大口径线膛炮炮口振动位移测量方法
2021-05-13钞红晓李世立雷强任俊龙
钞红晓,李世立,雷强,任俊龙
(1.西北机电工程研究所,陕西 咸阳 712099;2.重庆大学 光电工程学院,重庆 400030)
对于大口径火炮而言,火炮密集度是靶场火炮验收的重要指标,关系着火炮研制的成功与否,而炮口振动位移是影响大口径火炮射击密集度的关键特征量[1-3],是大口径火炮设计的重要参数,也是检验火炮性能的重要指标。大口径火炮炮口振动是一个非常复杂的物理过程,与火炮身管、弹丸、炮塔、底盘等火炮构件的综合响应过程有关。通过试验测试准确获取炮口振动位移参数,可为改进和优化火炮构件、建立和完善火炮发射系统整体仿真模型等提供实测数据和参考。
目前测试线膛炮炮口振动位移的方法主要分为接触与非接触两大类。接触测试法主要是将加速度计安装在炮口,采用对所测炮口的振动加速度信号进行积分得到炮口位移[4]。虽然该方法可以方便地测试出高仰角火炮射击状态下的炮口振动位移,但是由于该方法不是直接测试炮口振动位移量,信号积分过程中加速度计的横向振动和干扰信号会对积分结果产生较大影响,使测试结果产生一定的误差。
炮口振动位移非接触测试的方法较多[5-6],诸如:基于电涡流位移传感器、光电位移跟随器、光杠杆原理的激光CCD成像系统、位置敏感探测器(position sensitive detector,PSD),以及高速摄影法测量等,这些方法各有优缺点,其中电涡流位移传感器虽对炮口焰和烟雾不敏感,但是存在位移量程过小的缺陷,一般仅适用于小口径火炮炮口上下、左右振动位移测试。光电位移跟随器的位移测量精度易受天气及光线等因素影响,且测试系统的观测坐标系与身管指向的几何关系难以精确标定,导致测试系统精度低。基于光杠杆原理的激光CCD成像系统和PSD探测传感器,虽然测试距离增大,可用于炮口大位移量测试,但是系统架设和操作比较麻烦,坐标系转换复杂,而且由于炮口焰的干扰,测量精度不高。高速摄像法是近年来应用比较广泛的非接触测试方法,具有测试方法灵活,环境适应能力较强,测量范围大、测量精度高、测量安全距离远,可用于测量炮口三维振动的位移。针对高速摄像法测量炮口振动位移的研究,王宝元等利用高速摄像获得了某火炮弹丸出炮口时炮口上下振动位移量[7],赵刚采用基于高速摄像双目成像法获取了大口径炮口上下、左右、前后三维振动位移[8],而文献[9]详细介绍了高速摄像在测试坦克炮炮口振动位移时,高速摄像测试系统所具有的优势及位移分辨率。虽然这些方法获得了炮口一维或三维振动的位移,但均假设炮口在火炮发射期间,只做平面运动,不发生扭转,未考虑炮口扭转对测量精度的影响,因此测量精度较低。
笔者以某155 mm火炮为研究对象,提出了一种利用高速摄像法测量水平射击时炮口振动的位移参数,考虑了火炮射击时身管扭转对炮口振动测量的影响,有效提高了炮口振动的测量精度。
1 线膛炮炮口振动位移特性
