永磁无刷直流电机及其控制
2012-09-16夏长亮方红伟
夏长亮 方红伟
(1.天津工业大学电工电能新技术天津市重点实验室 天津 300387 2.天津大学电气与自动化工程学院 天津 300072)
1 引言
当前,节能减排是我国经济与能源可持续发展的必由之路,这将大大助推永磁电机在我国的发展和应用。作为永磁电机中的重要成员,无刷直流电机也必将借助我国是世界上最大的稀土储藏国这一先天优势,为我国高效节能电机系统的构建和工业生产的低碳化做出重要贡献。
无刷直流电机是指具有串励直流电机起动特性和并励直流电机调速特性的梯形波/方波直流电机,其基本结构由电机本体、功率驱动电路及位置传感器三者组成[1]。无刷直流电机具有结构简单、出力大和效率高等特点。随着电机技术、电力电子技术、数字控制技术、控制理论及传感器技术的发展与应用,无刷直流电机的一般控制技术已日趋成熟,相关生产制造工艺和通用技术也均规范化,并形成了GJB1983—1984、GB/T21418—2008等一系列标准。同时,其电机优化设计、节能型驱动、转矩波动抑制、无位置传感器控制、弱磁调速等技术难题均得到了很好的研究和解决[2-9]。目前,无刷直流电机已在国防、机器人、航空航天、轨道交通、精密机床、汽车电子、家用电器、办公自动化、以及工业过程控制等领域得到了广泛的应用[10-12]。
本文首先介绍了无刷直流电机的基本工作原理,比较了各种驱动电路拓扑结构的优越性,然后对该类电机尚未完全解决的转矩波动抑制、无位置传感器控制和弱磁调速等关键问题进行了论述,最后对该类高效电机的应用场合进行了总结,并对其发展趋势进行了探讨。
2 无刷直流电机基本结构与工作特点
无刷直流电机为了实现其无机械接触式换相,取消了电刷,并将电枢绕组和永磁磁钢分别放在定子和转子侧,成为“倒装式直流电机”结构。为了实现对电机转速和转向的控制,无刷直流电机必须具有由转子位置传感器和逆变器等共同构成的换相装置,如图1所示。
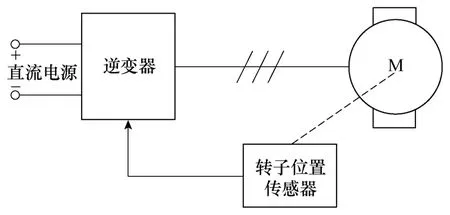
图1 无刷直流电机原理框图Fig.1 Principle diagram of BLDC motor
无刷直流电机的定子结构与普通同步电机或感应电机相似。对于常用的三相无刷直流电机,其电枢绕组可以Y联结或△联结,但考虑到系统的性能和成本,目前应用较多的是电枢绕组Y联结、三相对称且无中性点引出的电机。无刷直流电机的绕组形式主要有整距集中绕组、整距分布式绕组、短距分布式绕组等[5,13]。绕组形式的不同将影响电机的反电动势波形,进而影响到电机的性能。一般来讲,整距集中绕组能得到较好的梯形反电动势波形,短距绕组则有利于削弱转矩波动。
转子结构有三种典型形式:表面粘贴式磁极、嵌入式磁极和环形磁极。永磁体材料主要有铝镍钴、铁氧体、钐钴和钕铁硼等,一些新的复合磁性材料也正逐渐被应用到无刷直流电机中来[16]。
无刷直流电机常用的位置传感器有电磁式、光电式和磁敏式等。Hall传感器为磁敏式位置传感器的一种,其体积小、使用方便且价格低廉,在无刷直流电机控制系统中应用广泛。特殊的集成电路则可将Hall传感器等位置信号直接变成数字信号,便于无刷直流电机控制的数字化与智能化实现。
3 无刷直流电机驱动拓扑结构
3.1 半桥式
常见的三相半桥式驱动电路如图2所示。

图2 半桥式驱动电路Fig.2 Half-bridge driving circuit
三相半桥式驱动方式下的无刷直流电机控制系统的优点是驱动元件个数少、成本低、控制简单,但其转矩波动较大、电机绕组利用率低,一个周期内每相绕组只有 1/3周期通电,因而在实际应用中较少采用。
3.2 全桥式
图3为三相全桥式驱动电路示意图,其常见导通方式又可分为两两导通和三三导通方式。

图3 全桥式驱动电路Fig.3 Full-bridge driving circuit
3.2.1 两两导通方式
两两导通方式指每一时刻电机都有两相导通,第三相悬空,各相的导通顺序与时间由转子位置信号决定。该方式下,正常工作时,每一时刻上下桥臂都分别仅有一只功率器件导通。即使在换相时刻,也不容易导致同一桥的上、下桥臂同时导通。电机每经过一次换相,合成转矩的方向转过60° 电角度,一个周期内转矩要经历六次方向变换,使得转矩波动比三相半桥式驱动电路要小而缓。
