缺点,其磁路开断产生的边端力、永磁体和铁心相互作用产生的法向力和磁链谐波产生的齿槽力会使得电机推力产生波动,推力波动会导致电机振动,恶化其伺服运行性能,从而限制了PMLSM在高速精密驱动系统中的广泛应用[1-3]。
为了最大限度约束推力波动,提高伺服精度,国内外学者对此做了大量研究,主要形成了两种方法,即改进优化电机结构的方法和通过控制补偿抑制推力波动的方法。徐月同、潘开林等人[4-7]通过优化电机动子长度方法降低边端力,采用分数槽结构方法降低齿槽效应引起的齿槽力,极大地减少了PMLSM推力波动,提高 PMLSM进给系统的定位精度和重复定位精度,但是势必要增加电机制作成本,而且对于已经做好的电机这种方法就不可行了。Kok等人[8-10]采用滞后的继电反馈(Hysteretic Relay Feedback)控制方法,对推力波动和摩擦力扰动进行了补偿,改善了跟踪性能,其中的推力波动是通过实验得到的一个经验公式,还不能从根本上改变推力波动的影响。
本文首先通过有限元分析求解PMSLM产生推力波动的主要因素齿槽力和法向力,再用傅里叶级数拟合齿槽力曲线,得到推力波动的变化规律;其次,利用电流预测控制模型来消除齿槽力引起的推力波动,同时利用在线扰动观测器补偿方法进一步削弱其他次要的推力波动;最后进行了实验验证。
2 PMLSM矢量控制模型
图1为PMLSM采用id=0的矢量控制系统。忽略磁饱和,假设电机的反电势是正弦的,当仅考虑基波分量,可以使用d-q轴模型。注意到由永磁体产生的磁动势为定值及在次极上无阻尼绕组,对电机的参数、电流、电压及磁链作派克变换,可得到电机的d-q轴电压平衡方程

式中ud,uq——d、q轴电压;
Ld,Lq——d、q轴电感;
ψd,ψq——d、q轴磁链,且ψd=Ldid+ψf,ψq=Lqiq。
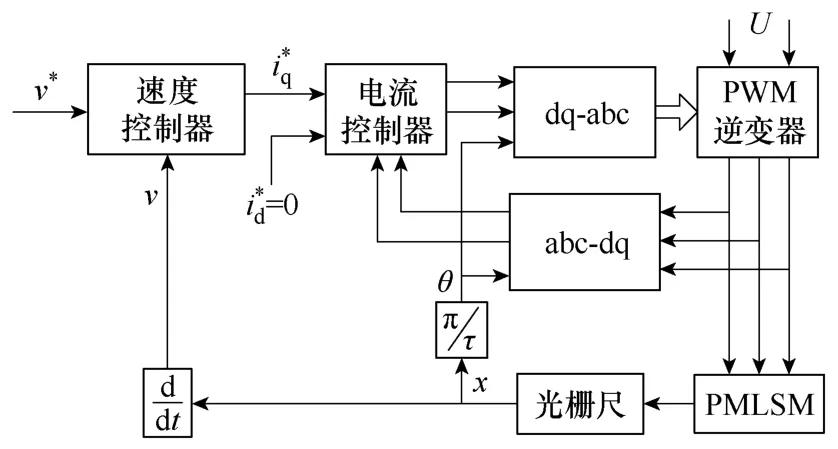
图1 PMLSM矢量控制系统Fig.1 Vector control system of PMLSM
根据电磁推力、速度和电磁功率的关系,可以推导出电磁推力为

由于采用id=0的控制时,电机可获得最大的推力为

3 有限元分析
为了实现对齿槽力引起的推力波动的有效补偿,首先对PMLSM进行有限元分析,推导齿槽力的变化规律。由于求解区域有电流源存在,本文采用矢量位分析方法。为了简化分析,作如下假设:
(1)硅钢片材料均匀各向同性,其磁化曲线是单值的。
(2)定、转子轭各向同性,且磁导率无穷大。
(3)各场量随时间正弦变化。
假设初级铁心表面光滑,将永磁体等效成磁化电流(EMC)分布模型,如图2所示。这样可得到有限元分析模型为

