基于SimMechancis的舰炮柔性身管建模及控制方法研究
2011-06-21李克玉田福庆
李克玉,田福庆
(海军工程大学 兵器工程系,湖北 武汉 430033)
现代小口径舰炮,身管具有较大的长径比,因自重而产生一定的静弯曲[1],并且在发射时,一般处于高速跟踪状态,转动惯量及负载力矩变化大等非线性因素,常常使身管产生弯曲振动,严重降低射击精度。文献[2-3]在建立俯仰传动系统模型的基础上,提出了将火炮身管分为两段由扭矩和摩擦力连接的两段,以模拟身管的弹性振动,但该模型过于简单,只是初步实现了身管运动时的转动惯量的变化,并且在火炮俯仰运动时只模拟了俯仰方向上的振动,没有考虑到身管在三维空间中的振动。笔者应用 Matlab/SimMechanics软件对舰炮的伺服传动系统和火炮身管在三维空间中的建模,并分析了身管振动带来的控制误差,并比较了基于炮口角位移负反馈的控制方法和基于炮耳轴角位移负反馈的控制方法,基于常规PID控制器验证了前者对控制精度改善的有效性。
1 模型建立
1.1 舰炮柔性身管建模
1.1.1 建模理论
由于火炮身管的弯曲振动控制要用计算机控制系统来实现,因此应尽量使所建立的运动方程简单和易于离散化,故选择以多体系统建立动力学方程的方法。文献[4]中较为系统地论述了以多体系统建立身管柔性动力学方程的方法,这里综合这几种方法对柔性身管进行建模。
这里以某舰炮为例,其身管的构型,包括各段长度li,横截面积Ai,对质心的转动惯量Ii,以及材料的弹性模量E、密度ρ等几何物理特性均可以得到。将火炮身管依照截面尺寸划分为5个单元体,各单元体间的连接简化为弯曲弹簧、弯曲阻尼和光滑铰链(消除沿身管方向的位移),其力学模型如图1所示。

若将身管视为弹性体,考虑身管的弯曲振动对炮口位移的影响,则火炮是一个无限自由度系统。从振动理论可知,系统的振动响应特性主要是由其低阶模态决定的,因此可以用身管的低阶模型来近似,其数学模型的简化形式为:

式中:M,C,K分别为火炮身管的广义质量、阻尼和刚度矩阵;Mu,Mf,MF分别为控制力矩和身管摇摆作用下的自身惯性力矩和射击载荷引起的作用力矩。
对火炮身管建立可变形体动力学方程,设各单元转角为系统的广义坐标,即:

则雅可比矩阵J=(jki)与˙J=(˙jki)的矩阵元素值为:

式中:
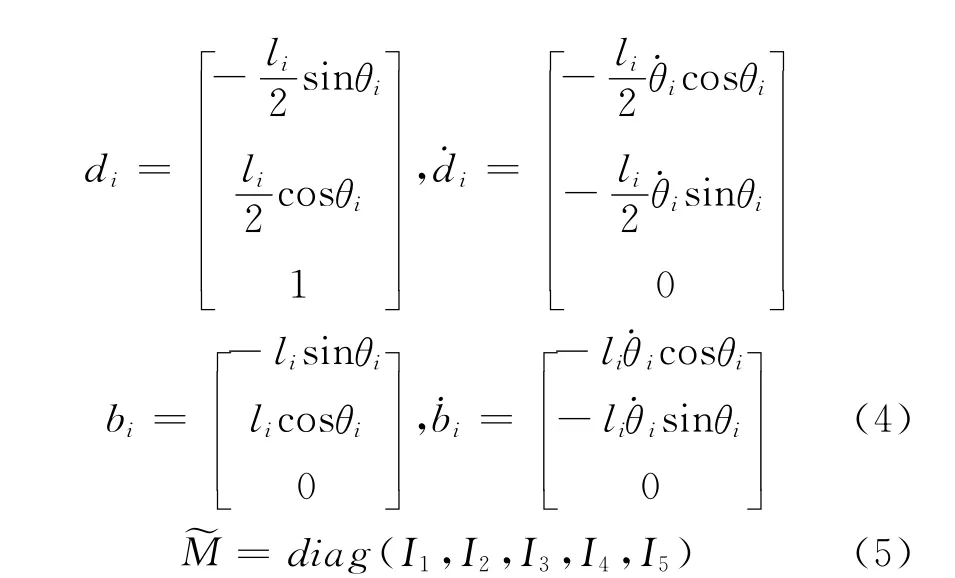
系统质量矩阵为:

