基于主动耦合干预的无级变速器速比控制
2012-11-30郝允志孙冬野秦大同林歆悠
郝允志 孙冬野 秦大同 林歆悠
1. 重庆大学机械传动国家重点实验室,重庆,4000442. 西南大学智能传动工程技术研究中心,重庆,400715
0 引言
瞬态工况占欧洲行驶循环工况(new european driving cycle, NEDC)和日本10-15循环工况行驶距离的比例均在30%以上,因此瞬态工况下的传动系统优化控制对提高车辆性能具有重要意义[1-2]。对于无级变速器(continuously variable transmission, CVT),优化速比控制,以合理的速比变化率跟踪目标速比,是提高车辆瞬态工况性能的关键。
为提高速比控制性能,需要对传动系统的特性进行研究。Kim等[3]、何仁等[4]对速比控制阀进行了试验研究,分别提出了优化的模糊控制算法和滞后补偿算法。Kim等[5]建立液压系统模型,设计了改进的PID速比控制算法。Kim等[6]、邓涛等[7]考虑传动损失、系统响应滞后和功率储备等因素,提出对发动机和变速器进行集成控制,设计了τ算法、转矩补偿算法和转速补偿算法。
夹紧力控制与速比控制之间具有耦合关系。现有的控制方法通常对速比和夹紧力进行独立控制,而不考虑两者之间的耦合关系[8-10]。分析表明,仅通过调节主动轮油缸压力来控制速比,不能充分利用液压系统的工作能力。为提高瞬态工况下的速比控制性能,本文提出对夹紧力和速比进行协同控制,利用两者之间的耦合作用,通过联合调节主从动轮油缸压力来干预速比控制,扩大速比变化率可控范围。从速比跟踪性能、经济性、动力性、工况适应性、传动可靠性和舒适性等方面,对耦合干预控制方法进行研究,研究结果表明该方法能够在不降低车辆原有性能的基础上,从多方面改善车辆性能。
1 速比变化率特性分析与试验
为建立准确的传动系统模型和设计控制算法,首先讨论速比变化率与车辆性能的关系,分析速比变化率的影响因素,并进行试验。
1.1 速比变化率与车辆性能之间的矛盾
速比变化率对车辆性能的影响主要包括两个方面:①从经济性和动力性方面考虑,提高速比变化率能够使发动机和变速器更快地过渡到目标工况,使发动机沿最佳经济/动力线等设定工作线运行;②从舒适性方面考虑,希望限制速比变化率,防止造成车辆顿挫或前冲而影响舒适性。由此可见,如果扩大速比变化率的可控范围,在速比控制中包含对速比变化率的控制,有利于进一步提高车辆性能。
