感应电动机无速度传感器技术的发展与展望
2010-11-20程启明王映斐程尹曼汪明媚
程启明,王映斐,程尹曼,汪明媚
(上海电力学院,上海200090)
0 引 言
在高性能感应电动机控制系统中,为提高电机调速特性,需要采用转速闭环控制。速度检测装置多采用测速发电机或光电编码器。速度传感器的安装增加了系统成本,影响了检测精度,降低了可靠性,破坏了笼型电机简单、牢固等特性,并且不适合安装在潮湿和电磁噪声干扰大等恶劣环境中。无速度传感器技术无需检测硬件,免去了速度传感器带来的麻烦,现从容易测量的电机定子电压、电流等物理量中估算出电机转速。因此,现已成为高性能交流传动系统关注的热点问题。
目前速度估计方法基本上可分为两类:一类是基于理想化的电机模型和检测的电机端电流和电压信息来估算电机的速度,如开环速度估计方法[1-3]、模型参考自适应辨识法[4-8]与自适应转速观测器法[9-11],这类转速估计依赖于电机模型,速度估计的精度都不同程度地受电机参数的影响,并且在低速区和起动过程存在难以解决的稳定性问题;另一类是基于电机的非理想特性来检测电机转子位置和速度或者转子磁链的位置,如磁饱和、集肤效应、齿槽效应、人造转子凸极、转子偏心等电机的各向异性特性。这类方法包括转子齿谐波法、高频信号注入法与电感法等[12-19],这类转速估计不依赖电机数学模型和电机参数,速度估计不受电机参数影响,具有很强的鲁棒性,除齿谐波方法外,这些方案理论上都可以用于低速范围,但均会不同程度地受负载或工作点影响,并对采样有较高的精度要求。现在还没有一种理想的方法能同时解决低速性能以及不受参数变化影响并具有速度快等特点[20-22],每种方法都有各自长处与缺陷,在具体的应用中应选择适当的方法。
本文对常用的感应电动机无速度传感器控制方法进行了概括总结和介绍,分析了各种方法的优、缺点与应用要点,并指出了速度估计精度、系统抗干扰性、参数鲁棒性等进一步发展方向。
1 速度估计方法
1.1 基于理想特性的方法
(1)开环速度估计方法
该方法是利用检测到的电机定子电压、电流,通过电机数学模型直接推导的数学关系进行转速或转差频率的估计式。典型的开环速度估计方法主要有直接计算法[1]、电感变化的估算法[2]、反电势积分法[3]、扩展反电势法[4]等多种。