3.2.2 三三导通方式
三三导通方式指每一瞬间逆变桥均有三只功率器件同时通电。同两两导通方式相比,也是每隔1/6周期(60○电角度)换相一次,其硬件原理亦完全相同。只是功率器件的导通次序和导通时间不同,此时每只功率器件在一个周期内导通180○电角度。
三三导通方式可更进一步提高绕组的利用率,减少转矩波动,但是三三导通方式在换相时刻容易导致同一桥的上、下桥臂同时导通。
对于△联结的三相全桥式无刷直流电机的控制,它和Y联结的区别甚少,只需将△联结电机中的A、B相绕组的连接处对应于Y联结电机中的A,△联结电机中B、C相绕组的连接处对应于Y联结电机中的B,△联结电机中的 C、A相绕组的连接处对应于Y联结电机中的C,而无需改变任何其他软、硬件设计。
3.3 C-Dump式
在一些特定的无刷直流电机应用场合,一方面要实现较好的控制性能,另一方面又要求系统成本低、安装尺寸小等。对此,许多学者提出了一种介于半桥式控制和全桥式控制间的折衷控制方法,即C-Dump式驱动电路[15]。对于三相无刷直流电机,它只需4个开关元器件,其拓扑结构如图4所示,该结构也可实现电机的四象限运行。
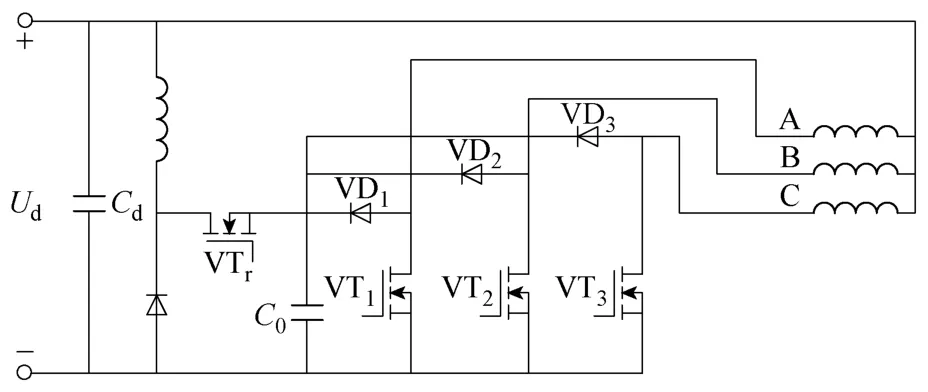
图4 C-Dump式驱动电路Fig.4 C-Dump driving circuit
与全桥式驱动电路相比,C-Dump驱动电路具有较少的功率器件和较小的能量损耗,但增加了 1个电感和1个电容,换相转矩波动也比全桥式大。
3.4 H桥式
H型功率逆变桥如图5所示,其特点是每个绕组采用1个H桥独立控制,可灵活改变绕组电流的大小和方向,易于实现电机的四象限控制[16]。

图5 H桥式驱动电路Fig.5 H-bridge driving circuit
因为功率器件数量等于电机相数的4倍,所以H型功率逆变桥一般只在单相或两相电机控制中使用。同时,为防止同相上、下桥功率器件同时导通而造成直通短路现象,须对驱动信号进行死区延时控制,死区时间要大于功率器件的关断时间。
3.5 四开关式
四开关式驱动电路结构如图6所示,图中四开关三相拓扑结构由两个电容代替六开关三相逆变桥的一组桥路,电机C相绕组接在串联电容的中点。这样,电路节省了两个功率器件,一定程度上降低了系统的成本,减小了由器件引起的能量损耗,但会增加控制的复杂性[17,18]。

图6 四开关式驱动电路Fig.6 Four-switch driving circuit
4 无刷直流电机转矩波动抑制
根据产生机理的不同,无刷直流电机转矩波动主要分为齿槽转矩波动和换相转矩波动两类。相比于永磁同步电机,其转矩波动较大,一定程度上制约了它在高精度、高稳定性场合的应用。为此,许多专家学者一直致力于无刷直流电机系统转矩波动抑制的研究,并取得了丰硕的成果[19-25]。
4.1 齿槽转矩波动抑制
齿槽转矩是由于定转子齿槽的存在,不同位置磁路的磁阻存在差异,气隙磁场在空间分布上出现锯齿形波动,进而造成电机反电动势波形产生畸变,引起的转矩波动。减小齿槽转矩是无刷直流电机设计时需解决的难题之一。采用CAD、CAM等技术,对电机结构进行合理优化与改进,可有效减小齿槽转矩。目前抑制齿槽转矩的方法主要有斜槽/斜极法、磁性槽楔法、减小槽口宽度法、辅助槽/辅助齿法、分数槽法、变极弧宽度和变磁极位置法等[5]。文献[25]将电机设计方案的优化归结为多目标函数的非线性规划问题,利用模糊小生境遗传算法对无刷直流电机进行了优化设计,设计得到的电机具有电磁转矩提升速度快和转矩波动小等特点。图7是对应的具体优化流程图。
4.2 换相转矩波动抑制
无刷直流电机运行时,一般其导通状态持续时间较长,决定了电机稳态电磁转矩的大小;换相过程持续时间虽较短,但也影响着电机的性能。换相暂态过程复杂,时间短暂,而且转速和负载越大,换相转矩波动越明显。采用传统的同时开通导通相、关闭关断相的换相方法,在很多情况下,无论如何选择换相时间,都只能在一定程度上减小转矩波动,而不能达到理想的效果。

