行波超声波电动机转速的极点配置控制策略研究
2010-11-20史敬灼
刘 博,史敬灼
(河南科技大学,河南洛阳471003)
0 引 言
目前,几乎所有曾经应用于传统电磁电机的控制策略都已尝试用于超声波电动机(以下简称USM)[1]。但是,由于超声波电动机研究历史不长,对超声波电动机不同于电磁电机的运行机理及非线性特点认识不足,超声波电动机的潜能未得到充分发挥,控制效果仍有较大的改进余地。
现有控制算法大多以被控对象数学模型为设计基础。超声波电动机运行机理复杂,无论是利用逆压电效应的机电能量转换过程,还是定、转子间的机械能摩擦传递过程,均具有显著的分散性和时变非线性[1-2];因而难以得到准确的数学模型,更难以得到相对简单、适合于控制应用的模型。模型问题是超声波电动机运动控制研究的关键问题。本文在利用实测输入输出数据获得USM系统控制模型的基础上,采用极点配置广义PID控制算法设计控制器,确定相关的控制器参数,实现了具有较高性能的行波超声波电动机转速闭环控制。
1 基于阶跃响应的超声波电动机模型辨识
为设计转速控制器,本文采用系统辨识的方法建立USM的频率-转速控制模型。选取可以充分激励出USM动态特性的频率阶跃信号为输入,相应的转速为输出,并测取输入输出数据进而辨识电机模型。考虑到控制器的计算量,将待辨识的电机模型阶次选为二阶。由于在控制器的DSP实现过程中,使用的输入变量是与电机实际频率值相对应的频率控制字。所以应对模型的输入变量进行转化以方便控制量计算。两者呈线性关系,如下:

式中:f为给定频率阶跃值;a0为对应的频率控制字。
考虑到实测阶跃响应曲线具有衰减振荡特性,采用针对二阶欠阻尼模型的特征点法辨识USM模型。取USM的频率-转速控制模型传递函数:

令Y*1和Y*2分别是阶跃响应曲线第一、二波峰相对于稳态值(即1)的高度,且其间隔时间为T0。则可得:

设定电机模型如式(2),采用特征点法对实测频率、转速数据进行辨识计算,得出ξ=0.293 5,ω0=752.881。图1给出了辨识模型阶跃响应仿真结果(图中虚线)与实测数据(图中实线)的对比,可见结果较为理想。

图1 实测与仿真阶跃响应对比
2 超声波电动机转速的极点配置控制
极点配置广义PID控制是一种极点配置控制策略,它按照极点配置控制原则设计广义PID控制参数,使系统闭环传递函数具有期望的极点,以满足闭环控制性能要求[3]。在各种不同的控制算法中,极点配置广义PID控制算法鲁棒性较好,且相对简单、实用性强。在已知USM系统传递函数的基础上,可以采用极点配置法设计控制器,确定相关的控制器参数,实现USM转速闭环控制。
PID控制器的离散增量形式为:

式中:e(k)为偏差信号
对式(5)进行Z变换,得到离散脉冲传递函数:

因此可得到控制器表达式为:

式中:F(z-1)=1-z-1;G(z-1)=g0+g0z-1+g2z-2。
可见,PID参数kp、ki和kd已经被新的参数g0、g1和g2代替,调整g0、g1和g2实际上是对kp、ki和kd进行调整。
极点配置广义PID控制将极点配置与PID控制相结合,即以式(7)为控制器基本形式,通过选择合适的PID参数,使系统具有期望的闭环特征多项式Ac(z-1)。由于d≥1,为使式(6)中的gi(i=0,1,2)有确定的解,并使所设计控制器满足因果条件,令:

式中,nf根据需要确定,且在能解出gi的前提下越小越好,一般情况下nf=1。用F(z-1)替代F(z-1),则系统的闭环特征多项式变为:

控制量可写为:

用F(z-1)替代F(z-1)后,所得到的控制器形式已不同于式(5)的传统PID控制器,故称之为“极点配置广义PID控制”。
将前文辨识得到的超声波电动机传递函数模型转化为随机差分模型,模型仍为二阶,且有A(z-1)=1+0.112 8z-1+0.003 2z-2,B(z-1)=1.414+0.081 5z-1,d=1。基于该模型,按照极点配置法设计闭环控制器。为提高系统响应速度,可考虑设定闭环传递函数为一阶系统,即只有一个极点,该极点的取值决定了闭环控制性能。
当设定期望的闭环特征多项式为Ac=1-0.01z-1,即取极点p=0.01时,根据上述模型和极点配置法设计过程,选定nf=1并由式(9),比较两边同幂次项的系数,可解得式(7)中的未知多项式如下:

这样就得到了使闭环极点符合期望的控制器,进而由式(10)可写出控制量的在线计算式:

期望极点取值不同,系统性能会有差异。当设定期望的闭环特征多项式为Ac=1-0.03z-1,即极点p=0.03时,闭环系统的响应速度会较p=0.01时稍慢。这种极点取值情况下,采用与上述同样的设计过程,可得控制量:
根据上述控制器设计参数及USM模型,通过仿真计算,可得到不同极点位置时的闭环控制系统阶跃响应如图2所示。图中实线为p=0.01时的响应曲线,虚线为p=0.03时的响应曲线。图2表明,闭环控制性能符合预期。期望极点取为0.01时的系统响应速度稍快,且两个不同极点位置设计的控制器都可以使系统在0.07 s内达到稳态,无超调,稳态误差为零。
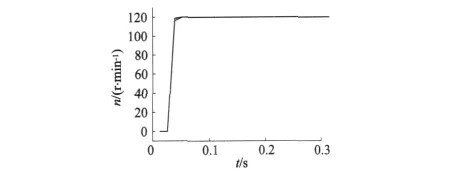
图2 设计闭环系统的阶跃响应(仿真)
3 闭环控制实验结果分析
实验用电机为Shinsei USR60型两相行波USM,采用基于DSP和CPLD的H桥相移PWM驱动控制电路,主控芯片为电机控制专用DSP芯片DSP56F801,CPLD主要用于实现H桥相移PWM控制信号发生器,电路输入电源电压为DC12V。
按照前述控制器设计结果,编写DSP程序实现极点配置广义PID转速控制器。当p=0.01时,对应于不同转速给定值的USM转速阶跃响应曲线如图3所示,响应速度较快,响应时间不超过0.65 s;略有超调,不超过10%。由于超声波电动机本体的制造偏差及其原理非线性,稳态时转速存在波动,闭环控制可减小波动幅度。
当p=0.03时,不同转速给定时的USM转速阶跃响应曲线如图4所示。响应速度慢于图3,响应时间不超过2 s;系统无超调。
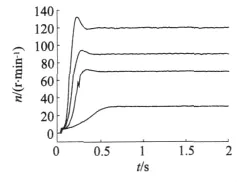
图3 不同给定转速时的转速测量值(p=0.01)

图4 不同给定转速时的转速测量值(p=0.03)
对比图3和图4可知,系统的动态性能的优劣依赖于极点位置的配置。极点取值小,闭环系统的响应速度快,适用于要求快速响应的场合。极点取值大一些,响应平稳性提高,适用于不允许产生超调或是对系统平稳性要求较高的场合。表1从响应时间、超调量和稳态转速波动最大绝对值等几个方面比较了不同闭环极点取值时的控制性能差异。
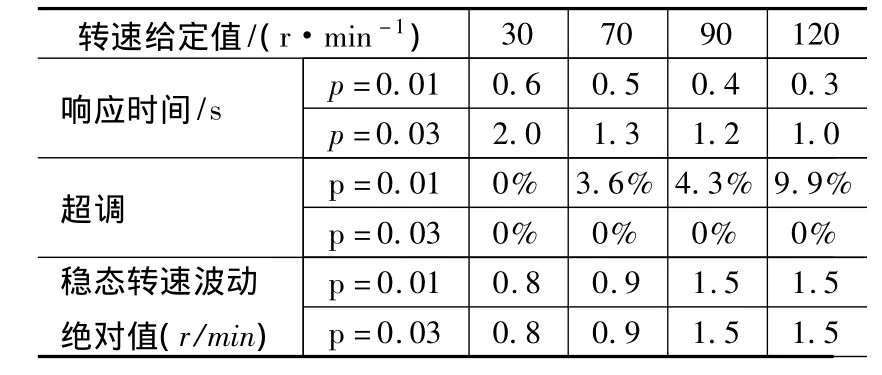
表1 闭环控制性能
对比实验结果与图2的仿真结果,响应时间存在明显差异。实验结果与仿真结果出现差异的原因在于,用于转速控制器设计的USM模型还不够准确。如前所述,超声波电动机是一种非线性时变严重的被控对象,难于精确建模并使之易于应用于控制。本文给出一种相对简单的USM实验辨识建模方法,设计并实现了USM转速的有效控制。实验结果表明,所建模型反映了超声波电动机动态特性的主要特性,使得依据该模型设计的控制器能够实现有效控制。
4 结 论
本文根据实测阶跃响应数据,采用系统辨识的方法获得USM模型,并根据该模型采用极点配置广义PID控制算法进行转速闭环控制器设计,实现了有效的USM转速闭环控制。得出结论如下:
(1)建立适合于控制应用的USM系统数学模型是对其进行分析、设计与性能评估的重要基础。同时也为提高USM运动控制装置的性能,研究更为合理的控制策略提供了条件。
(2)极点配置广义PID控制可以设计控制器参数使闭环系统的极点位于期望位置,从而使系统具有预期的控制性能。实验结果表明采用极点配置广义PID控制得到的USM转速控制效果良好。
[1] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[2]Senjyu T,Nakamura M.Mathematical model of ultrasonic motors for speed control[C]//IEEE Applied Power Electronics Conference and Exposition.Dallas,TX,United States,2006.
[3] 徐湘元.自适应控制理论与应用[M].北京:电子工业出版社,
2007.