式中γ——材料磁阻率,γ=1/μ,其中,μ为材料磁导率;
Az——矢量磁位A的z轴分量;
J0——绕组电流密度;
Jm——永磁体等效磁化电流密度;
Ht——磁场强度的切向分量;
Γ1——第一类边界条件;
Γ2——第二类边界条件。
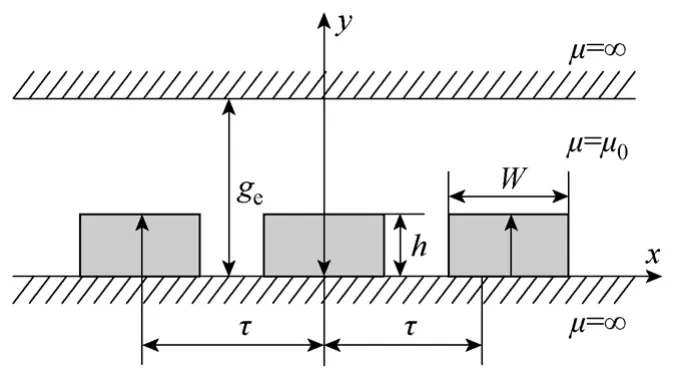
图2 永磁体有限元分析模型Fig.2 FEM model of permanent magnet
PMLSM具体参数见下表。按照id= 0矢量控制方法加载三相电枢电流边界条件,对PMLSM的磁矢势进行有限元分析计算,图3是用有限元分析的二维电磁场磁密分布图。然后应用后处理程序计算其电磁场分布和输出力,可得到采用矢量控制技术下电机电磁场分布和力特性。计算电机处于不同位置时的输出力,得到齿槽力和法向力分别如图4和图 5所示,其中β是永磁体宽度和PMLSM的极距的差,β越小齿槽推力和法向力越大,但β太小电机效率会降低。法向力随着β的变化,以及随位置的变化虽然最大有200N,但乘以 0.01的摩擦系数后产生的推力波动可以忽略,因而法向力产生的推力波动可以根据其平均值进行补偿。
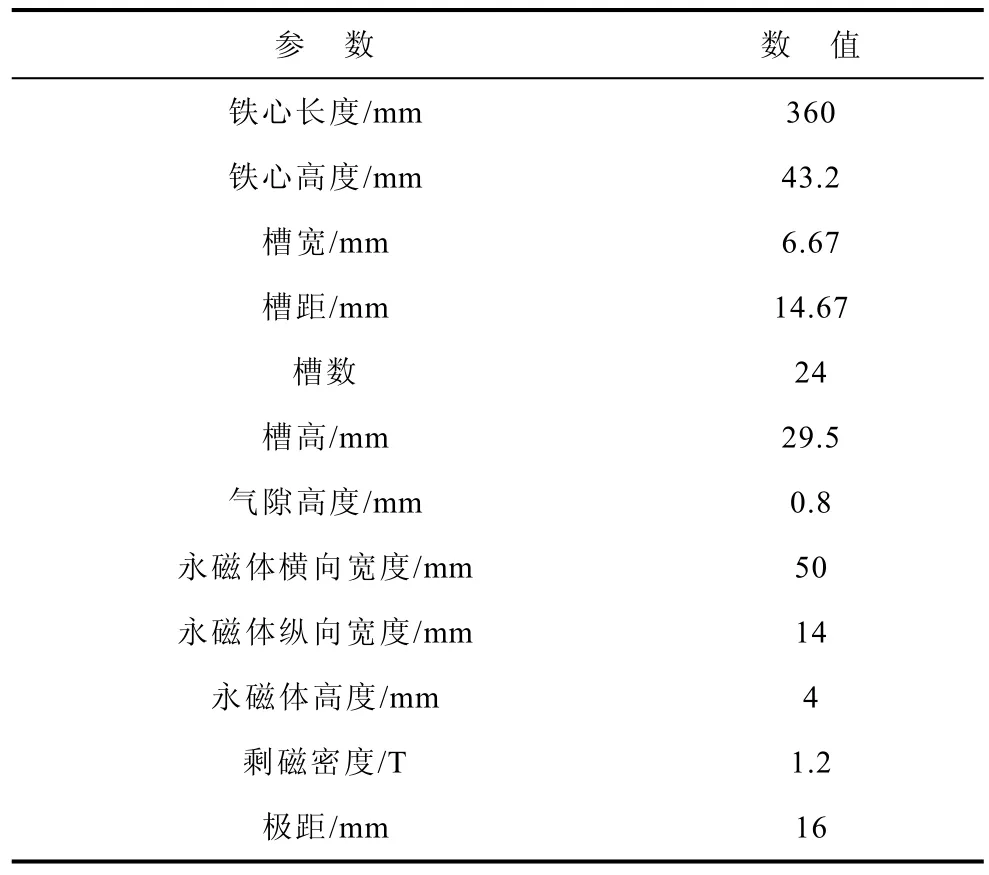
表 PMLSM相关参数Tab. Parameters of PMLSM