图7 基于模糊小生境遗传算法的电机优化设计流程Fig.7 Flowchart of motor design optimization based on fuzzy niche genetic algorithm
4.2.1 分时换相策略分析
分时换相策略则分别控制导通相开通和关断相断开的时间[1]。
(1)完全关断后开通的换相方式:先关闭待关闭相(t=tcut),待其电流衰减为零(t=toff),被完全断开后再开通待开通相(t=ton),此时tcut<toff<ton。
(2)先关闭后开通的换相方式:先关闭待关闭相,在其衰减为零前开通待开通相,此时tcut<ton<toff。
(3)先开通再关闭的换相方式:先开通待开通相,再关闭待关闭相,此时ton<tcut<toff。
实际证明,采取先开通后关闭的控制策略可抵消反电势的影响,减小换相转矩波动。
4.2.2 基于自抗扰控制技术的换相转矩波动抑制
结合模糊、神经网络、自抗扰和直接转矩控制等技术,对无刷直流电机的换相转矩波动进行抑制是当前的研究热点之一[19-27]。文献[27]根据无刷直流电机特性及自抗扰控制器(ADRC)设计原则,将电机等效为由两个非线性系统构成的积分串联型对象,设计两个一阶自抗扰控制器,实现对电机的双闭环控制,如图8所示。
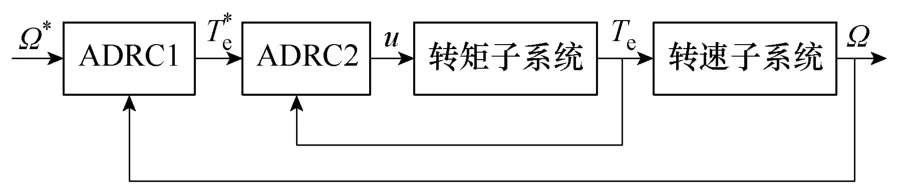
图8 抑制转矩波动的自抗扰控制框图Fig.8 Scheme of the ADRC to reduce torque ripple
在图8的自抗扰控制器中,系统的外扰和内扰处于同等地位,而扩张状态观测器能够快速地跟踪电磁转矩输出,并给出转矩子系统的实时作用值。对于给定的转矩参考值,转矩波动作为系统内扰,可由扩张状态观测器实时估计,并通过调整逆变器电压输出加以补偿,从而保证转矩输出平稳。
5 无刷直流电机无位置传感器控制
位置传感器的使用,简化了无刷直流电机的控制复杂性,但其存在可能增大电机系统的体积与转动惯量、增加系统引线和降低系统可靠性,因此一定程度上也限制了无刷直流电机在空间有限等场合中的应用。为解决此问题,反电动势法、磁链法、电感法及人工智能法等无位置传感器控制方法被提出并逐渐应用到了无刷直流电机的控制中[28-36]。
5.1 反电动势法
在各种无位置传感器控制方法中,反电动势法是目前技术最成熟、应用最广泛的一种位置检测方法。该方法将检测获得的反电动势过零点信号延迟30°电角度,得到六个离散的转子位置信号,为逻辑开关电路提供正确的换相信息,进而实现无刷直流电机的无位置传感器控制。
反电动势法的关键是如何准确检测反电动势过零点,国内外众多学者对反电动势法已进行了深入研究,并提出了端电压检测法、反电动势积分法、反电动势三次谐波法、续流二极管法以及线反电动势法等多种检测方式。
在实际应用中,需要注意在端电压检测方法中,引入相应的相移补偿措施,解决因滤波等环节引起的端电压相位延迟问题。反电动势积分法中的门限值设置问题、反电动势积分法和反电动势三次谐波法中的积分累计误差等问题也都需要重点考虑。
5.2 磁链法
不同于反电动势法,磁链法是通过直接估计磁链以获得转子的位置信息。由测量的电压、电流获得电机磁链,若转子初始位置、电机参数、磁链与转子位置关系已知,则可由估计得到的电机磁链判断出转子位置。
采用磁链法控制电机时,应首先确定转子起动初始位置,以获得积分过程所必需的磁链初始值信息。磁链法计算量较大,在低速运行时会产生误差累计且易受电机参数变化影响。
5.3 电感法
电感法的基本原理是:首先在绕组中施加方波电压脉冲并检测其产生的电流幅值,然后比较电流幅值得知电感差异,最后根据电感与转子位置之间的关系判断转子位置。
电感法对于电机静止时转子初始位置检测效果较好,但由于无刷直流电机转子位置不同时电感差异较小,因此该方法依赖于高精度的电流检测。
5.4 人工智能法
5.5 无位置传感器控制下的起动方法
