基于直接转矩控制的异步电动机反馈试验系统
2010-11-20张有清杨文焕王世杰严兰舟
张有清,杨文焕,王世杰,葛 敏,严兰舟
(上海理工大学,上海200093)
0 引 言
交流异步电动机反馈试验装置的实现必须考虑两个因素:一是能模拟实际负载;二是试验台的效率[1]。在长期运行,特别是在大功率测试系统中,效率尤为重要。传统测试系统通过改变摩擦或机械惯性系数来改变负载,产生的机械能转化成了热能,因此系统效率很低。直流电机能很好地模拟实际负载[2],但由于直流电机本身的缺陷,如换向器和电刷的需要定期维修,这就限制了其应用。现在研究较多的则是采用转差频率控制的交流异步电动机模拟负载[3-4],它能很好地模拟负载的静态性能,但模拟动态负载的效果不是很好。
针对上述问题,本文提出一种新的方法,即采用直接转矩控制的交流异步电动机来模拟实际负载,与电机相连的两逆变器连于公共直流母线上,如图1所示,电机2(陪试电机)发出的电可提供给电机1(被试电机),因此系统从电网获取的能量仅为系统总损耗。
仿真表明:陪试电机能很好的模拟工业线性和非线性负载的静动态特性,系统效率高,网侧功率因数近似为1,谐波含量低。

图1 交流异步电动机测试系统结构图
1 网侧SVPWM整流器控制策略
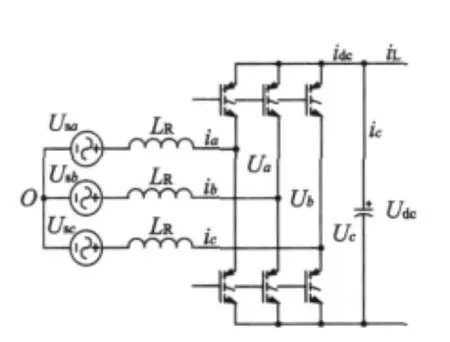
图2 网侧整流器主电路
网侧SVPWM整流器主电路如图2所示。其控制目标是输入电流和输出电压,输入电流是控制的关键。控制输入电流的大小则可以控制输入到整流器的能量,也就控制了直流侧电压。由于本负载测试系统的两电机连于公共直流母线上,系统从电网获取的能量较小,因此直流侧电压也较容易稳定。由图2可得电压方程式如下:

式中:Usa、Usb、Usc为三相电网电压;L、R为交流侧电感和电阻(包括开关器件电阻,电感的电阻等),Uao、Ubo、Uco为整流器三相交流侧电压,通过改变交流侧电压与电网电压之间的相位差可实现纯阻性负载运行。采用空间坐标变换方法,且令d轴滞后q轴90°,则式(1)变换到d-q两相同步旋转坐标系下的方程:

式中:Usk、ik、Uk(k=d,q)分别d-q同步旋转坐标系下的电网电压、网侧输入电流、交流侧电压;ω1为电网角频率。且认为三相电网电压:

经两相同步旋转坐标变换后且将电压矢量定位在d轴上,则Usd=380,Usq=0。由式(2)可以看出,两相电流之间还存在耦合,为了消除其间耦合,采用电流前馈解耦控制策略,其控制器方程:
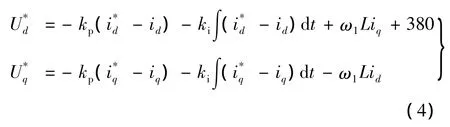
定义与Usd同相的电流分量id为有功电流,这样要获得单位功率因数整流只需令q轴电流分量iq为0,控制结构图如图3所示。此整流器采用电压外环和电流内环相结合的双闭环控制方案。