炮口振动位移是指火炮射击时,炮口产生的垂直于火炮身管指向并沿俯仰方向和方位方向的位移。大口径火炮发射时,常伴随高温(约3 000 ℃)、高压(约350 MPa)、高速(约1 000 m/s)、高负载(约13 000g)等过程,造成炮口振动位移测试环境十分严酷,而线膛炮炮口振动位移又具有发生时间短(约10 ms),量值小(约1 mm),不易从炮口多维运动中分离出来等特点,导致许多测试方法不能准确和稳定地测量出炮口振动的位移。
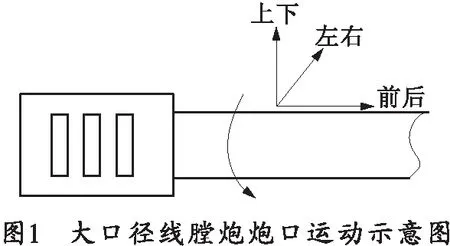
特别地,对于线膛炮而言,火炮发射时,由于弹丸与膛线的相互作用,使炮口及身管发生小范围的扭转。因此大口径线膛炮发射时,炮口不仅做上下、左右、前后运动,而且炮口会随身管发生扭转运动。大口径线膛炮炮口运动示意图如图1所示。
2 高速摄像测量炮口振动位移原理
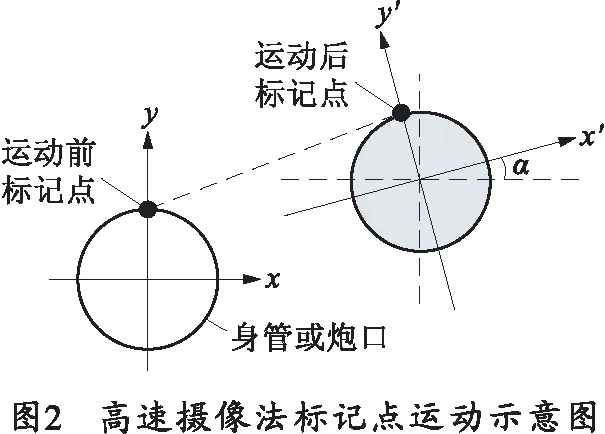
高速摄像测量炮口振动位移是在炮口端面粘贴便于图像识别的专用标记点,采用高速摄像机拍摄弹丸在膛内运动期间炮口标记点的运动图像,通过数字图像处理技术对所拍摄的炮口标记点在图像中的位置进行跟踪计算,获得标记点(炮口)的位移量。高速摄像法标记点运动示意图如图2所示。
高速摄像测量炮口振动位移是利用特征像素点(即标记点)在图像中的位置变化来计算炮口的位移的。当高速摄像机的焦距与拍摄物体距离确定之后,即物距、像距确定之后,图像传感器一个像素所代表的物空间的位移当量就随之确定。为了确定被测物体运动的位移量,可利用数字图像处理软件对高速摄像机拍摄的多幅数字图像进行相关计算获得。由于相机架设的位置远离炮口处,炮口振动位移是小于一个位移当量,为了提高位移测量的精度,需要采用亚像素定位算法,即图像标记点的位移小于一个像素时的位移计算,如图3所示。
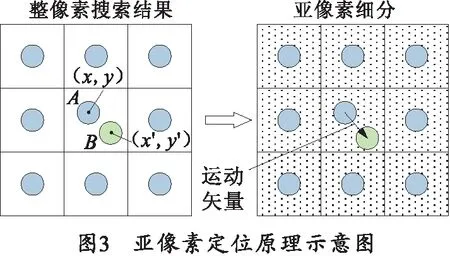
从图3可以看出,在运动前的图像f(x,y)中,取以标记点(x,y)为中心、半径为r的圆形计算子区A作为模板,A在运动着的目标图像g(x,y)中移动,并按某一相关函数来进行计算,寻找与模板的相关系数为极值的子区B,B是以(x′,y′)为中心、半径同为r的圆形区域,由中心点(x,y)和(x′,y′)来确定目标的位移量。
文献[9]指出,基于亚像素定位的高速摄像位移测量系统,在实验室环境下具有0.02像素的亚像素分辨能力。因此在大口径线膛炮炮口振动位移测试中,高速摄像机只要选择好合适的机位、拍摄速度以及成像镜头,利用高精度的亚像素定位算法,就能控制测量位移精度。
3 水平射击时炮口振动位移测试方法
在155 mm火炮水平射击状态下,在火炮制退器环形前端面的上、下、左、右分别粘贴4个圆形标记点1~4,用游标卡尺分别测量上下及左右两标记点之间的距离,作为图像计算标尺。将大小约50 cm×50 cm的平面镜利用钢制三角架固定于炮口正前方10 m左右,调整平面镜中心与火炮轴线等高。将高速摄像机利用通用三角架和高精度云台架设在炮口侧方15 m左右远,调节平面镜的姿态,使炮口经平面镜反射清晰成像在高速摄像中。炮口振动位移测试如图4所示。