直接计算法在定子两相静止坐标系下电机的电压方程包含定子电压、电流及转子位置等物理量,通过推导电压方程可以由电压、电流等量直接计算得到转子位置;电感变化的估算法是通过电机的相电压和相电流值,实时计算出当前位置电机定子的相电感,通过比较电感计算值与实测值得到转子的位置;反电势积分法电机稳定运行时,定、转子磁链保持同步旋转,两者之间角度差为负载转矩角,可以通过计算定子磁链相角来得到转子位置,而定子磁链可以利用电压方程,由反电势积分求得;扩展反电势法定子两相坐标系下凸极永磁同步电机的电压方程要比隐极永磁同步电机复杂得多,许多适用于隐极永磁同步电机的基于计算电机反电动势的速度观测方法不能直接应用到凸极机上。构造扩展反电动势包含了转子位置信息,可以参照隐极机的计算方法,利用扩展反电动势获得转子位置和电机转速。
(2)模型参考自适应辨识法
模型参考自适应系统(Model Reference Adopt System,简称MARS)是利用两套不同的输入变量,两个不同结构的电机模型来估计电机的同一变量。其中将不含被估计量的电机模型作为参考模型,而将含被估计量的电机模型作为自适应模型。两个模型应该具有相同的输出量,利用两者输出量的误差来驱动一个PI算法的自适应机制,自适应机制产生一个转速估值,再利用此估值来修正自适应模型,最终达到自适应模型的输出跟踪参考模型的目的。
根据模型输出比较量不同,可分为基于转子磁链[5]、反电势[6]、无功功率[7]、定子磁链[8]、定子电流[9]等多种MRAS。其中,转子磁链估算法由于使用电压模型来计算转子磁链,引入了纯积分环节,使得磁链模型受积分初值及零漂的影响严重,转速估计结果不准确。在低速时,反电动势值很小,且在转速过零时变化缓慢,使得算法对定子电阻的变化较为敏感,导致估计不准确甚至不收敛;反电动势估算法是转子磁通估算法的改进,避免了纯积分环节,但是定子电阻的影响依然存在,速度过零点时辨识误差大;无功功率法估算法也是转子磁通估算法的改进,此法的参考模型和可调模型中均不含定子电阻和积分环节,消除了定子电阻和纯积分的影响,获得了更好的低速性能和更强的鲁棒性,但估计的稳态精度却又受转子时间常数的影响,此法存在一定的稳定性问题,当转速给定为负的阶跃时,估计算法将不收敛;基于定子磁链的MRAS中电压模型和电流模型分别计算定子磁链,采用自适应算法调节上述两种模型计算的定子磁链一致,进而观测出电机转速。此法的缺点是观测器的精度依赖于电机参数的准确性,尤其是电压模型中,定子电阻随电机温升变化对定子磁链的计算结果影响较大;基于定子电流的MRAS用电机本身做参考模型,根据稳定性原理得到速度估计自适应公式,系统和速度的渐近收敛性由Popov超稳定性理论保证。此法实现起来比较简单,适用于一些对低速精度要求不高的场合。
(3)自适应转速观测器法