图3 网侧SVPWM整流器电流解耦控制原理图
2 公共直流母线
采用公共直流母线可以节省一台网侧变流器单元,陪试电机发出的电能通过直流母线供给被试电机。两电机间形成能量循环,整个系统效率较高,因此所需网侧整流单元的容量也较小。也正由于采用了公共直流母线形式,使得iL为idc1和idc2之和,因此iL有较大的脉动。这也使得idc有较大的脉动,网侧高次谐波含量较高,因此可在网侧加一低通滤波器滤除电流高次谐波。
3 异步电动机直接转矩控制
3.1 直接转矩控制原理
异步电动机直接转矩控制系统原理结构图如图4所示。控制系统包括三点式转矩Bang-Bang控制环和二点式磁链Bang-Bang控制环,通过转矩和磁链滞环输出以及扇区号查开关表[5]选择合适的空间电压矢量,调节电机的电磁转矩和磁链快速跟踪给定。

图4 直接转矩控制控制结构图
3.2 定子磁链和电磁转矩计算
交流异步电动机定子磁场定向等值电路如图5所示。

图5 交流异步电动机定子磁场定向等值电路
由定子电压方程可得:

式中:Us、is分别为定子电压、电流矢量。实现时,利用的是α-β轴上的计算公式:
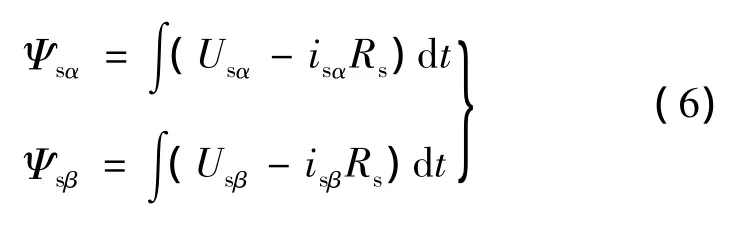
式中:ψsα、ψsβ,usα、usβ,isα、isβ分别为定子磁链、定子电压和定子电流分别在α、β轴上的分量。
电磁转矩方程[6]:

式中:p为电机极对数。
4 陪试电机控制策略
负载测试系统必须能够根据实验要求给被试机提供所需要的负载,事实上,被试电机的实际负载往往可以用一个带有惯性系数的多项式[7]表示:


被试电机的运动方程:

式中:Tm为加在被试电机转轴上的负载转矩;J1为被试电机的转动惯量系数;B1为被试电机的摩擦系数。联合式(9)和式(10),则陪试电机通过联轴器作用于被试电机的负载转矩Tm可表示:

为了让Tm较好地反映实际负载Tload,本系统中陪试电机的电磁转矩直接给定,这正好利用了直接转矩控制的优点。把实际负载转矩Tload直接作为Tm,根据式(11)可求出此时陪试电机所需要产生电磁转矩,在电机的直接转矩控制中,该值作为电磁转矩的给定值T*e2,那么其运动控制方程:
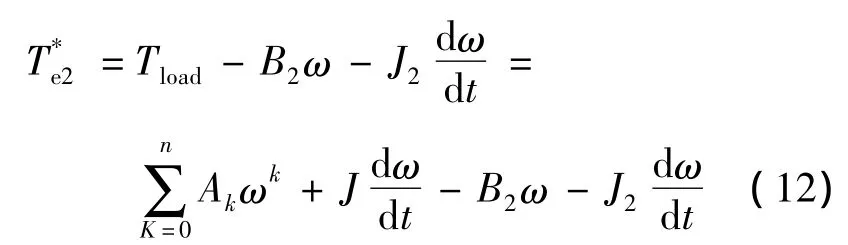
在测试过程中,只要能让Te2快速跟随就能较好地反映Tload,因此陪试电机采用转矩闭环控制。被试机也采用直接转矩控制,但采用速度闭环控制模式;其电磁转矩T*e1由转速PI调节器获得,而不象陪试电机那样直接给定。
这种方法的特点是结构简单,不需要外加转矩调节器,转矩、转速响应速度快。
5 仿真结果
两交流异步电动机的仿真参数如下:定子电阻Rs为0.435 Ω,转子等效到定子上的电阻为0.435 Ω,定子电感为0.071 H,转子等效到定子上的电感为0.071 H,定转子互感为0.069 H,转动惯量为0.02 kg·m2,摩擦系数0.001,极对数为2。定子磁链幅值给定值Ψ*=1.0 Wb,磁链滞环比较器容差为0.01,转矩滞环比较器容差为2。以下各网侧电压波形的幅值均缩小10倍,网侧电压电流仿真时间截取为0.45~0.65 s。
Tload=50 N·m恒转矩负载,被试电机转速指令在0.5 s时由150 rad/s变化到100 rad/s,系统波形如图6和7所示。由图6可见,Tm能很好地模拟恒转矩负载,被试电机速度响应快,超调量小。由图7可见,当被试电机制动时,系统向电网反馈能量且网侧功率因数近似为-1,转速稳定时网侧功率因数约为1。

