带对转螺旋桨的对转永磁无刷直流电动机研究
2010-11-20李延升窦满峰雷金莉
李延升,窦满峰,雷金莉
(西北工业大学,陕西西安710072)
0 引 言
对转永磁无刷直流电动机采用永磁体作为外转子,电枢绕组作为内转子,内外转子依靠永磁体和电枢绕组所产生的磁场力相互作用反向转动,它直接驱动对转螺旋桨,在水下航行器中广泛应用[1]。对转螺旋桨分为前桨和后桨,前桨联接于推进外轴,由对转电机的外转子驱动;后桨联接于推进内轴,由对转电机的内转子驱动。它既可以消除单螺旋桨旋转产生的横滚力矩,也可以提高螺旋桨的推进效率[2]。推进系统在运行过程中,由于对转机构自身参数和工作环境等因素的影响,内外转子转速一般不同。研究对转电机和对转螺旋轴驱动系统负载匹配问题,使得前后轴驱动系统转速相等,方向相反,可有效地提高推进系统效率。
本文根据对转永磁无刷直流电动机和对转螺旋桨的数学模型,在Matlab/Simulink软件中分别建立其仿真模型,通过仿真分析研究对转式永磁无刷直流电动机带对转螺旋桨的负载特性。
1 对转永磁无刷直流电动机和对转螺旋桨的数学模型
1.1 对转永磁无刷直流电动机的结构和工作原理
对转永磁无刷直流电动机有两个转子,与普通的永磁无刷直流电动机相比,除了永磁体部分可以旋转外,电枢部分也可以相对于静止部分旋转,其结构如图1所示[3]。
根据牛顿第三定律,内外转子受到的电磁转矩在任意时刻都是大小相等、方向相反。由于电枢绕组在旋转,三相绕组的出线必须通过滑环引出来,所以对转永磁无刷直流电动机中的“无刷”是指没有机械换向器及其电刷。对转永磁无刷直流电动机的电磁关系与普通永磁无刷直流电动机相同,不同之处仅仅是电枢转动使得电动机的运动规律不同:普通永磁无刷直流电动机的电磁转矩驱动转子旋转,而对转永磁无刷直流电动机的电磁转矩驱动内外转子朝相反的方向旋转。
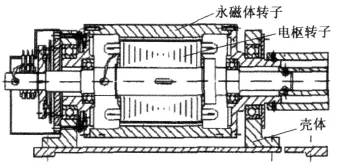
图1 对转永磁无刷直流电动机结构图
1.2 对转永磁无刷直流电动机数学模型
与普通永磁无刷直流电动机相比,对转永磁无刷直流电动机的电流方程、电压平衡方程一致,仅多了一个电枢转子的运动方程[3]。本文研究的对转式永磁无刷直流电动机,其气隙磁场波形为方波,绕组中感应电动势为梯形波,采用方波电流驱动。那么,假定对转永磁无刷直流电动机工作在二相导通星形三相六状态下,工作过程中磁路不饱和,不计涡流和磁滞损耗,三相绕组完全对称,那么三相绕组的电压平衡方程式为:

当三相绕组星形连接,没有中线时,其电流方程:

式中:Ua、Ub、Uc为绕组相电压;ia、ib、ic为绕组相电流;ea、eb、ec为绕组反电动势;R为每相绕组的电阻;L为每相绕组的自感;M为两相绕组间互感。
根据作用力与反作用力定律,对转式永磁无刷直流电动机的内外转子受到大小相等、方向相反的磁场力。所以,电磁转矩表达式可写为:

式中:ωr1、ωr2为转子的角速度(下标1表示电枢转子,下标2表示永磁体转子)。
三相绕组的反电动势波形是梯形波,大小可表示为:
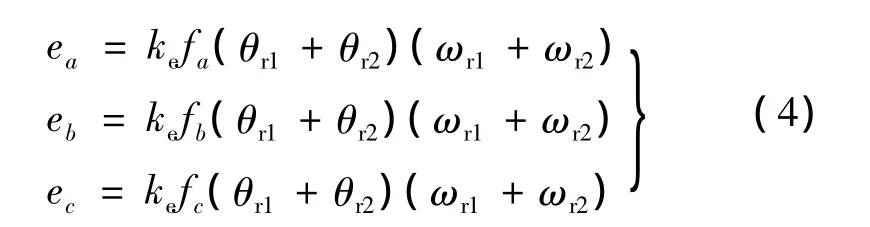
式中:ke为相反电势系数;θr1、θr2为转子转角。
fa(θr1+θr2)、fb(θr1+θr2)、fc(θr1+θr2)表示反电动势波形,它们是关于θr1和θr2的函数,其最大值为1、最小值为-1。如图2所示。
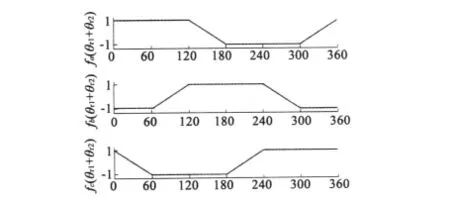
图2 反电动势波形图
增加电枢转子的机械运动方程,则对转式永磁无刷直流电动机的运动方程为:

式中:T01为内外转子的摩擦转矩;TL1、TL2为后桨和前桨转矩;J1、J2为转子的转动惯量。
1.3 对转螺旋桨的数学模型
根据螺旋桨的基本理论可知,螺旋桨转矩和转速有以下关系:

式中:kT为螺旋桨转矩系数;ρ为水的密度;D为螺旋桨直径;n为螺旋桨转速。
对转螺旋桨有前后两个桨,理论上两桨的转矩分别与其转速的平方成正比,可用式(6)表示。但实际上对转螺旋桨前后桨的转矩与转速的对应关系在系数上有差异,并且对实际试验曲线的拟合发现,对转螺旋桨的转矩不仅与转速的平方有关,同时也与转速的一次方有关[4]。即:

式中:nr1、nr2为内外转子转速;c1、c2、d1、d2为大于零的系数。
对转永磁无刷直流电动机接对转螺旋桨,当电机内外转子转速相等,前后两桨转矩相近,但不相等,两桨产生推力也不相同。

图3 转速计算模块
2 对转永磁无刷直流电动机和对转螺旋桨的仿真模型
2.1 对转永磁无刷直流电动机仿真模型
根据对转永磁无刷直流电动机的数学模型,在Simulink软件中建立仿真模型。该电机仿真模型包括反电势计算模块、电压方程模块、电磁转矩计算模块和转速计算模块。其中,反电动势计算是利用分段线性法模拟实现[5]。根据两个转子的相对位置,将一个运行周期0°~360°分为6个阶段,每60°为一个换向阶段,每一相的每一个运行阶段都可用一段直线进行表示,根据某一时刻的两转子之间夹角和转速信号,确定该时刻各相所处的运行状态,通过直线方程即可求得反电动势波形。
转速计算模块如图3所示,输入量有电磁转矩、对转螺旋桨负载转矩和摩擦转矩,输出量为转子位置和转速信号,它们都是二维向量。电磁转矩和负载转矩经过加法、乘法和积分运算后,得到转子角速度信号;对转子角速度进行积分运算即可得到转子位置信号。
2.2 对转螺旋桨仿真模型
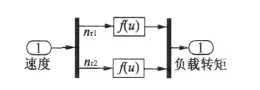
图4 对转螺旋桨转矩计算模块
根据对转螺旋桨的数学模型,如式(7),在Simulink软件中建立仿真模型,如图4所示。
该模块中输入是对转电机内外转子的速度信号,经过数学函数变换变为对转螺旋桨后桨和前桨的转矩信号。
3 实例仿真
3.1 仿真对象
为了分析对转电机带对转螺旋桨负载的特性,本文在Matlab/Simulink中建立了数字控制系统的仿真模型,如图5所示。