目前,无刷直流电机无位置传感器控制多采用反电动势法,但当电机静止或转速很低时,反电势为零或很小而不易检测,因而难以实现电机的自起动。针对该问题,国内外学者提出了多种起动方法,主要有:三段式起动法、预定位起动法、升频升压同步起动法、高频信号注入法、电压插值起动法、智能起动法等[35,36]。
6 弱磁调速
无刷直流电机在基速以下运行时,经常可通过各种形式的双闭环控制策略,并辅以PWM和滞环控制等技术,获取对系统的良好控制效果[41]。而在基速以上运行时(即弱磁控制状态),如电动汽车的恒功率运行,则需进一步采用相电流提前导通、辅助励磁、变绕组接线方式等手段来实现[5,33,42,43]。相电流超前导通方法原理如图9所示,图9a给出了相电流超前导通模式下的相电流i和正常导通模式下的相电流i0以及相反电动势e之间的相位关系。图9b为不同α角下电机在基速以上的转矩-转速特性变化趋势图。

图9 相电流超前导通原理示意图Fig.9 Principle for advanced conduction of phase current
实际应用中,由于梯形气隙磁通分布的斜边区域有限,所以电流超前导通方式的调速范围扩展能力不如电励磁直流电机的磁场调节方式。同时,电流有效值随负载变化的情况在高速时受超前导通角的影响较大,一般超前导通角越大,电流有效值越大。较大的相电流会产生较大的平均转矩,所以相应的电机转速也较高。考虑到电机运行对连续工作电流的限制,超前导通角一般不宜超过30º电角度。
7 无刷直流电机的应用与发展
7.1 应用现状
7.1.1 汽车用无刷直流电机
一辆汽车内部通常包括几十到上百台电机,随着汽车向节能和环保方向的快速发展,无刷直流电机在汽车中具有很好的应用前景。电机除了可作为汽车驱动的核心部件外,还可用在汽车空调、雨刮器、电动车门、安全气囊、电动座椅等驱动上。同时,在纯电动汽车、混合动力汽车等驱动中,无刷直流电机也得到了广泛应用。
7.1.2 航空航天用无刷直流电机
无刷直流电机在航空航天中的典型应用有机械臂控制、陀螺仪与舵机驱动等,一般要求其具有良好的高速控制精度和动态响应能力,所以相应系统均通过闭环速度反馈进行控制,且大多采用先进控制算法。部分航空航天用无刷直流电机,如高速离心泵和高速摄像枪所用电机的转速能达到每分钟几万转,需考虑高速旋转时对电机机械和电气性能的特殊要求及其解决方法。另外,航空航天用电源的电压等级和频率大小也与通用电源区别较大,因此对应的电机控制系统还须考虑整流和变频驱动等电路的特殊性,如冗余、可靠性等问题。
7.1.3 无刷直流电机在家用电器中的应用
近年来,家用电器电子驱动电机以每年约30%的增幅发展,家用电器正朝着节能、低噪声、智能化和高可靠性方向发展。
“家庭农场、农民合作社等新型农业经营主体获得财政资金后,需向贫困户发放股权证。”石柱县财政局田晟副局长说,“根据《实施方案》,农业经营主体、农村集体经济组织和贫困户的持股比例,分别占财政补助资金的50%、10%、40%,项目存续期为5年。在这期间,农业经营主体需每年按持股金额的8%给贫困户实行固定分红,同时应根据财政补助资金产生效益的40%,向农村集体经济组织和贫困户实行效益分红。若农业经营主体因财务制度不健全等原因导致年终效益无法核实的,也应按不低于持股金额的4%进行效益分红。
变频空调的兴起使得无刷直流电机在空调驱动中的市场份额正逐步提高。为了节约成本和提高变频空调压缩机控制系统的稳定性,空调压缩机中宜采用无位置传感器控制方式,实际证明采用无位置传感器控制后,不但系统体积得到减小,而且系统效率也得到了提高。
盘式无刷直流电机(单定子或双定子结构)在VCD、DVD等家用电器的主轴驱动中也应用广泛。
电动自行车用无刷直流电机大多采用多极、外转子结构,其技术更是成熟。纳米技术的使用,将进一步促进电动自行车用无刷直流电机的发展,从效率、舒适度和稳定性等各方面提高电动自行车的整体性能。
同时,吸尘器、搅拌机、电吹风机、摄像机和家用电风扇等其他家用电器也正在逐步采用无刷直流电机代替先前使用较多的直流电机、单相异步电机和变压变频(VVVF)驱动式异步电机。
7.1.4 无刷直流电机在办公自动化领域的应用