图6 模拟恒转矩负载调速时,被试电机ω、Tm、Te波形图

图7 模拟恒转矩负载调速时,网侧一相电压电流波形
被试电机转速指令为150 rad/s,负载转矩指令Tload在0.5 s由50 N·m跳变到30 N·m时,系统波形如图8和9所示。

图8 转速恒定、负载转矩变化时,被试电机ω、Tm、Te波形图

图9 转速恒定、负载转矩变化时,网侧一相电压电流波形
由图8可见,该系统动态性能比较好,Tm从50 N·m变化到30 N·m只需要几毫秒的响应时间,这种快速响应性能是和采用直接转矩控制的控制策略分不开的,且Tm变化时,被试电机的转速几乎保持恒定。
由图9可见,Tm变化时,网侧功率因数仍然为1,且电流幅值仅有几安培。当Tm=50 N·m时,网侧电流幅值约为5 A,则系统向电网吸收的功率约为2.5 kW,如果被试电机连接传统的50 N·m摩擦性负载(被试电机的机械能转化为热能消耗掉),网侧一相电压电流波形如图10所示,被试电机向电网吸收的能量约为9 kW,因此相对传统摩擦性负载,本系统节约的能量约为6.5 kW。
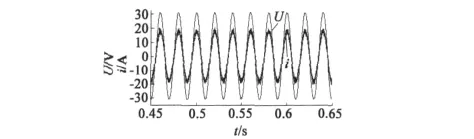
图10 被试电机接50 N·m负载,网侧一相电压电流波形
图11分别为被试电机转速指令为150 rad/s,模拟风阻和摩擦转矩负载Tload=0.1ω+0.001ω2,惯性转矩负载时系统波形图。由图11可见,Tm能很好地反映Tload,且惯性负载为恒值,这说明陪试电机能很好地模拟风阻和摩擦转矩负载,惯性转矩负载。当转速稳定时,以上各图的Te1也是稳定的,说明此系统是稳定的。

6 结 语
本文提出基于直接转矩控制的交流异步电动机反馈试验系统,具有控制结构简单、给定转矩调节方便、系统效率高等优点。仿真表明:陪试电机能很好地模拟各种负载,系统向电网吸收的功率较小且网侧功率因数近似为1,谐波含量低。此系统也存在一些需要改进的地方,如需在网侧加一低通滤波器滤除电流高次谐波,减小转矩脉动和固定开关频率等。
[1] Ma Z,Zheng T,Lin F.Research on Reciprocal Power-fed AC Drive Test Rig for Electric Traction Applications[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems.2005:1873-1876.
[2] Newton R W,Betz R E,Penfold H B.Emulating dynamic load characteristics using a dynamic dynamometer[C]//Proceedings of the 1995 International Conference on Power Electronics and Drive Systems.1995(01):465-470.
[3] Collins E R,Huang Y.Programmable dynamometer for testing rotating machinery using a three-phase induction machine[J].IEEE Transactions on Energy Conversion,1994(03):521-527.
[4] Sun D,Lin W,Su J.Energy-closed AC asynchronous dive test system based on field-oriented vector control[C]//IEEE Conference on Industrial Electronics and Applications.2009(01):3576-3580.
[5] 徐传芳,王英,芦冰.低速段感应电动机直接转矩控制系统仿真[J].大连交通大学学报,2008(06):66-69.
[6] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1994.
[7] MazhariIman,VahediAbolfaz,Masoum.Induction motor load generator system using direct torque control method[C]//2007 Australasian Universities Power Engineering Conference.2007:1-6.