1.2 速比变化率的可控参数
速比变化率的计算公式为
(1)

稳态下的主从动轮夹紧力之比为
(2)

(3)
在特定工况下,即速比i和主动轮转速np已知的情况下,Ki、RF、As和Ap由变速器的固有特性和结构决定,因此只能通过调节pp和ps来改变速比变化率。
1.3 速比变化率试验
主从动轮夹紧力与速比之间的关系难以精确地用解析式描述,夹紧力比值的理论值与实际值存在较大误差,因此式(3)中的Ki和RF通过CVT台架试验确定,在不同转速和系统压力条件下,突然改变主动轮油缸压力,根据速比变化曲线即可得到速比变化率,试验方法在文献[10]中已有论述。
RF主要取决于转矩比和速比,其中转矩比定义为RT=Tp/Tpmax,Tp是在系统压力ps和速比i时所能传递的转矩,Tpmax为其最大值。试验结果整理后如图1所示,该结果用于对速比变化率的分析和计算。
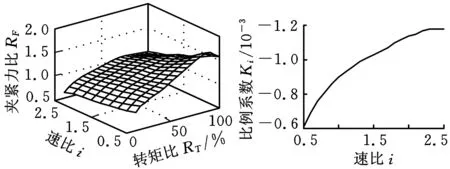
(a)RF的试验结果(b)Ki的试验结果图1 RF和Ki的试验结果
2 基于主动耦合干预的速比控制

2.1 主动耦合干预控制方法的基本原理
所谓主动耦合干预控制,就是对夹紧力和速比进行协同控制,利用两者之间的耦合作用,通过联合调节主从动轮油缸压力来干预速比控制,扩大速比变化率可控范围。速比控制包括速比增大和速比减小两种情况,下面分别论述。
2.1.1目标速比大于实际速比
由于降低速比变化率比较容易实现,因此只需研究该控制方法所能达到的最大速比变化率。根据式(3),为了得到最大速比变化率,将速比阀卸油口开至最大,则主动轮油缸压力pp迅速减小,可得
(4)
在特定车辆工况下,式(4)中只有ps可以直接控制,RF随ps的变化而变化。根据图1a容易证明,RFps随ps的增大而增大,则最大速比变化率为
(5)
可见,在速比增大时,如果在主动轮油缸压力降至最低时仍不能满足对速比变化率的要求,那么就需要通过增大从动轮油缸压力来实现。
2.1.2目标速比小于实际速比
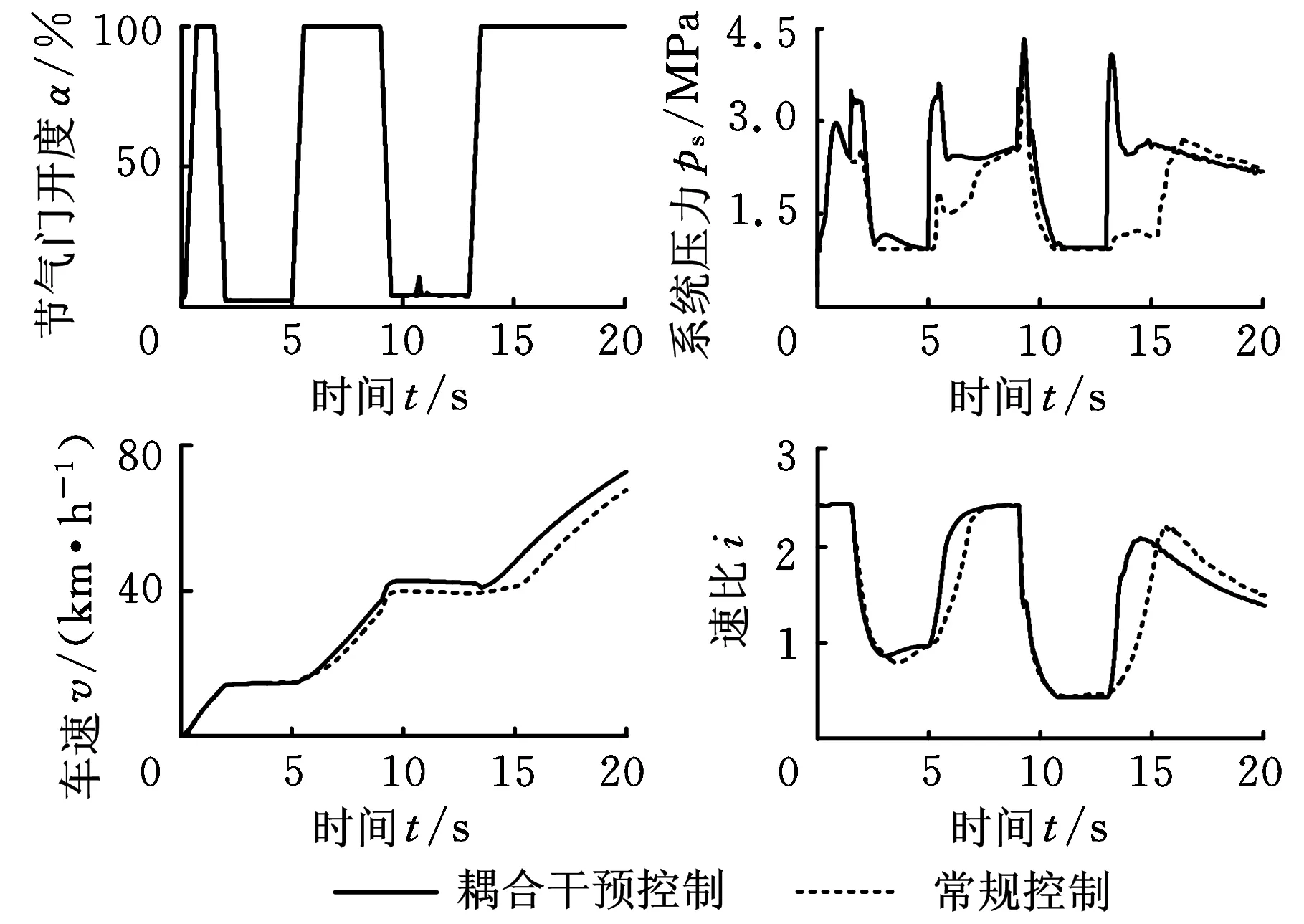
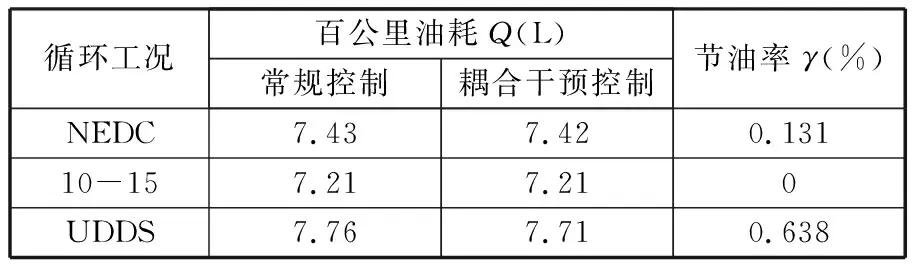
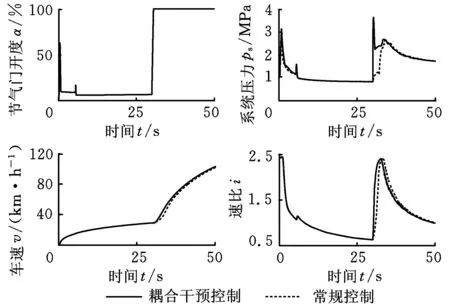
