基于自抗扰技术的无轴承异步电动机SVM-DTC控制系统
2010-11-20朱大敏刘贤兴
朱大敏,刘贤兴
(江苏大学,江苏镇江212013)
0 引 言
无轴承异步电动机定子中转矩控制绕组和悬浮控制绕组的相互作用实现转子的稳定悬浮,但旋转力和径向悬浮力之间存在着复杂的耦合关系[1],目前对无轴承异步电动机旋转力的控制方法主要有矢量控制、直接转矩控制、定子磁场定向控制和基于空间电压矢量的直接转矩控制(以下简称SVMDTC)[1-2]等。由于无轴承异步电动机是一个多变量、强耦合、非线性的复杂系统,上述控制方法中的调节器通常都使用PI或PID控制器。虽然PID控制器结构简单,算法易于实现,却无法解决快速性和稳定性之间的矛盾,并会有一定的超调量,动态性能较差,鲁棒性不强,且对于不同的控制对象,需要重新调整参数,适应性不强。因此PID控制器很难满足无轴承异步电动机高速高精度的要求[5,9]。
文献[5]提出了一种新型的非线性控制器自抗扰控制器(以下简称ADRC)。它能够实时地补偿系统的总扰动,不依赖于被控对象的精确的数学模型,具有很强的适应性、鲁棒性和抗干扰性,可适用于时变系统、多变量系统、最小相位系统,已在以机械手、发电机、液压机、噪声控制等为对象的试验中,获得很好的控制效果。
本文采用自抗扰控制器替代无轴承异步电动机SVM-DTC控制系统中的PI或PID控制器,建立了基于自抗扰技术的无轴承异步电动机SVM-DTC控制系统。系统用扩张状态观测器(以下简称ESO)实现转子磁链和速度的辨识,从而得到转矩绕组和悬浮绕组需要的定子磁链和气隙磁链,并实现无速度传感器,且整个系统具有很强的鲁棒性和适应性。
1 无轴承异步电动机SVM-DTC系统组成
1.1 无轴承异步电动机数学模型
无轴承异步电动机数学模型主要包括旋转部分模型和径向悬浮部分模型。旋转部分数学模型[2,4]由电压、磁链、电磁转矩及拖动方程组成,公式如下:
定子、转子电压方程:

式中:u1s、u1r、i1s、i1r分别为转矩绕组定转子上的电压和电流;ψ1s、ψ1r、ψ1为定转子磁链和气隙磁链;R1s、R1r为定转子电阻;ω1为同步角速度;ωr为转子角速度。下标1、2表示转矩绕组和悬浮绕组,α、β表示α、β轴上的分量。
完整的磁链方程(气隙、定子、转子):
式中:Lm为定转子互感;L1sl、L1rl为旋转绕组定子转子漏感。
转矩及拖动方程:

式中:Te为电磁转矩;p1为转矩绕组极对数;TL为负载转矩;J为转动惯量。
悬浮部分数学模型的径向悬浮力:

式中:km=为悬浮绕组极对数;Lm2为悬浮绕组互感;μ0为空气磁导率;l为电机铁心长度;r为转子外径;W1、W2分别为旋转悬浮绕组中每相串联绕组的有效匝数。
1.2 无轴承异步电动机SVM-DTC系统建立[2-3]
基于空间电压矢量调制的直接转矩控制系统(SVM-DTC)框图如图1所示。

图1 无轴承异步电动机SVM-DTC控制系统框图
它主要包括转矩控制绕组中的目标电压矢量生成单元模块、电压矢量调制模块以及悬浮控制绕组中的力电流变换模块、电流逆变器模块等,其中两套绕组是通过转矩磁链计算模块中的气隙磁链联系在一起的。
1.3 参考电压矢量的生成
若当前定子磁链ψsk位置已知,又知晓Δθ(转矩角,由PI调节器给出),则可得到下一个周期内期望磁链到达的位置,定义将ψsr在α、β轴下进行分解:

为补偿该矢量ψsr,利用矢量合成的方法产生等效空间电压矢量usr,即:

再离散化,即可得到目标参考电压矢量usrα、usrβ。
1.4 电压空间矢量脉宽调制
SVM的目的是计算出合适的电压矢量及其作用时间,使得电机定子磁链在指定的时间内走到给定的位置。其算法步骤:
(1)判断参考矢量usr所在扇区,如图2所示;
(2)选取合适的空间电压矢量并计算出其作用时间;
(3)根据矢量作用时间合成PWM信号。

图2 空间电压矢量及扇区分布图
在图2中,6个非零矢量将电压矢量分成6个扇区,假定参考电压矢量usr在Ⅰ扇区,可用相邻的V1和V2来合成,定义T1、T2、T0分别为V1、V2和零矢量的作用时间,Ts为控制周期,利用矢量合成的平行四边形法则可求出各作用时间:

再对合成矢量的导通时间进行饱和判断,采用对称细分原则,并加入零矢量,发出PWM波来控制电机。
在悬浮控制绕组中,径向位移的给定值与反馈值的差值,经过PI调节器,可得到径向悬浮力的给定值。将径向悬浮力的公式进行逆运算,可得出悬浮绕组定子电流i2d、i2q。这就是图1中的力电流变换模块,经过2/3变化和电流调节器,即可得到无轴承异步电动机悬浮绕组的控制电流。
2 基于自抗扰技术的无轴承电机SVMDTC控制系统设计
2.1 自抗扰控制器的结构和原理[5,9]
自抗扰控制器(ADRC)由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性状态误差反馈(NLSEF)控制律三部分组成。假设二阶系统为=f+bou,图3为二阶自抗扰控制器结构图。

图3 自抗扰控制器结构框图
其中扩张的状态观测器是自抗扰控制器的核心部分,由对象输出来估计对象的状态变量和对象总扰动(包括内扰和外扰)的实时作用量,并对输出进行扰动补偿。
2.2 速度转矩ADRC控制器设计[6,10]
由式(9)变形得到:

根据自抗扰控制器的基本理论,可构造一阶TD(可省略)、二阶ESO和一阶NLSEF,其公式分别为:
二阶ESO:

一阶NLSEF:

输出:

2.3 基于ESO的转子磁链观测和速度辨识模型[6-7]
根据式(1)、式(3)、式(5)、式(7),消除转子电流并整理,可得到如下的定子电流α轴的ESO模型和转子磁链的算式[6-7]:


式中:Lσ为定子漏电感,考虑转子电阻Rr以及转子磁链ψr的扰动情况,将代入式中,并整理得到(β轴类似):
式中:f01、f03为已知部分,w1、w3分别为α轴上的定子电流未知扰动和转子磁链未知扰动。观察w1、w3,我们可以发现有,即有了定子电流的未知扰动,适当调节参数,就可以获得转子磁链值ψr。
现在考察未知扰动公式w1、w2,即:
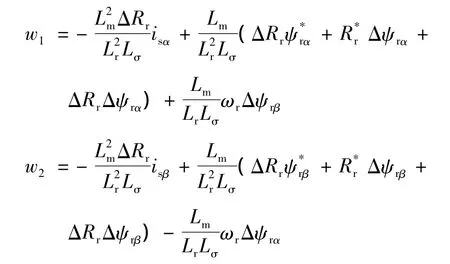
若不考虑转子扰动,联解w1、w2,可得到速度Δωr关系式:

通过简单的运算,就可以实现ωr的辨识。转子磁链和转速辨识的系统框图如图4所示。

图4 基于ESO的闭环转速和磁链辨识算法框图
得到转子磁链值,由式(5)、式(7)消除中间变量i1rd、i1rq,可得到气隙磁链ψ1d、ψ1q:

再由式(6)得到ψ1sd、ψ1sq。
2.4 基于自抗扰控制器的无轴承异步电动机SVMDTC控制系统设计
将自抗扰控制器运用于无轴承异步电动机的SVM-DTC中,形成基于自抗扰控制器的无轴承异步电动机SVM-DTC控制系统,其原理框图如图5所示。