图3 二维电磁场磁密分布图Fig.3 Flux density of two dimension magnet field
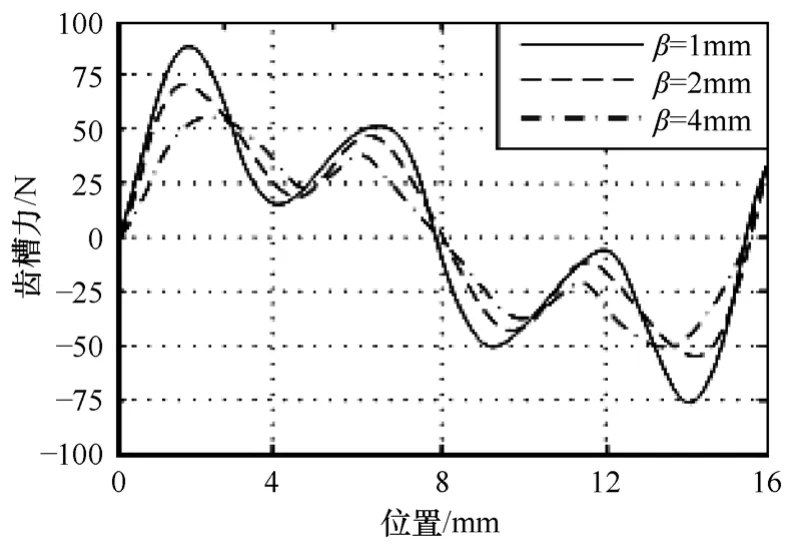
图4 齿槽力有限元分析结果Fig.4 FEM analysis results of slot force

图5 法向力有限元分析结果Fig.5 FEM analysis results of normal force
4 推力波动补偿控制方法
根据上述分析,发现推力波动主要由齿槽推力引起的,齿槽推力是周期性变化的,将齿槽推力有限元分析结果利用4阶傅里叶级数分析拟合,可得到

根据式(5)设计补偿控制器,对交轴电流控制输入进行补偿。齿槽力引起的推力波动补偿后,还有法向力引起的摩擦力、边端效应及电器元器件工作时性能变化等引起的扰动影响。为了抑制这些扰动的影响,本文采用扰动观察器进行补偿。观察器采用PMLSM的逆动力学模型为