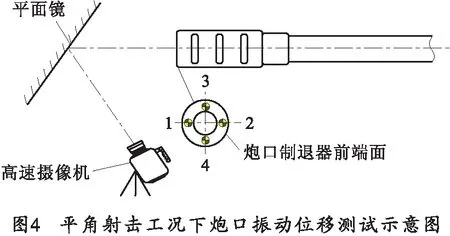
从图4中可以看出,火炮射击时标记点1、2、3、4不仅会发生上下、左右平动,还会发生扭转运动。假设炮口顺时针扭转,通过理论分析,标记点1的x方向位移由炮口振动的x方向位移和炮口扭转产生的x方向位移xz组成,即x1=x-xz.同理,标记点2的x方向位移x2=x+xz,标记点3的y方向位移由炮口振动的y方向位移和炮口扭转产生的y方向位移yz组成,即y3=y-yz.同理,标记点4的y方向位移y4=y+yz.如果直接利用高速摄像捕获标记点x、y方向的位移作为炮口振动位移,则测试结果会因为炮口的扭转产生较大误差。因此需要消除扭转对标记点位移产生的影响,这样得到的位移量才真正是炮口振动引起的位移。大口径火炮发射时,因为膛线的作用,沿弹带周围均匀分布同一旋向的作用力,促使该处身管发生扭转[10],炮口作为身管的一部分,假设也会发生均匀扭住,扭转中心为身管的轴心,当标记点1、2之间的连线和标记点3、4之间的连线将炮口端面圆等分时,标记点1和标记点2的扭转位移相等、方向相反,标记点3和标记点4的扭转位移相等、方向相反,则有
(1)
通过式(1)可以知道,该方法不仅可以消除扭转作用对测试结果带来的影响,同时可以利用高速摄像在炮口振动位移测量中的优势,提高其测试精度。具体操作需注意以下几点:
1)标记点粘贴需要尽量准确。可以在炮口前方正对炮口、近距离架设高速摄像机,通过调节高速摄像机远近位置,实时获取位移当量,可将像素点的精度控制在0.2 mm/像素,通过高速摄像反复观察,使标记点1和2粘贴在炮口端面横轴左右点位上,标记点3和4粘贴在炮口端面纵轴上下点位上。这样可以控制系统的炮口振动位移测量精度不大于0.1 mm.
2)尽量减小高速摄像机光轴经平面镜反射后不垂直于测量面(炮口运动平面)带来的测量误差。实际测试中,可以通过软件实时计算高速摄像机中炮口标记点间在图像上的距离,调整高速摄像机的位置和角度,使炮口各标记点间在图像上的距离相等。
4 现场标定
由于实际操作中,高速摄像机光轴经平面镜反射后不可能完全垂直于测量面,即测量面、平面镜面和高速摄像机光敏面之间存在一定夹角,因此需要事先对测试系统进行标定,以消除这种角度带来的影响。测试系统中平面反射镜的作用仅只是用于改变光线传播的方向,并不改变成像的性质,包括物距、像距、放大率等。因此位移测量几何关系可以简化如图5所示。
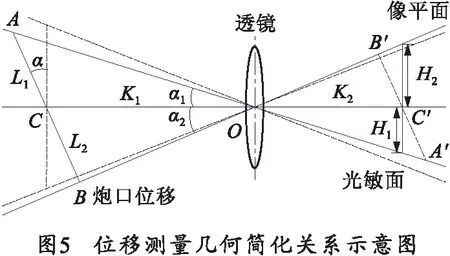
图5中AB为炮口位移,通过透镜成像于像平面上的A′B′.已知AB与铅垂面夹角为α,LAC=L1,LBC=L2,LOC=K1(物距),LOC′=K2(像距),图像放大率为M,设∠AOC=α1,LAO=S1,由余弦定理可得:
(2)
(3)
则,L1在光敏面上的位移为
H1=K2tanα1.