系统刚度矩阵为:
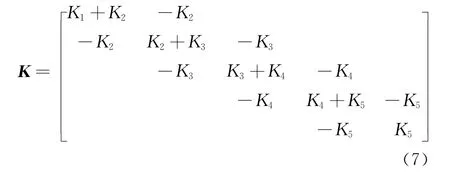
这里,

系统阻尼矩阵为:

在小角度时,矩阵C由结构阻尼确定,简化为比例阻尼形式。对多自由度模型,在小角度时,令sinθi≈0,cosθi≈1,仿真模型中,各参数在 Matlab工作空间中生成向量文件。
1.1.2 柔性身管建模的 Matlab/Sim-Mechanics实现
SimMechanics是 MATLAB6.0以上版本中,新增的一个工具箱,它可以对各种运动副连接的刚体进行建模与仿真,实现对机构系统进行分析与设计的目的。SimMechnics提供了一个可以在Matlab/Simulink环境下直接使用的模块集,可以将表示各种机构的模块在普通Simulink窗口中绘制出来,并通过它自己提供的检测与驱动模块和普通Simulink模块连接起来,获得整个系统的仿真结果[5]。
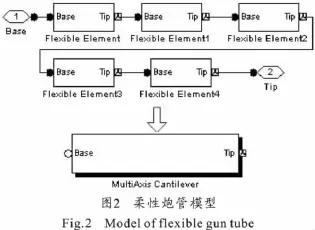
如图2所示调用Simulink的Library模块库中的Ports &Subsystems模块建立三维悬臂梁,并且封装,命名为MultiAxis Cantilever。每一个单元体的具体数据,包括材料,密度,横截面积,长度,质心位置,转动惯量等在Matlab工作空间中生成向量,直接链接到MultiAxis Cantilever模块中。
1.1.3 建立舰炮俯仰伺服传动系统
为简化模型,便于研究,将减速器的传动链形式建为1个二级圆柱直齿轮传动链,如图3所示,多级齿轮建模方法与该方法类似。
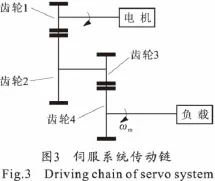
在不考虑齿轮传动机构中各轴的弹性的条件下,齿轮2和3及其连接轴在本文中视为同一刚体,在建模时由1个Body模块表示,两个齿轮副由Gear Constraint模块建立,Body3模块表示的是高低齿弧,与已经建立好的柔性身管模型MultiAxis Cant-ilever(即负载)刚性连接在一起,共同构成传动链的负载输出。具体参数见表1。

表1 仿真参数Tab.1 Parameters of simulation
图4为系统在阶跃信号输入和常规PID控制器控制下的炮耳轴处的角位移为负反馈的系统仿真图。