扰动观察器补偿的权重因子为Q,为保证系统鲁棒稳定,一般Q<1,根据仿真研究,取Q=0.3。这样,便可设计出如图6所示的控制系统。

图6 PMLSM控制系统结构Fig.6 Control system structure of PMLSM
5 实验结果
PMLSM高速精密工作台如图 7所示,由控制柜及进给装置组成。控制柜由变压器、24V直流电源、驱动器、接触器及计算机等组成。进给装置由永磁直线同步电机、动子底板、定子底板、光栅尺、限位开关、导轨副等组成。电机的最大推力为1 250N,其他相关参数有Ld=Lq= 26.7mH,ψf= 0.3V·s,m=28kg,R=2.65Ω,Bv=4N·s/m。根据图1所示的矢量控制系统以及图6所示的带推力波动补偿控制的系统结构,构建PMLSM的控制模块。受电机动子最大行程和平台抗冲击能力的限制,电机往复运动速度设为500mm/s,加(减)速度设为4 000mm/s2。为了比较推力波动不加补偿和补偿后系统性能的变化,对是否带推力补偿分别进行了实验。图8是补偿前后A、B两相电流波形,从图中可以看出补偿后的电流波动和冲击都得到了明显改善。图9是补偿前后电机速度波形,补偿后电机运行变得更加平稳,速度波动显著减小,只有补偿前的15%。