这类方法仍然含有MRAS的思想,只是参考模型改成了感应电动机本身,可调模型变成了闭环观测器。观测器的实质是状态重构,它利用原系统中可直接测量的变量作为它的输入信号,重新构造一个新系统,并使其输出的重构信号在一定的条件下等价于原系统的状态。此法是一种闭环算法,具有收敛性快、稳定性高、鲁棒性好、抗干扰性强、适用面广等特点。但算法比较复杂,计算量较大,受到计算速度的限制,高性能的微处理器和DSP处理器推动了此法应用。目前此法主要有全阶状态观测器[10]、降阶状态观测器[11]、扩展卡尔曼滤波器[12]、扩展Luenberger观测器[13]和滑模观测器[14]等多种。其中,全阶状态观测器法根据Lyapunov稳定性理论可以推导出自适应律,修正作为观测器系数的电机转速估计值;降阶状态观测器法根据电机定子电流可以直接测量来构造降阶观测器,将全阶模型可以分成可测量部分和可观测部分两个部分,只需对可观测部分设计降阶状态观测器,然后根据该降阶模型构造降阶磁通观测器;扩展卡尔曼滤波器法(简称EKF)是一种全阶随机观测器方法,它通过使用含有噪声的信号对非线性动态系统进行实时递推最优状态估计;扩展Luenberger观测器法(简称ELO)是对适用于线性时不变确定性系统的基本Luenberger观测器扩展,它将转速看成是状态变量,通过调整极点位置来调节系统的暂态行为,这种调节不会使静态性能变坏,此法在观测磁通的同时观测了转速;滑模观测器法是利用滑模变结构控制系统对参数扰动鲁棒性强的特点,采用估计电流偏差来确定滑模控制机构,利用滑模变结构控制系统把一般状态观测器中的控制回路改成滑模变结构形式。
表1列出了基于理想特性方法的优点、缺点与应用要点。
1.2 基于非理想特性的方法
(1)转子齿谐波法
感应电动机的定子和转子铁心表面存在齿槽,齿槽气隙中有谐波磁场。在转子旋转时,谐波磁场会在定子绕组中感应出谐波电压和电流。通过对定子电压或者电流的处理可得转子的齿槽谐波,齿谐波中包含了与转速成正比的频率成分。利用DSP技术提取谐波频率,根据其与转速的关系可得转速[15]。
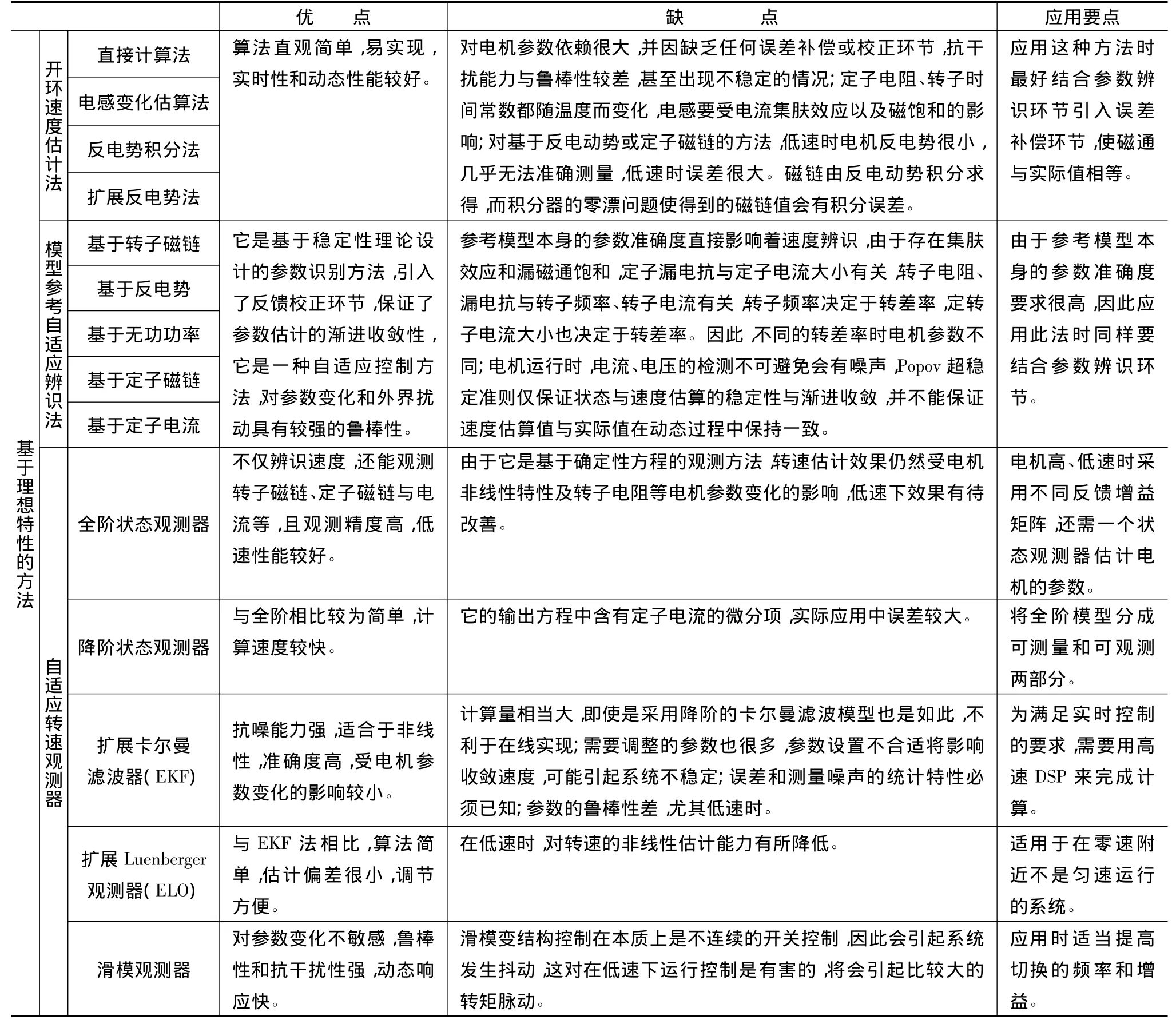
表1 基于理想特性方法的特点与应用要点
(2)高频信号注入法
高频信号注入法基于检测电机的凸极效应,通过在电机中注入特定的高频电压或电流信号,利用电动机内部固有的或人为的不对称性,使电机产生一个可检测的磁凸极,通过检测对应的高频电流或电压响应来获取转子位置和速度信息。根据注入信号的类型,高频信号注入法又可分为旋转高频电压注入法、旋转高频电流注入法以及脉振高频电压注入法。高频信号注入法具有利用电动机的凸极效应、注入高频激励信号和需要高带宽的噪声过滤器三个基本特征。根据注入信号的类型来分,高频信号注入法主要有旋转高频电压信号注入法[16]、旋转高频电流信号注入法[16]和脉振高频电压信号注入法[17]等三种。