(4)
同理,在△BOC中,设∠BOC=α2,LBO=S2,由余弦定理可得
(5)
(6)
则,L2在光敏面上的位移为
H2=K2tanα2.
(7)
所以,炮口位移AB在高速摄像光敏面上的位移为
H=H1+H2,
(8)
则,该光敏位移对应的炮口虚拟位移为
L′=H/M.
(9)
由上述式(9)可见空间角α对炮口位移测量会产生一定影响。
虽然空间α角与测量位移大小有关,但是当α角一定时,测量平面上的位移与光敏面上的位移成线性关系,因此需要消除这种影响,可以通过现场标定的方法进行。标定示意如图6所示。
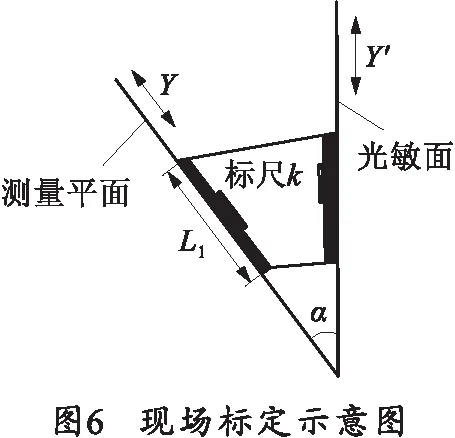
假如高速摄像光轴不垂直于测量面,测量平面上的距离标尺长度为k,标尺占用的像素为m,物体位移量L1占用的像素为n,则有
L1=kn/m.
(10)
从式(10)可以看出,只要知道位移当量k/m和物体运动位移所占像素n,就能得到测量面上的物体位移量。
现场标定的过程实际上就是获取位移当量的过程。高速摄像机标定如下:射击之前,先通过已架设好的高速摄像机拍摄事先已知道距离(标尺)的标记点1和2的图像,通过高速摄像机内部模型解算,获取位移当量。该过程通过数字图像处理软件自动完成,标定完成后可以进行试验。
获得位移当量后,再通过火炮射击时标志点位移变化的像素数,就可以得到物体在测试平面上的位移。这种方法可以消除高速摄像机光轴经平面镜后不垂直于炮口端面带来的x方向测量误差。同理,利用标记点3和4之间的距离标尺,可以消除y方向测试误差。
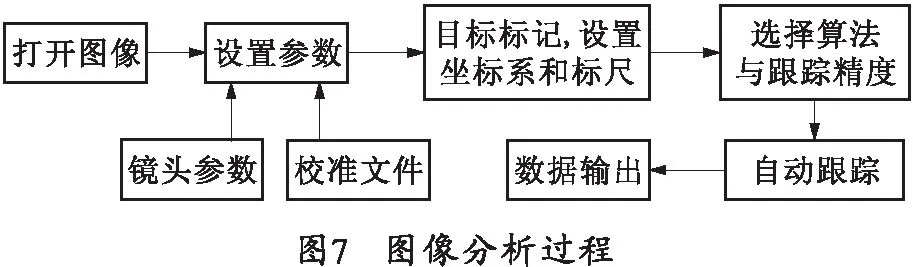
实际测试时,高速摄像机采用400 mm定焦镜头,帧频设置为10 000帧/s,曝光时间约为98 μs,图像处理软件可精确标定像机镜头和焦距,自动补偿镜头偏移和焦距变化。在分析高速摄像机所拍摄的图像序列时,将事先测量的距离标尺作为输入,将点1和点2之间连线作为x轴,点3和点4之间连线作为y轴,对图像中的特征点和标记点进行自动跟踪,计算其x、y方向位移。
5 在某155 mm火炮中应用
利用上述介绍的测试方法,进行了45倍口径155 mm火炮水平射击时炮口振动位移测试。图像分析过程如图7所示。在计算位移参量时,根据输出参量x位移方向和y位移方向不同,选用相应的距离标尺。