计算机外围设备和办公自动化设备用电机,绝大部分为先进制造技术和新兴微电子技术相结合的高档精密电机,是技术密集化产品。在硬盘驱动器、光盘驱动器和软盘驱动器用的主轴电机,以及数码相机、激光打印机、复印机、传真机、录音机、LD影碟机和碎纸机等办公设备的驱动中,无刷直流电机已有很好的应用。
7.1.5 无刷直流电机在其他工业上的应用
目前,在民用和军用的机器人和机械臂驱动等应用中,无刷直流电机所占比例较大。大功率的无刷直流电机在低速、环境恶劣和有一定调速性能要求的场合也有着很好的应用前景,如无齿轮曳引机电梯驱动、抽水蓄能、钢厂轧机传动等,具有调速动态响应快、跟踪误差小、静差率小和调速范围宽等特点。除以上所涉及的应用场合,已经实用化的无刷直流电机应用领域还包括医疗器械、纺织机械、印刷机械和数控机床等行业。
7.2 发展趋势
7.2.1 小型化与集成化
微机电系统(MEMS)技术的发展将使电机控制系统朝控制电路和传感器高度集成化的方向发展,可使无刷直流电机控制系统更加简单而可靠。控制器与电机二者融为一体,使无刷直流电机与电子技术结合得更紧密,产品的附加值更高,整个控制系统也将朝低成本、小型化、集成化方向发展。
7.2.2 控制器全数字化
高速微处理器及高密度可编程逻辑器件的出现,为电机控制性能的提高提供了可靠的保证。采用单片机或 DSP等芯片来实现无刷直流电机的智能控制、间接位置检测,并替代传统的PID模拟电路、信号处理电路和逻辑判断电路等,实现控制器的接口通用化和数字化是今后的发展趋势之一,这将进一步减少系统硬件电路的体积、提高系统的可靠性和效率。
7.2.3 绿色PWM控制及其高效化
低噪声和高效率是电机控制系统追求的两大目标。为了利于人的身体健康,无刷直流电机宜使控制的开关频率达几十kHz以上,从而改善电磁噪声和电流波形。同时,利用新型功率变换器、软开关控制等来降低开关损耗及其对电源的污染率、增加开关寿命、并保证系统效率不变或提高的前提下,提高驱动电路的开关频率可实现电机控制系统的绿色PWM控制[21,44]。而在器件开关频率受限条件下,则采用新的调制模式也是未来研究的方向之一。
7.2.4 结构新型化
目前,市场上已涌现出多种新型无刷直流电机:无槽式与无铁心式电机、轴向磁场盘式电机、无刷直流力矩电机、无刷直流直线电机、无刷直流有限转角电机、低惯量无刷直流电机、无刷直流平面电机和无刷直流球形电机等[45-48]。随着新型导电、导磁和绝缘材料的出现,从本体上对电机进行优化设计以提高无刷直流电机的性能,将是今后发展的一个重要方向。同时,与材料科学密不可分的粘结永磁、永磁材料定向和充磁等加工技术也亟需发展。
7.2.5 控制先进化
无刷直流电机性能的改善可以通过电机本体优化设计及电力电子装置的控制来实现,也可利用各种先进的控制策略来完成。无刷直流电机控制系统是典型的非线性、多变量耦合系统,基于现代控制理论和智能控制理论的非线性控制方法,如模糊控制、神经网络控制、变结构控制、鲁棒控制、自适应控制等多种先进控制策略在无刷直流电机中的应用将进一步提高控制系统的性能。特别地,在单片机或DSP处理速度一定的情况下,应着力于各种控制算法的实用化研究,从而全面推进无刷直流电机控制系统朝小型化、数字化、智能化和高效节能的方向发展。
8 结论
本文对无刷直流电机控制中的关键技术进行了论述,剖析了该电机在设计与控制中存在的若干问题。对比国内外研究现状,宽速度调节范围内的无位置传感器控制方式的标准化、电机控制器的智能化及其与电机本体的一体化设计、低成本节能型驱动器的开发等将是未来研究的重点。同时,无刷直流电机结构优化设计、弱磁控制的扩速能力、转矩波动的抑制等仍是需要继续深入研究的内容。另外,如何采用新型的永磁材料代替稀土永磁,既设计出高效率的永磁无刷直流电机,又降低其对稀土永磁材料的依赖将是今后急需解决的重要课题。所有这些问题的解决,将进一步推进无刷直流电机在汽车、舰船、家用电器等行业以及国防和航空航天领域中的广泛应用,对我国节能降耗战略的实现具有重要意义。
[1]夏长亮. 无刷直流电机控制系统[M]. 北京: 科学出版社, 2009.