图7 永磁直线同步电机实验装置Fig.7 Experimental facility of PMLSM

图8 补偿前后电流波形Fig.8 Current waveforms before and after compensation
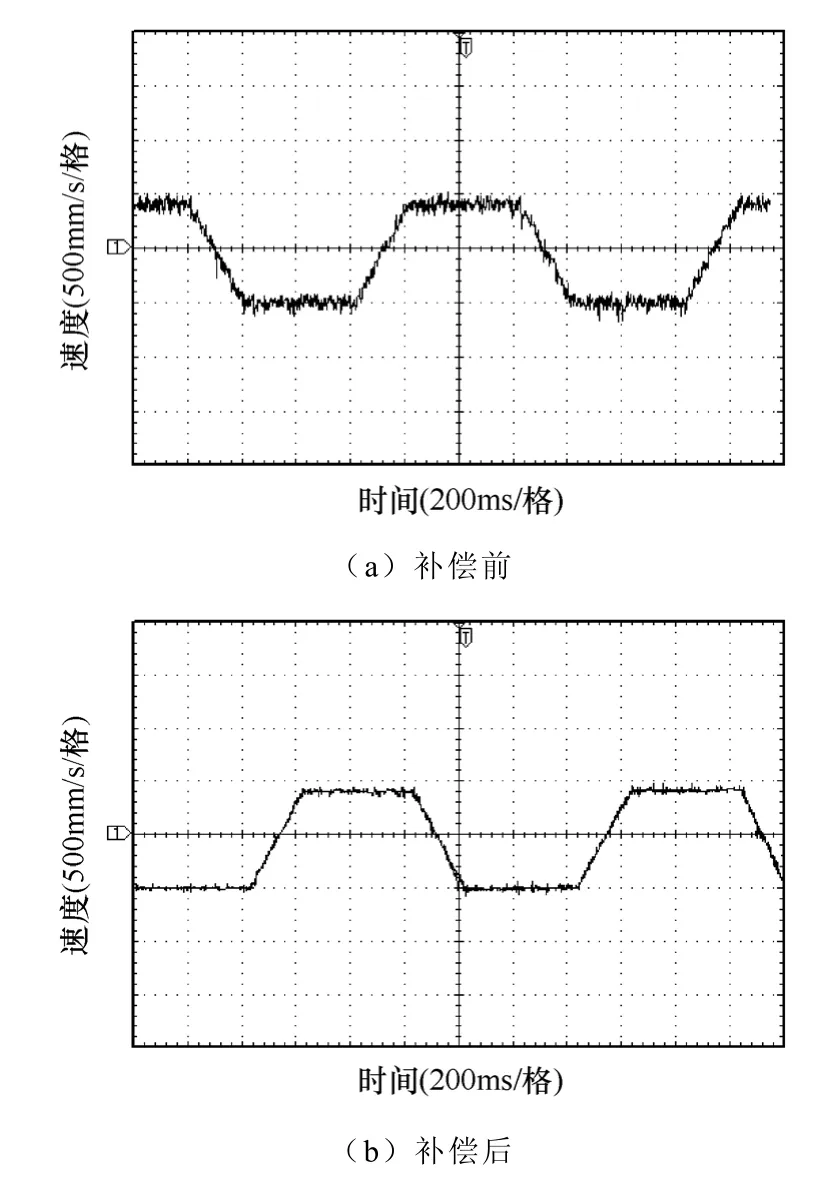
图9 补偿前后速度波形Fig.9 Speed waveforms before and after compensation
6 结论
本文在分析了永磁直线同步电机推力波动特性的基础上,通过对推力波动分析、傅里叶级数拟合,建立了推力波动的非线性数学模型。基于此模型,设计了PMLSM在任意速度、任意位置的推力波动预测补偿控制器,同时通过扰动观测器设计了前馈补偿,有效地抑制了精密工作台中永磁直线同步电机的推力波动。实验结果表明,利用本文设计的推力波动补偿控制器,可以将电机速度波动降低到补偿前的15%左右,有效的改善了PMLSM直接驱动性能。
[1]陆华才, 徐月同, 杨伟民, 等. 永磁直线同步电机进给系统模糊 PID控制[J]. 电工技术学报, 2007,22(4): 59-63.
Lu Huacai, Xu Yuetong, Yang Weimin, et al. Fuzzy PID controller design for a permanent magnet linear synchronous motor feeding system[J]. Transactions of China Electrotechnical Society, 2007, 22(4): 59-63.
[2]陈宇, 卢琴芬, 叶云岳. 长定子同步直线电动机的设计及其优化[J]. 电工技术学报, 2003, 18(3): 18-21.
Chen Yu, Lu Qinfen, Ye Yunyue. Optimal design of a long stator synchronous linear motor[J]. Transactions of China Electrotechnical Society, 2003, 18(3): 18-21.
[3]杨俊友, 马航, 关丽荣, 等. 永磁直线电机二维分段复合迭代学习控制[J]. 中国电机工程学报, 2010,30(30): 74-80.
Yang Junyou, Ma Hang, Guan Lirong, et al.Two-dimensional segmented synthesis Iterative learning control of permanent magnet linear motor[J].Proceedings of the CSEE, 2010, 30(30): 74-80.
[4]张月玲, 党选举. 基于死区迟滞函数的永磁同步直线电机滑模控制[J]. 中国电机工程学报, 2011,31(3): 67-74.
Zhang Yueling, Dang Xuanju. Sliding mode control based on dead-zone hysteresis function for PMLSM[J]. Proceedings of the CSEE, 2011, 31(3):67-74.
[5]徐月同, 傅建中, 陈子辰. 永磁直线同步电机推力波动优化及实验研究[J]. 中国电机工程学报, 2005,25(12): 112-115.
Xu Yuetong, Fu Jianzhong, Chen Zichen. Thrust ripple optimization and experiment for PMLSM[J].Proceedings of the CSEE, 2005, 25(12): 112-115.
[6]潘开林, 傅建中, 陈子辰. 永磁直线同步电机的磁阻力分析及其最小化研究[J]. 中国电机工程学报,2004, 24(4): 122-126.
Pan Kailin, Fu Jianuzhong, Chen Zichen. Detent force analysis and reduction of PMLSM[J]. Proceedings of the CSEE, 2004, 24(4): 122-126.
[7]Yaow Ming Chen, Shu Yuan Fan, Wei Shin Lu.Performance analysis of linear permanent-magnet motors with finite-element analysis[J]. IEEE Transactions on Magnetics, 2008, 44(3): 377-385.
[8]Si Lu Chen, Kok Kiong Tan, Sunan Huang, et al.Modeling and compensation of ripples and friction in permanent-magnet linear motor using a hysteretic relay[J]. IEEE/ASME Transaction on Mechatronics,2010, 15(4): 586-594.
[9]Tavana N R, Shoulaie A. Pole-shape optimization of permanent-magnet linear synchronous motor for reduction of thrust ripple[J]. Energy Conversion and Management, 2011, 52(1): 2011.
[10]Krop D C J, Lomonova E A, Vandenput A J A.Application of schwarz-christoffel mapping to permanent-magnet linear motor analysis[J]. IEEE Transactions on Magnetics, 2008, 44(3): 352-359.
