变速恒频变桨距风力机自抗扰控制
2010-11-20谢景凤杨俊华刘慧媛刘远涛陈亦哲
谢景凤,杨俊华,刘慧媛,刘远涛,陈亦哲,吴 捷
(1.广东工业大学,广东广州510006;2.华南理工大学,广东广州510641)
0 引 言
随着风力发电机单机容量的不断增大,变速恒频型风力发电机组已成为主流机型,变速恒频风力发电技术的研究也成为国内外风力发电领域的研究热点[1-2]。不同风况下风力机有不同的控制目标及运行策略:额定风速以下运行时,风轮应保持最优叶尖速比,实现风能的最大功率跟踪;额定风速或以上风况下运行时,通过控制桨距角,保持转速恒定并维持输出功率稳定。然而,空气动力特性的非线性,风力机工作风速范围较宽,柔性结构的传动链以及随转速变化的机械阻尼,都给系统控制带来困难[3]。文献[4]提出应用神经网络控制方案,调节风轮转速实现最大风能捕获,改善了系统的控制性能,但稳态误差较大,实现较为困难。文献[5]将神经网络控制器应用到大型风电机组的电控系统中,跟随性能和抗干扰性能优于PID控制器,能有效克服风电系统中模型参数变化和非线性等不确定因素。文献[6]采用极点配置方法设计了PID桨距角控制器,但当风机运行点偏离其线性化工作点时,控制器性能会严重降低,甚至会引起系统的不稳定。文献[7]提出双馈风力发电系统的PI自适应速度估计方法,构建了无速度传感器矢量控制系统,具有较好的稳态辨识特性,提高了系统对转子参数的鲁棒性。文献[8]提出了桨距角H∞控制器,仿真结果说明其仅适用于线性化风机模型,而且性能也未在非线性模型上得到验证。文献[9]通过对有功功率和无功功率进行解耦控制,虽能实现最大风能追踪的目的,但系统动态性能不够理想。
自抗扰控制(以下简称ADRC)是一种基于误差反馈的非线性控制方法,原理简单,不依赖于系统模型,可对系统的未建模动态和未知扰动作出较好的估计和补偿,具有超调低、收敛速度快、精度高、抗干扰能力强及算法简单等特点,在控制对象参数发生变化或有不确定性扰动时具有较强的自适应性和鲁棒性[10]。目前,自抗扰控制已在电机控制、电力电子变换控制等诸多领域得到应用[11-14]。基于自抗扰控制策略,根据不同风况,设计自抗扰控制器,通过全风况范围仿真,证明了系统的良好动态性能和对参数变化的鲁棒性。
1 风力发电机组动态模型
1.1 风机模型
根据空气动力学的基本理论,风叶轮从风中吸收并可转化的机械功率为[15]:

式中:P为吸收功率;ρ为空气密度;Cp为风能利用系数;λ为叶尖速比;θ为桨距角;R为风轮半径;V为风速;ω为风轮转速。
Cp表示风轮从风能中获取能量的能力,是叶尖速比λ和桨距角θ的非线性函数[16]。

由式(2)可得风力机风能利用系数特性曲线Cp(λ,θ),如图1如示。
由图1可知,桨距角一定时,有且仅有唯一叶尖速比对应于Cp的最大值,该叶尖速比称为最优叶尖速比λm。当桨距角为零时,最优叶尖速比即对应最大风能利用系数Cpmax。因此,风力机额定风速以下运行时,保持桨距角0°不变,叶尖速比可保持最优λm,实现最大风能捕获;图中也显示Cp随桨距角的增大而减小,因此,当风速高于额定风速而又低于切出风速运行时,通过增大桨距角以降低Cp,限制风轮吸收风能,控制输出功率恒定。
1.2 传动机构模型
风轮从风能中吸收的气动转矩为[17]:

对于含有增速齿轮箱的风力机,假设传动系统的阻力全部集中于风轮主轴上,且主轴为刚性轴,则风轮主轴的运动学方程为:

式中:T为风力机转矩;Te为发电机转矩;n为齿轮箱增速比;J为系统等效总转动惯量;Kd为转动阻尼系数;ω为风轮转速。
1.3 执行机构模型
变桨距执行机构有电动和液压两种,为研究方便,忽略系统时滞作用,将模型简化为一个一阶惯性环节[18],则变桨距执行机构的传递函数:

式中:T为时间常数;θref为参考节距角。
2 风力机的ADRC控制策略
2.1 自抗扰控制器的结构
自抗扰控制器由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性反馈控制律(NLSFE)三部分组成[10-11]。结构框图如图2所示。
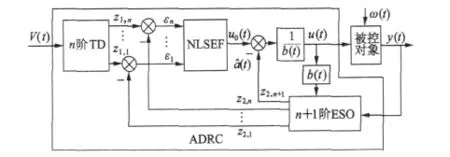
图2 自抗扰控制器ADRC结构图
这里,n阶TD根据需要安排参考输入V(t)的过渡过程,同时给出参考输入的各阶导数跟踪信号z11,…,z1n;n+1阶ESO估计对象的各阶状态变量z21,…,z2n和对象总扰动的实时作用量zn+1;非线性状态误差反馈控制律是利用TD输出和ESO输出之间误差,即系统广义输入与对象的广义输出之间的误差产生对象所需控制量,并对扰动量进行补偿。由于自抗扰控制器不依赖于被控系统的精确数学模型和外扰的具体形式,只需受控对象的模型结构满足一定的要求即可,因此只要适当选好有关非线性函数及参数,在一定的运行范围内,控制系统就可具有良好的适应性和鲁棒性。
对于如下一类SISO非线性不确定对象:


这里,R1为一阶TD的系统参数,通过改变R1可调整一阶TD输出信号对输入信号的跟踪过程;α0、α1、α2为表征非线性函数fal(ε,α,δ)非线性程度的参数,当0﹤α﹤1时,抑止误差信号的能力较强。δ0、δ1、δ2为表征fal(ε,α,δ)线性区间大小的参数;k1、k2、k3为待定比例参数。其中非线性函数:

2.2控制器设计
额定风速以下时,由图1分析可知,保持桨距角为0°,以对应风速下的转速为给定转速参考输入,设计转矩Te的控制律使转速ω跟踪最佳转速,以实现风能的最大功率跟踪。

则由式(6)可构造一阶TD为:

状态观测器:

式中:z21、z22分别为系统状态变量观测值和系统扰动估计值。
以ε1=z11-z12构造非线性控制律,则控制量:
额定风速及以上时,系统采用变桨距调节方式,使风力机转速及系统输出功率稳定在额定值附近。取系统恒功率输出运行时的一个平衡工作点P对式(4)进行泰勒展开,略去高次项,并设展开点参数为T0、θ0、ω0则:

结合式(4)可得:

以Δω为输入量构造扩张状态观测器:

非线性控制量:

以上所有待定参数都需经调整确定。系统控制结构框图如图3所示。

图3 系统自抗扰控制结构图
3 系统仿真及分析
风力发电机组主要仿真参数如下:额定功率为PN=1.5 MW,额定风速V=12 m/s,风轮半径R=40 m,风轮转速范围8~25 r/min,切入风速Vin=4 m/s,切出风速Vout=25 m/s,齿轮箱增速比n=87,最优叶尖速比λ=7,最大风能利用系数Cpmax=0.44,风轮质量惯性矩J=90×106kg·m2,转动阻尼系数Kd=0.05,空气密度1.25 kg/m3,变桨距执行机构位移为0~45°,速度为0~10°/s,时间常数T=0.02,Δωref=0,P点的参数为:ω0=17.2 r/min(额定值),θ0=3°,T0=1.0×106N·m。
自抗扰控制器ADRC1参数整定为:R1=200、α10=0.8、α11=0.8、α12=0.8、δ10=0.01、δ11=0.015、δ12=0.01、k11=75、k12=2 000、k13=2 500;ADRC2参数为:R2=250、α20=0.8、α21=0.8、α22=0.8、δ20=0.01、δ21=0.015、δ22=0.01、k21=75、k22=1 000、k23=1 500。
系统全风况范围内仿真如图4~图8所示,由图中可看到,风速在12 m/s以下时,桨距角保持为0°,系统保持最优叶尖速比变速运行,最大风能利用系数基本保持恒定,实现了风能的最大功率跟踪;风速高于额定风速12 m/s时,桨距角发生变化,风轮转速保持在额定值附近,叶尖速比发生相应变化,风能利用系数降低,输出功率维持在额定值附近。且改变控制系统的参数,在保证有效控制的前提下,参数可以在较大范围内选取。
由以上分析可知,在全风况下,风力发电系统得到了有效的控制,有较好的动态性能,且控制系统具有对参数有较强的鲁棒性。