[2]Kenjo T, Nagamori S. Permanent magnet and brushless DC motors[M]. New York: Oxford University Press, 1985.
[3]夏长亮, 张茂华, 王迎发, 等. 永磁无刷直流电机直接转矩控制[J]. 中国电机工程学报, 2008, 28(6):104-109.
Xia Changliang, Zhang Maohua, Wang Yingfa, et al.The direct torque control for permanent magnet brushless DC motors[J]. Proceedings of the CSEE,2008, 28(6): 104-109.
[4]Xia Changliang, Guo Chen, Shi Tingna. A neural network identifier and fuzzy controller based algorithm for dynamic decoupling control of permanent magnet spherical motor[J]. IEEE Transactions on Industrial Electronics, 2010, 57(8):2868-2878.
[5]Xia Changliang. Permanent magnet brushless DC motor drives and controls[M]. Singapore: John &Wiley Inc, 2012.
[6]郭鸿浩, 周波, 左广杰, 等. 无刷直流电机转矩观测与电感自适应辨识[J]. 中国电机工程学报, 2011,31(33): 151-158.
Guo Honghao, Zhou Bo, Zuo Guangjie, et al. Torque estimation and adaptive inductance identification for a brushless DC motor[J]. Proceedings of the CSEE,2011, 31(33): 151-158.
[7]邹继斌, 李建军, 徐永向, 等. 驱动方式对永磁无刷直流电机损耗的影响[J]. 电工技术学报, 2011,26(9): 43-47.
Zou Jibin, Li Jianjun, Xu Yongxiang, et al. Influences of drive strategies on the loss of permanent magnet brushless direct current motor[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 43-47.
[8]韦鲲, 胡长生, 张仲超. 一种新的消除无刷直流电机非导通相续流的 PWM调制方式[J]. 中国电机工程学报, 2005, 25(7): 104-1308.
Wei kun, Hu Changshen, Zhang zhongchao. A novel PWM scheme to eliminate the diode freewheeling of the inactive phase in BLDC motor[J]. Proceedings of the CSEE, 2005, 25(7): 104-1308.
[9]揭贵生, 马伟明, 耿建明, 等. 无刷直流电机的一种新型转矩与效率优化控制[J]. 中国电机工程学报,2006, 24(6): 131-136.
Jie Guisheng, Ma Weiming, Geng Jianming, et al. A new optimizing control method of torque and efficiency for trapezoidal BLDCM[J]. Proceedings of the CSEE, 2006, 24(6): 131-136.
[10]唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2006.
[11]叶金虎. 无刷直流电动机[M]. 北京: 科学出版社,1982.
[12]刘刚, 王志强, 房建成, 著. 永磁无刷直流电机控制技术与应用[M]. 北京: 机械工业出版社, 2008.
[13]Zhu L, Jiang S Z, Jiang J Z, et al. A new simplex wave winding permanent-magnet brushless DC machine[J]. IEEE Transactions on Magnetics, 2011,47(1): 252-259.
[14]Guo Y G, Zhu J G, Watterson P A, et al. Improved design and performance analysis of a claw pole permanent magnet SMC motor with sensorless brushless DC drive[C]. Fifth International Conference on Power Electronics and Drive Systems, 2003:704-709.
[15]Walter N A, Stephen L H. Electric motor control[M].Australia: Thomson/Delmar Learning, 2003.
[16]Pillay P, Krishnan R. Application characteristics of permanent magnet synchronous and brushless DC motors for servo drives[J]. IEEE Transactions on Industry Application, 1991, 27(5): 986-996.
[17]Xia Changliang, Li Zhiqiang, Shi Tingna. A control strategy for four-switch three-phase brushless DC motor using single current sensor[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 2058- 2066.
[18]李志强. 无刷直流电机无位置传感器控制及四开关逆变器控制研究[D]. 天津: 天津大学, 2009.
[19]夏长亮, 刘均华, 俞卫, 等. 基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J]. 中国电机工程学报, 2006, 26(20): 139-143.
Xia Changliang, Liu Junhua, Yu Wei, et al. Variable structure control of BLDCM based on extended state observer[J]. Proceedings of the CSEE, 2006, 26(20):139-143.