其中,旋转高频电压或电流注入法是在基波励磁电压或电流上叠加一个三相平衡的高频电压或电流激励,由此感应出的电流或电压矢量中包括正序分量和负序分量两个分量,负序分量就包含转子位置信息;高频脉振电压注入法是在估计的转子磁通方向上注入高频脉振信号,由于主磁路的饱和注入高频信号的磁场分布,使得对于注入的高频信号d轴和q轴的阻抗不同,利用电机交直轴高频阻抗的不同来获取转子位置和转速。
(3)低频信号注入法
低频信号注入法[18]是将某个特定频率的电流注入到电机观测d轴,如果坐标系定位不准,观测d轴与实际的转子同步坐标系的d轴不一致,注入的电流就会产生一个额外的交轴高频转矩,引起电机附加的高频振动。由高频转矩可以推算出与坐标定位角度误差成正比的误差信号,采用闭环控制算法使该误差信号收敛到零,就能把观测的同步坐标系准确定位到实际转子同步坐标系。
(4)电感法
电感法[19](也称INFORM法)是利用内埋式永磁同步电机自身的凸极特性或由于饱和引起的凸极效应,定子绕组电感随转子位置的改变而发生周期性的变化,由此提取转子位置。
(5)饱和定子谐波电压法
由于电机定子齿槽的截面积远远小于定子铁心的面积,因此电机在正常运行时,定子齿槽是在饱和状态下。感应电动机定子绕组无中性点,空间饱和三次谐波电压大致等于定子三相电压之和。通过检测定子三次饱和电压可估算出主磁链基波的模,对定子A相的电流进行检测还可推导出基波磁通矢量在静止坐标系下的相位角,从而得出主磁链空间矢量的基波分量。利用主磁链空间矢量的基波分量可导出电磁转矩的瞬时值[20]。
(6)漏感脉动法
电机由于转子齿槽的存在,漏感会随电机的转子位置变化而脉动,通过附加正反相抵的基本电压矢量脉冲及对电机的相电压测量,可以检测出漏感的脉动,对该脉动的信号进行计数得到电机的转子位置[21]。
(7)神经网络估计法
由于神经网络因其具有自适应、自学习、容错性等特性,非常适合于解决非线性问题。目前提出的神经网络速度估计法[22]大多是基于MRAS建立的,它通过比较电压模型和电流模型输出的转子磁链或其它物理量,采用神经网络训练电流模型得到转子磁链的估计值,通过对电压模型的实时计算得到磁链的实际值,两者之差作为输入样本,采用BP算法对神经网络进行修正训练,调节网络权值,使估计转子磁链跟踪转子磁链给定值,从而使估计转速跟踪实际转速。
表2列出了基于非理想特性方法的优、缺点与应用要点。
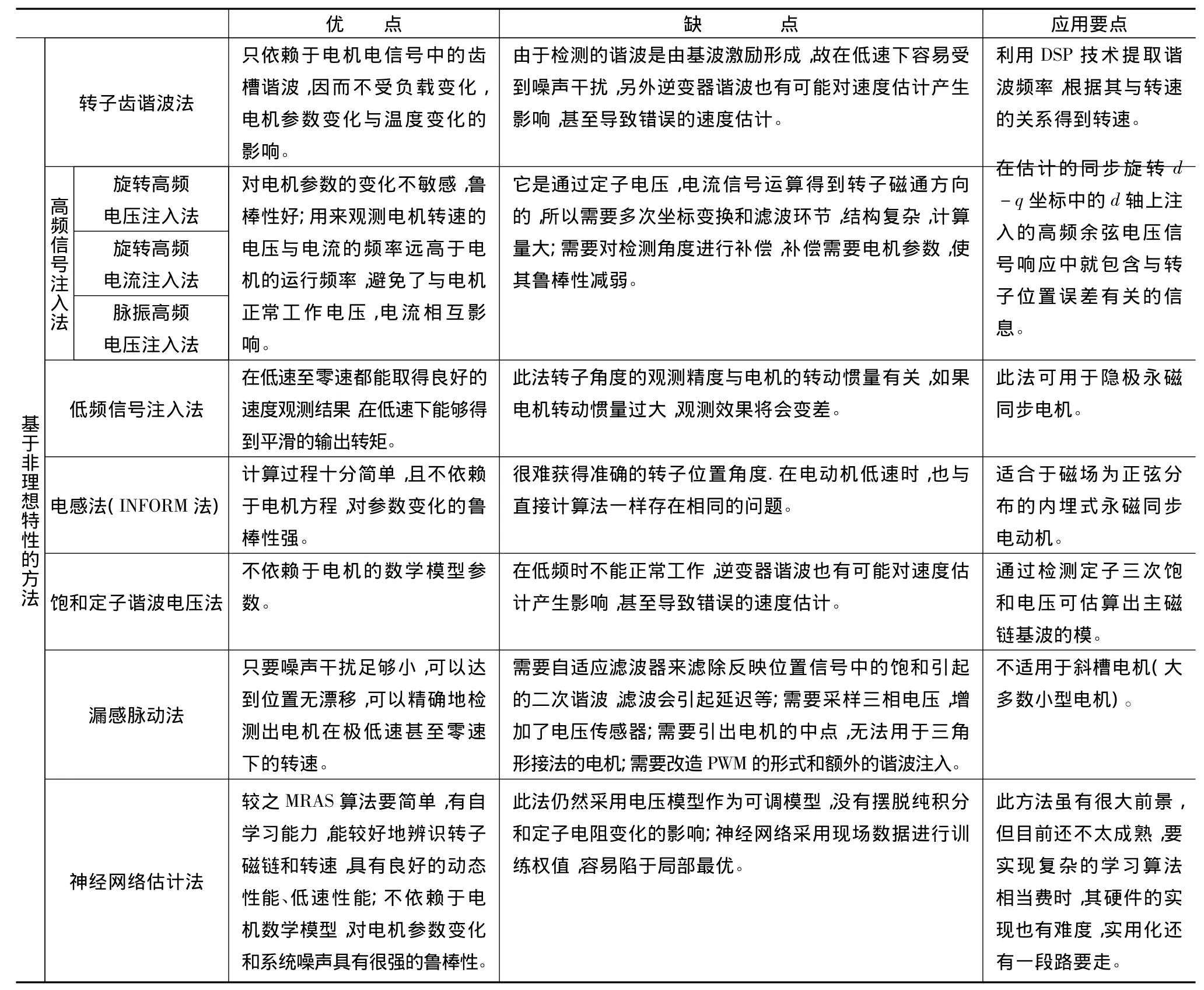
表2 基于非理想特性方法的特点与应用要点
2 研究热点与发展趋势
(1)零频率问题