图5 基于ADRC的无轴承异步电动机SVM-DTC框图
对比图1可以看到,新系统用ADRC控制器取代PI控制器,采用ESO方法辨识出转子磁链,从而获得定子和气隙磁链。
3 仿真实验
根据图5的系统框图,在Matlab中建立基于自抗扰技术的无轴承异步电动机SVM-DTC仿真控制系统。
仿真系统中采用的无轴承异步电动机参数如下:定子电阻Rs=2.01 Ω,转子电阻Rr=11.48 Ω,互感系数Lm=237.84 mH,定子等效电感Ls=242.38 mH,转子等效电感Lr=247.06 mH,转矩控制绕组极对数p1=2,悬浮绕组极对数p2=3,转动惯量J=0.007 69 kg·m2,磁链给定值为0.2 Wb。其
速度环自抗扰控制器参数有:β01=10 000,β02=20 000,α=0.5,η=0.01,β=2 000,b=0.036 76,Ts=0.1 ms。速度环PID控制器参数:P=1.7,I=156。
分别采用PI控制器和自抗扰控制器对电机模型进行仿真,仿真波形如图6所示。可以看出采用自抗扰控制器可以有效地消除速度的超调量,使系统达到良好的动态性能,并且用ESO实现速度的辨识,辨识精度较高,说明该方法的有效性。
图7和图9是电机空载,在0.25 s时突加一个2 N·m的扰动时的系统磁链以及悬浮绕组径向位移的曲线图。图7和图8显示外部的扰动对电机的定子磁链的影响很小,气隙磁链在负载变化时,过渡时间很短,波动也较小。

图6 PID和ADRC转速对比及转速辨识
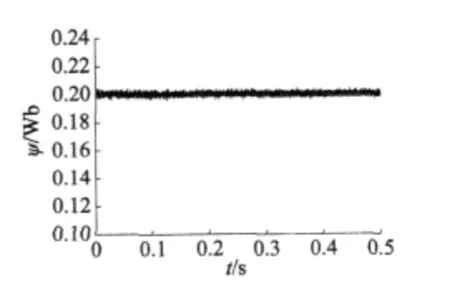
图7 自抗扰控制下的定子磁链
图9是施加外部干扰时,电机的悬浮绕组x轴径向位移图(y轴类似),负载突变时,转子并没有太大影响,仍然能够实现稳定悬浮,进一步说明自抗扰控制器的抗干扰能力及适应性强。

图8 通过ψr辨识得到的气隙磁链

图9 悬浮绕组x轴径向位移
4 结 语
本文针对传统PID控制器的缺点和异步电动机的复杂系统,设计了基于自抗扰控制器的无轴承异步电动机SVM-DTC控制系统。仿真结果显示,采用速度转矩ADRC可以有效地抑制转速的超调量,减少过渡时间;采用基于ESO的转子磁链和转速辨识,其辨识精度较高,抗干扰较强。整个系统的动态性能好,鲁棒性强,对负载突变、外部扰动、参数变化等都有很强的适应性,体现了自抗扰控制器的优越性。
[1] 王晓琳.无轴承异步电机基本控制策略研究与实现[D].南京航空航天大学,2004.
[2] 刘贤兴,马桂芳.无轴承异步电机SVM-DTC控制系统研究[J].传感器与微系统,2008,27(12):39-42.
[3] 王宇,邓智泉.无轴承异步电机的直接转矩控制技术研究[J].中国电机工程学报2008(21):80-84.
[4] 沈玉祥,沈玉祥,张腾超,等.无轴承异步电机数学模型与解耦控制[J].电机与控制学报,2007(04):321-325.
[5] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13:19-23.
[6] 苏位峰,孙旭东.基于自抗扰控制器的异步电机矢量控制[J].清华大学学报(自然科学版),2004(10):1329-1332.
[7] 刘志刚,李世华.基于永磁同步电机模型辨识与补偿的自抗扰控制器[J].中国电机工程学报,2008(24):120-125.
[8] Zhong L,Rahman M F.Analysis of DTC in permanent magnet synchronous motor drivers[J].IEEE Transactions on power Electrnics,1997,12(3):528-536.
[9] Han J.From PID to active disturbance rejection control[J].IEEE transactions on industrial Electionics,2009,35(3):900-906.
[10] Wang Z.Design of the expert ADRC[C]//Chinese Control and Decision Conference.2008:1761-1763.