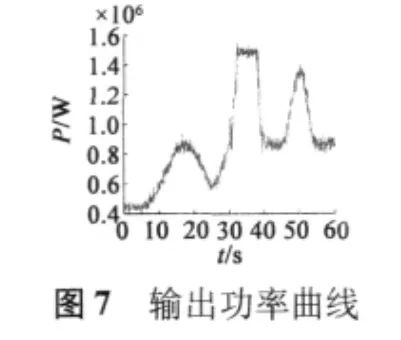

图8 风轮转速曲线
4 结 语
为提高变速恒频风力发电机组的控制性能,本文在建立风电机组的动态模型基础上,设计机组的自抗扰控制系统;低于额定风速时,跟踪给定转速,实现了最大风能捕获;高于额定风速时,控制桨距角,限制风能吸收,使风机转速和功率值保持在额定值附近。仿真结果表明自抗扰控制方法具有较好的动态性能,且对系统参数和风速有较强的鲁棒性。
[1] Beltran B,Ahmed-Ali T.Sliding mode power control of variable-speed wind energy conversion system[J].IEEE Transactions on Energy Conversion,2008,23(2):551-558.
[2] 马幼捷,尹向前,赵国华,等.变速恒频双馈风电机组参数扰动对并网控制的影响[J].太阳能学报,2009,30(5):650-654.
[3] Senjyu T,Sakamoto R,Urasaki N,et al.Output power leveling of wind turbine generator for all operating regions by pitch angle control[J].IEEE Transactions on Energy Conversion,2006,21(2):467-475.
[4] Li H,Shi K L,Mclaren P G.Neural-Network-Based Sensorless Maximum Wind Energy Capture with Compensated Power Coefficient[J].IEEE Transactions on Industry Applications,2005,41(6):1548-1556.
[5] 刘新海,于书芳.神经网络在大型风力发电机电控系统中应用[J].微特电机,2004,32(2):37-38.
[6] 李晶,宋家骅,王伟胜.大型变速恒频风力发电机组建模与仿真[J].中国电机工程学报,2004,24(6):100-105.
[7] 李岚,王颖.双馈风力发电系统PI自适应速度估计[J].微特电机,2007,35(3):81-10.
[8] Rocha R,Filho L S M.A multivariable H∞control for wind energy conversion system[C]//IEEE Conference on Control Applications.Istanbul,Turkey,2003.
[9] 刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制[J].电力系统自动化,2003,27(20):62-67.
[10] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[11] 杨金明,吴捷,张宙,等.采用自抗扰控制器的永磁直线电动机速度控制[J].微特电机,2004,32(5):31-33.
[12] 潘剑飞,曹广忠,王鑫.新型直线磁阻电机的自抗扰控制[J].微特电机,2008,36(8):1-4.
[13] 张先勇,吴捷,杨金明.基于自抗扰解耦的变速恒频风力发电功率控制系统[J].电气传动,2007,37(2):8-12.
[14] 杨国顺,吴捷,陈渊睿.矩阵变换器的自抗扰控制技术[J].电机与控制学报,2005,9(4):311-315.
[15] 风力发电机组的控制技术[M].北京:中国机械出版社,2002.
[16] Slootweg J G,Kling W L,Polinder H.Dynamic modeling of a wind turbine with doubly fed induction generator[C]//IEEE Power Engineering Society Summer Meeting.Vancouver,Canada,200l(1):644-649.
[17] Rajib Datta V,Rangannathan T.Variable-speed wind power generation using doubly fed wound rotor induction machine-A comparison with alternative schemes[J].IEEE Trans.Energy Conversion,2002,17(3):414-421.
[18] Ko H S,Lee K Y,Kim H C.An intelligent design to power system stabilization[J].Electric Power Systems Research,2004,(71):1-9.