基于感应电动机理想模型的磁通观测和速度辨识在同步频率为零时无法实现,但可以避开零频或在零频率附近用波动方法及利用电机的一些非理想特性的方法,为实现低速范围的无速度传感器控制提供了思路。基于感应电动机理想模型的低频范围处理方案主要有:d轴电流高频注入通过转矩脉动调节磁场定向方法、d轴扰动信号注入的EKF方法、零频率的回避方法等。
(2)低速发电稳定性问题
在通常的无速度传感器控制中,电动状态时观测器方法是稳定的,但是采用计算或辨识转速构成速度闭环系统时,由于系统的复杂性,可能会导致系统低速运行不稳定。
(3)电机参数辨识问题
现有的实用性较强的转速估计算法都要用到电机参数,电机运行过程由于热效应引起的参数变化会直接影响到系统的动、静态特性和转速估计精度。所以,在无速度传感器控制方案中增加电机参数的在线辨识环节会大大提高控制系统的性能,增强系统的鲁棒性。但是这样会影响到算法的复杂度、快速性、收敛性和系统的稳定性等问题。FPGA和高性能DSP的出现在很大程度上改善了速度计算速度,提高了时实性,但是也需要有高效的计算算法。此外,进行电机参数在线辨识的根本目的是为了提高转速估计以及磁场定向控制的精确度,实现真正的高性能交流传动系统。因此,电机参数和转速的同时在线辨识成为近年来的热门课题。
(4)其它研究热点问题
考虑电机铁损耗的影响,以提高电磁转矩的计算精度,实现最大效率控制;逆变器的死区时间和开关器件压降的补偿,以提高输出电压重构的精度;神经网络、模糊控制等智能控制技术在电机控制中的研究越来越广泛,随着智能控制理论与应用的日益成熟,会给交流传动领域带来革命性的变化;计算快速性、系统抗干扰性和参数鲁棒性等的提高,以开发出满足工业要求的、易于实现的、高性能控制方案。
3 结 语
速度辨识是感应电动机无速度传感器控制系统的一个关键环节,它直接影响感应电动机的控制性能。尽管目前已有很多方法可以实现速度辨识,但仍存在许多问题,在具体的应用中需要权衡利弊,选择适当的方案。今后的研究方向是提高速度估计的精度,改进低速区控制性能,提高系统的抗干扰能力和参数鲁棒性等。本文较全面地介绍了当前无速度传感器中多种速度辨识方法的原理与特点,对速度辨识方法的选择有一定参考指导价值。
[1] Hoque M A,Rahman M A.Speed and position sensorless permanent magnet synchronous motor drives[C]//Canadian Conference on Electrical and Computer Engineering.1994,2:689-692.