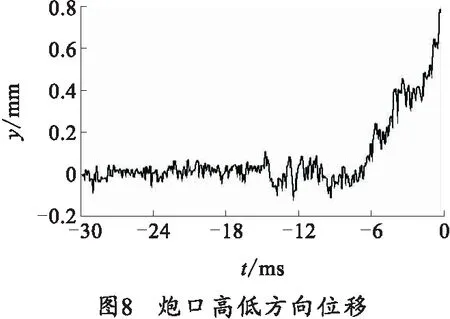
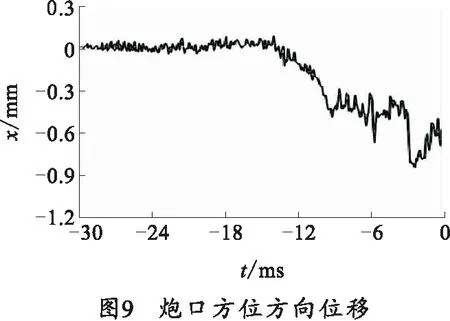
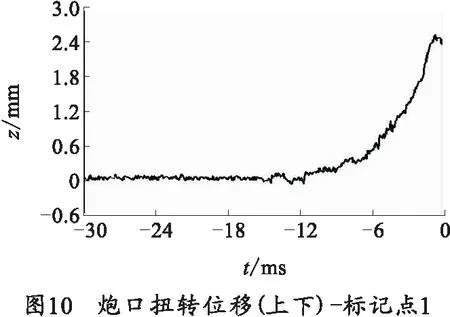
为了数据统一,约定弹丸弹头运动到炮口制退器中间部位的时刻为弹丸出炮口时刻。以火炮射向为观察方向,炮口高低正值表示炮口向上,炮口方位负值表示炮口向左,炮口扭转为正表示炮口逆时针扭转。测试曲线如图8~10所示。坐标系中横坐标0为炮口时刻(触发时刻),为了便于曲线对比,所有曲线开始时刻统一为炮口时刻向前30 ms,该时间段完全可以覆盖弹丸膛内时间。
笔者使用的高速摄像机为黑白像机,像素为1 280×800,帧速为10 000 帧/s,镜头焦距为400 mm.炮口高速摄像机视场画面中左右两点距离为190 mm,所占像素个数为130,一个像素代表的距离约为1.5 mm.
由图8~10的测量曲线可以看出,从弹丸启动到弹丸出炮口时段有以下现象:
1)炮口高低位移为正值,表示炮口在膛内期间一直上抬,弹丸出炮口时刻达到最大值,约为0.8 mm.
2)炮口方位位移始终为负值,表示弹丸在膛内期间,炮口一直向左偏,弹丸出炮口时达到最大,约为0.7 mm.
3)标记点1扭转位移(上下)一直为正值,可以判断炮口为逆时针扭转。
4)炮口扭转位移量(上下)明显高于炮口高低位移量。
测试结果表明:某155 mm火炮射击时,炮口会发生逆时针扭转,且炮口向左上方向一直偏移,炮口扭转对测试影响结果较大。
6 结束语
笔者提出了一种大口径线膛炮炮口振动位移测试方法,得到水平射击条件下,某155 mm火炮炮口高低方向振动位移约为0.8 mm,方位振动位移约为0.7 mm,炮口扭转的上下位移约为2.2 mm.通过亚像素图像处理精度验证,该数据真实有效。
该测试方法为非接触式方法,可消除身管扭转对测试结果的影响,从而获得较为准确的炮口方位和上下方向位移。经靶场测试证明该测试方法具有可行性,不仅能够适用于155 mm火炮炮口振动位移测试中,而且适合武器装备的微小振动位移测试中,具有很好的借鉴价值和广阔的应用前景。