2 仿真分析
2.1 基于炮耳轴角位移负反馈信号控制方法的仿真分析
将阶跃信号模块(即图中的step模块)中的step time设定为1,Final value设定为10,PID控制器的Kp=15,Ki=0.5,Kd=3时,运行仿真模型,舰炮身管在绕x轴,绕y轴,绕z轴转动的角速度如图5~图7所示,身管在炮耳轴处的角位移和炮口的角位移,以及它们之间的误差如图9所示。从这些图可以看出,舰炮身管的振动方向是三维的,不仅仅是在绕z轴(即俯仰方向)上的;由于身管的振动,使炮耳轴处角位移和炮口角位移在随动过程中有着较大的误差,使基于炮耳轴角位移的负反馈控制策略无法精确控制炮口的角位移,严重影响了射击精度。
2.2 基于炮口角位移负反馈信号控制策略的仿真分析
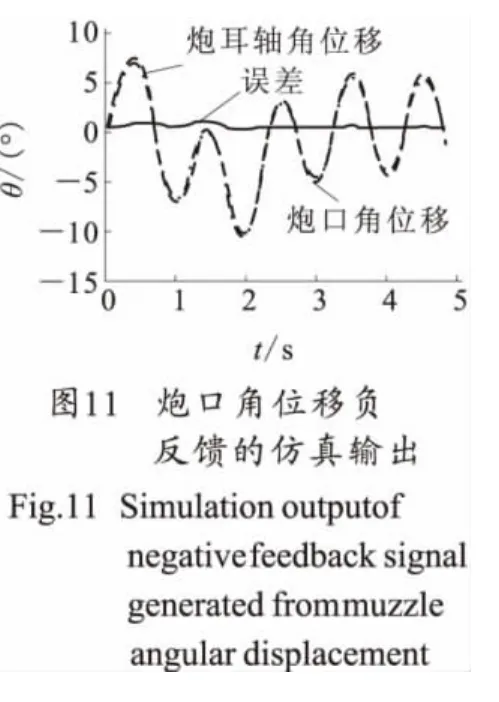
将在SimMechancis中的系统模型封装为System模块,再将炮口角位移信号作为负反馈信号,如图9所示。以上述相同阶跃输入和PID控制器条件下,仿真结果如图10所示。将输入信号换为幅值为30,频率为5的正弦信号,仿真结果如图11所示。

由图9和图10可以看出基于炮口角位移负反馈信号的控制方法使炮口的控制精度大为改善,但由于常规PID控制器不能较好地适应控制非线性因素,身管依然存在着小幅振动;在跟踪正弦信号时,身管第1次由负方向最大角度,向正方向转动时,由于惯性力和转动惯量的急剧变化,使电机无法快速适应,因此存在较大误差。若要彻底消除上述误差,则需要重新设计非线性的控制器。

3 结 论
1)应用Matlab/SimMechancis强大的计算能力,在控制系统中对舰炮柔性身管的建模,实现了在俯仰随动过程中身管在三维空间中振动的仿真。
2)对比分析了基于炮耳轴角位移负反馈和基于炮口角位移负反馈这两种控制方法对控制精度的影响,验证了后者对于提高随动控制精度的有效性。
3)舰炮在俯仰方向上进行正弦信号跟踪时,初期由于转动惯量及负载力矩剧烈变化,使得控制误差较大。
4)要在实际的控制系统中实现对炮口高频振动角位移的控制,主要存在的问题是:传统的测量装置对炮口采集数据的及时性和准确性不够;控制器根据炮口高频振动而产生的控制命令在现有伺服系统的机械传动装置中不能得到快速完全的执行。
(References)
[1]殷军辉,秦俊奇,马春庭,等.小口径高射速火炮身管弯曲计算仿真系统设计[J].兵工自动化,2007,26(12):33-36.YIN Jun-hui,QIN Jun-qi,MA Chun-ting,et al.Simulation system design of barrel’s flexure calculation for minor-caliber rapid-firing Gun[J].Ordnance Industry Automation,2007,26(12):33-36.
[2]PURDY D J.An investigation into the modelling and control of flexible bodies[D].Thesis,Granfield University(RMCS),England,1994.
[3]PURDY D J.Main battle bank stabilization ratio enhancement using hull rate feedforward[J].Journal of Battlefield Technology,1994,2(1):263-267.
[4]殷学纲,蹇开林,黄尚廉.运动柔性梁振动主动控制的有限段法分析[J].应用力学学报,1998,15(4):22-26.YIN Xue-gang,JIAN Kai-lin,HANG Shang-lian.A finite segment anlaysis of active vibration control of flexible beam with motion[J].Chinese Journal of Applied Mechanics,1998,15(4):22-26.
[5]薛定宇,陈阳泉.基于 MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.XUE Ding-yu,CHEN Yang-quan.Simulation technology and application of system based on MATLAB/Simulink[M].Beijing:Tsinghua University Press,2002.