[20]夏长亮, 文德, 王娟. 基于自适应人工神经网络的无刷直流电机换相转矩波动抑制新方法[J]. 中国电机工程学报, 2002, 22(1): 54-58.
Xia Changliang, Wen De, Wang Juan. A new approach of minimizing commutation torque ripple for brushless DC motor based on adaptive ANN[J].Proceedings of the CSEE, 2002, 22(1): 54-58.
[21]Shi Tingna, Guo Yuntao, Song Peng, et al. A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J].IEEE Transactions on Industrial Electronics, 2010,57(10): 3483-3490.
[22]夏长亮, 李正军, 杨荣, 等. 基于自抗扰控制器的无刷直流电机控制系统[J]. 中国电机工程学报,2005, 25(2): 82-86.
Xia Changliang, Li zhengjun, Yang Rong, et al.Control system of brushless DC motor based on active-disturbance rejection controller[J]. Proceedings of the CSEE, 2005, 25(2): 82-86.
[23]Liu Y, Zhu Z Q, Howe D. Commutationtorque-ripple minimization in direct-torque-controlled PM brushless DC drives[J]. IEEE Transactions on Industry Applications, 2005, 43(4): 1012-1021.
[24]谭博, 马瑞卿, 刘卫国. 一种永磁无刷直流电动舵机四象限控制[J]. 电工技术学报, 2011, 26(9): 73-79.
Tan Bo, Ma Ruiqing, Liu Weiguo. A four-quadrant control for permanent magnet brushless DC electric actuator[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 73-79.
[25]陈炜. 永磁无刷直流电机换相转矩脉动抑制技术研究[D]. 天津: 天津大学, 2006.
[26]张相军, 陈伯时. 无刷直流电机控制系统中 PWM调制方式对换相转矩脉动的影响[J]. 电机与控制学报, 2003, 7(2): 87-91.
Zhang Xiangjun, Chen Boshi. The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system[J]. Electric Machines and Control, 2003, 7(2): 87-91.
[27]夏长亮, 俞卫, 李志强. 永磁无刷直流电机转矩波动的自抗扰控制[J]. 中国电机工程学报, 2006,26(24): 137-142.
Xia Changliang, Yu Wei, Li Zhiqiang. Torque ripple reduction of PM brushless DC motors based on auto-disturbances-rejection controller[J]. Proceedings of the CSEE, 2006, 26(24): 137-142.
[28]史婷娜, 田洋, 夏长亮. 基于自适应小波网络的永磁无刷直流电机直接电压控制[J]. 电工技术学报,2007, 22(9): 74-79.
Shi Tingna, Tian Yang, Xia Changliang. Direct control of voltage based on adaptive wavelet neural network for PM brushless DC motors[J]. Transactions of China Electrotechnical Society, 2007, 22(9): 74-79.
[29]夏长亮, 文德, 范娟, 等. 基于 RBF神经网络的无刷直流电机无位置传感器控制[J]. 电工技术学报,2002, 17(3): 26-29, 76.
Xia Changliang, Wen De, Fan Juan, et al. Based on RBF neural network position sensorless control for brushless DC motors[J]. Transactions of China Electrotechnical Society, 2002, 17(3): 26-29, 76.
[30]Xia Changliang, Fang Hongwei, Chen Wei, et al. Ant colony algorithm based fuzzy control for a brushless DC motor[C]. IEEE Proceedings of the World Congress on Intelligent Control and Automation,2006: 6498-6502.
[31]夏长亮, 杨晓军, 史婷娜, 等. 基于扰动观测器的无刷直流电机无位置传感器控制[J]. 电工技术学报,2002, 17(6): 25-28.
Xia Changliang, Yang Xiaojun, Shi Tingna, et al.Position sensorless control of brushless DC motor based on the disturbance observer[J]. Transactions of China Electrotechnical Society, 2002, 17(6): 25-28.
[32]Li Y, Zhu Z Q, Howe D, et al. Improved rotor-position estimation by signal injection in brushless AC motors, accounting for cross-coupling magnetic saturation[J]. IEEE Transactions on Industry Applications, 2007, 45(5): 1843-1850.
[33]Shen J X, Zhu Z Q, Howe D. Sensorless fluxweakening control of permanent-magnet brushless machines using third harmonic back EMF[J]. IEEE Transactions on Industry Applications, 2004, 40(6):1629-1636.
[34]林明耀, 刘文勇, 周谷庆. 无位置传感器无刷直流电机短时脉冲定位加速方法[J]. 电工技术学报,2011, 26(9): 80-86.
Lin Mingyao, Liu Wenyong, Zhou Guqing. A location and acceleration method of sensorless brushless DC motor utilizing short voltage pulse[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 80-86.
[35]王迎发, 夏长亮, 陈炜. 基于模糊规则的无刷直流电机起动策略[J]. 中国电机工程学报, 2009, 29(30):98-103.