[2] Kulkarni A B,Ehsani M.A novel position sensor elimination technique for the interior permanent magnet synchronous motor drive[J].IEEE Transactions on Industry Applications,1992,28(1):144-150.
[3] Wu R,Slemon G R.A permanent magnet motor drive without a shaft sensor[C]//IEEE Industry Applications Society Annual Meeting.1990,1:553-558.
[4] 黄雷,赵光宙,年珩.基于扩展反电势估算的内插式永磁同步电动机无传感器控制[J].中国电机工程学报,2007,27(9):59-63.
[5] Schauder C.Adaptive speed identification for vector control of induction motors without rotational transducers[J].IEEE Trans.On Industry Application,1992,28(5):1054-1061.
[6] Maes J,Melkebeek J.Discrete time direct torque control of induction motors using back EMF measurement[C]//Proc.Of Industry Applications.1998,1:407-414.
[7] Jing H,Liao L.Control of speed sensorless permanent magnet synchronous motor based on MARS[J].Electric Drive for Locomotive,2007,1:33-36.
[8] Andreescu G D.Position and speed sensorless control of PMSM drives based on adaptive observer[C]//Proc.of EPE.1999,1:342-348.
[9] 齐放,邓智泉,仇志坚,等.基于MRAS的永磁同步电机无速度传感器[J].电工技术学报,2007,22(4):53-58.
[10] 黄志武,桂卫华,年晓红,等.基于自适应观测器的无速度传感器感应电机控制[J].控制理论与应用,2007,24(6):913-918.
[11] Kubota H,Matsue K,Nakano T.DSP-based speed adaptive flux observer of induction motor[J].IEEE Trans.on Industry Application,1993,29(2):344-348.
[12] Stubberud S C,Kramer K A.System Identification Using the Neural-Extended Kal man Filter For State-Estimation Modification,Intelligent Control[C]//IEEE International Symposium.2006,8:1999-2004.
[13] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无速度传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.
[14] Zhang Y,Utkin V I.Sensorless Sliding-mode control of induction motors[J].IEEE Trans.on Industrial Electronics,2000,47(6):1286-1297.
[15] Hurst K D,Habetler T G.A comparison of spectrum estimation techniques for sensorless speed detection in induction machines[J].IEEE Trans.Industry Applications,1997,33(4):898-905.
[16] Ribeiro L A S,Degner M W,Briz F,et al.Comparison of carrier signal voltage and current injection for the estimation of flux angle or rotor position[C]//IEEE-IAS Conference Record.St.Louis,1998,1:452-459.
[17] Jang J H,Ha J I,Ohto M,et al.Analysis of permanent-magnet machine for sensorless control based on high frequency signal injection[J].IEEE Transactions on Industry Applications,2004,40(6):1595-1604.
[18] Eskola M,Tuusa H.Sensorless control of salient pole PMSM using a low-frequency signal injection[C]//European Conference on Power Electronics and Applications.2005.1:10-14.
[19] Jang G H,Park K.Position detection and start-up algorithm of a rotor in a sensorless BLDC motor utilizing inductance variation[C]//IEE Proceedings of Electric Power Applications.2002,1:137-142.
[20] Choi J S,HanY S,Kim Y S.A new speed estimation scheme of the induction motor considering the flux Saturation[J].IEEE Trans.on Magnet.,2000,36(5):3595-3598.
[21] Holtz J I.Senserless position control standard induction motor a feasible technology[C]//Proc.of IPEMC.2000,1:21-32
[22] 何方国,齐欢.基于改进遗传算法的BP神经网络及应用[J].华中师范大学学报,2007,41(1):52-54.