图5 实例电机仿真
仿真实验参数如下:电机工作状态为三相六状态,电压270 V,转速1 000 r/min,极对数5,相电阻0.464 Ω,相电感0.001 5 H,电势系数0.6 V/(rad·s),内外转子转动惯量分别为J1=0.01 kg·m2、J2=0.015 kg·m2。对转电机采用PWM调节输出转速,一般采用PI调节器,构成转速和电流双环调节系统[6],电流内环是把直流母线电流作为电流反馈。内环PI调节器输出与转子转角信号产生PWM波,逆变器采用上下管共同PWM调制的方法。
3.2 仿真结果分析
根据式(5)和式(7),可分成以下a、b、c三种情况分析。图中都以内转子转速方向为正方向。
(a)当c1、c2、d1、d2为零且电机工作在空载状态时,分析内外转子的摩擦转矩T01和T02的影响,如图6所示。
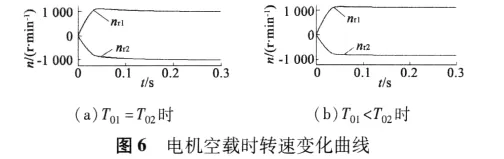
图6中,当内外转子摩擦转矩相等,由于内转子转动惯量小,转速nr1稳定快,稳定后两转子转速相等,方向相反;当外转子摩擦转矩大于内转子,稳定后内转子转速大于外转子转速。
(b)当c1=c2、d1=d2及给内外转轴上加相同的两个螺旋桨负载,分析转子摩擦转矩不同时转速的变化,如图7所示。
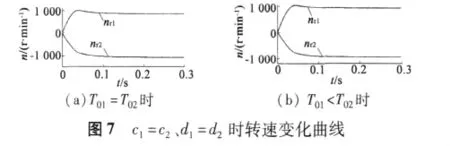
在图7中,当T01=T02时,内转子转速开始上升快,达到额定转速后转速降低,外传子转速一直上升至稳定状态;适当地增大外转子摩擦转矩,可以使内外转子转速相等,如图7b所示。
(c)当c1≠c2、d1≠d2及取两个形状有差别的螺旋桨作负载,一般情况下对转螺旋桨的前桨叶片数多于后桨。分析摩擦转矩对转速的影响如图8所示。

如图8所示,当摩擦转矩相等,内外转子转速相同,方向相反;当外转子摩擦转矩大于内转子,内转子转速大于外转子转速。

图9a、图9b和图9c是以上所述的c种情况摩擦转矩T01=T02的电磁转矩、A相电流和三相反电动势波形图。从图中可以看出,电机起步阶段速度低,反电动势小,达到稳态后,反电动势波形接近理想梯形波。A相电流和电磁转矩波形表明:起动阶段系统保持转矩恒定,没有造成较大的转矩和相电流冲击,参考电流的限幅十分有效,电机稳定后,电流波形不是理想的梯形波,这是由于功率管开关引起的。
4 结 论
本文对所建立的对转永磁无刷直流电动机和对转螺旋桨的仿真模型进行仿真分析,可得以下结论:
(1)设计电动推进系统时应尽量使内外轴系统的转动惯量相同,内外转子同时达到额定转速,从而提高系统的响应速度;
(2)当内外轴系统的摩擦转矩相等时,内外转子更容易达到相同转速,如图6a、图8a所示,从而提高推进系统的效率。
(3)根据对转电机的转子惯量和摩擦转矩等相关参数,选择适当的对转螺旋桨,从而使内外转子获取相同转速,提高推进效率,如图7、图8所示。
本文的模型采用模块化方法设计,可以便捷地实现、验证控制算法,为分析和设计对转式无刷直流电动机控制系统提供了有效手段和工具。
[1] 李宏,徐德民,焦振宏,等.一种对转永磁无刷直流电机定转子相对位置检测方法[J].鱼雷技术,2008,16(2):38-39.
[2] 聂延生,韩学胜,曾红,等.对转螺旋桨的结构原理及特点分析[J].船电技术,2005,(2):50-52.
[3] 储俊杰.双转式永磁无刷直流电动机的仿真研究与控制[D].杭州:浙江大学,2003:7-8.
[4] 王建平.鱼雷电动力推进系统暂态分析[D].西安:西北工业大学,2002:11-12.
[5] 殷云华,郑 宾,郑浩鑫.一种基于Matlab的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008,20(2):293-298.
[6] 胡灵杰,李声晋,卢刚.基于Matlab无刷直流电机控制系统建模与仿真[J].机械电子,2007(12):35-38.
[7] 孙希通,王育才.双转式永磁无刷直流电动机系统建模与仿真[J].电机技术,2009(3):1-4.
[8] 黄永安.MATLAB7.0/Simulink6.0建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.