Wang Yingfa, Xia Changliang, Chen Wei. Startup strategy for brushless DC motor based on fuzzy rules[J]. Proceedings of the CSEE, 2009, 29(30): 98-103.
[36]史婷娜, 吴曙光, 方攸同, 等. 无位置传感器永磁无刷直流电机的起动控制研究[J]. 中国电机工程学报, 2009, 29(6): 111-116.
Shi Tingna, Wu Shuguang, Fang Youtong, et al.Reasearch on sensorless PM brushless DC motor starting control[J]. Proceedings of the CSEE, 2009,29(6): 111-116.
[37]夏长亮, 刘丹, 王迎发, 等. 基于模糊规则的无刷直流电机免疫 PID控制[J]. 电工技术学报, 2007,22(9): 68-73.
Xia Changliang, Liu Dan, Wang Yingfa, et al. Control of brushless DC motors using fuzzy set based immune feedback PID controller[J]. Transactions of China Electrotechnical Society, 2007, 22(9): 68-73.
[38]夏长亮, 王娟, 史婷娜, 等. 基于自适应径向基函数神经网络的无刷直流电机直接电流控制[J]. 中国电机工程学报, 2003, 23(6): 123-127.
Xia Changliang, Wang Juan, Shi Tingna, et al. Direct control of currents based on adaptive RBF neural network for brushless DC motors[J]. Proceedings of the CSEE, 2003, 23(6): 123-127.
[39]夏长亮, 郭培健, 史婷娜, 等. 基于模糊遗传算法的无刷直流电机自适应控制[J]. 中国电机工程学报,2005, 25(11): 129-133.
Xia Changliang, Guo Peijian, Shi Tingna, et al.Control of brushless DC motor using genetic algorithm based fuzzy controller[J]. Proceedings of the CSEE, 2005, 25(11): 129-133.
[40]夏长亮, 李志强, 王明超, 等. 基于 RBF神经网络在线辨识的永磁无刷直流电机单神经元PID模型参考自适应控制[J]. 电工技术学报, 2005, 20(11): 65-69.
Xia Changliang, Li Zhiqiang, Wang Mingchao, et al.Single neuron PID model reference adaptive control for PM brushless DC motors based on RBF neural network on-Line identification[J]. Transactions of China Electrotechnical Society, 2005, 20(11): 65-69.
[41]方红伟, 夏长亮, 方攸同, 等. 无刷直流电动机二阶离散平滑滤波器位置伺服控制[J]. 中国电机工程学报, 2009, 29(3): 65-70.
Fang Hongwei, Xia Changliang, Fang Youtong, et al.Position servo control of brushless DC motor based on the second discrete filter[J]. Proceedings of the CSEE, 2009, 29(3): 65-70.
[42]Qi G, Chen J T, Zhu Z Q, et al. Influence of skew and cross-coupling on flux-weakening performance of permanent-magnet brushless AC machines[J]. IEEE Transactions on Magnetics, 2009, 45(5): 2110-2117.
[43]Chen C H, Cheng M Y. Implementation of a highly reliable hybrid electric scooter drive[J]. IEEE Transactions on Industrial Electronics, 2007, 54(5):2462-2473.
[44]吴红飞, 邢岩, 胡海兵, 等. 副边调整式三端口半桥 DC-DC 变换器[J]. 中国电机工程学报, 2011,31(30): 1-6.Wu Hongfei, Xing Yan, Hu Haibing, et al. Three-port half-bridge DC-DC converters with post regulation scheme[J]. Proceedings of the CSEE, 2011, 31(30):1-6.
[45]Shen Y, Zhu Z Q. Analytical prediction of optimal split ratio for fractional-slot external rotor PM brushless machines[J]. IEEE Transactions on Magnetics, 2011, 47(10): 4187-4190.
[46]王巍, 郭宏, 邢伟, 等. 电气/机械混合四余度无刷直流力矩电动机控制系统[J]. 中国电机工程学报,2010, 30(6): 100-104.
Wang Wei, Guo Hong, Xing Wei, et al. A control system for electrical/mechanical hybrid fourredundancy brushless DC torque motor[J].Proceedings of the CSEE, 2010, 30(6): 100-104.
[47]王凤翔, 王继强, 孔志国. 具有被动式磁力轴承的无刷直流电机研究[J]. 中国电机工程学报, 2004,24(5): 90-95.
Wang Fengxiang, Wang Jiqiang, Kong Zhiguo. Study on brushless DC motor with passive magnetic bearings[J]. Proceedings of the CSEE, 2004, 24(5):90-95.
[48]Xia Changliang, Song Peng, Li Hongfeng, et al.Research on torque calculation method of permanent-magnet spherical motor based on the finite-element method[J]. IEEE Transactions on Magnetics, 2009, 45(4): 2015-2022.