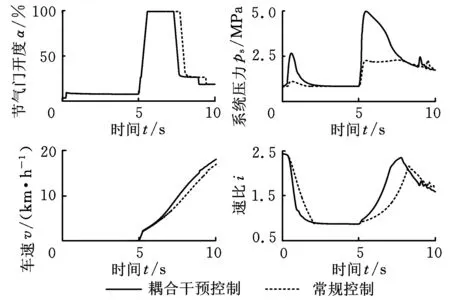
为了充分发挥液压系统所能提供的最大速比变化率,主动轮油缸压力pp应尽可能取最大值,当主动轮油缸压力低于最大值ppmax时,即pp 显而易见,为了提高速比变化率,在主动轮油缸压力达到最大值ppmax时,不应再继续增大从动轮油缸压力。根据式(3)可得 (6) 为了覆盖夹紧力比值范围,主从动轮液压缸工作面积需满足关系式:1-RFmax(As/Ap)>0,由式(6)容易得到最大速比变化率为 (7) 可见,当目标速比减小时,如果要提高速比变化率,在主动轮油缸压力低于最大值ppmax时,增大从动轮油缸压力即可提高速比变化率。 对比式(5)和式(7),由于psmax>ppmax,并且由图1a容易推出,RF>1-RF(As/Ap),所以在大多数工况下,增大速比所能实现的最大速比变化率大于减小速比所能实现的最大速比变化率,这对于提高动力性和安全性是有利的,因为CVT设计中对快速降挡的要求高于对快速升挡的要求。 2.1.3速比变化率可控范围 为了定量分析主动耦合干预控制方式对速比变化率可控范围的影响,下面以特定工况为例,分别对速比增大和速比减小两种情况进行估算。取Tp=50N·m,np=1500r/min,经计算,结果如表1所示。采用主动耦合干预控制方式,在速比增大和减小时,最大速比变化率增大为原来的3.04倍和1.26倍。由此表明,主动耦合控制方式对扩大速比变化率可控范围具有十分明显的效果。 表1 速比变化率可控范围比较 速比控制在很大程度上就是对速比变化率的控制。由于现有CVT中没有主动轮油缸压力传感器,不能根据目标速比变化率计算目标油缸压力,并对速比变化率采取简单的开环控制方式,故只能通过实际速比计算速比变化率,采取闭环控制方式。速比控制和夹紧力控制模型的结构如图2所示。 与传统的控制模型相比,该模型只增加了夹紧力修正控制器模块,其余的模块不作改动。借鉴现有文献中针对传动系统特性而设计的控制算法[5],夹紧力修正控制器采用带滞后补偿的分段PID控制算法。系统压力控制量由两部分组成:夹紧力控制器的输出控制量和夹紧力修正控制器的输出控制量。 设计夹紧力修正控制器应注意以下两点:①由于提高速比变化率是通过提高系统压力来实现的,所以实际夹紧力高于目标夹紧力,保证了转矩的可靠传递;②为了提高系统效率,需要在速比误差较小时,恢复传统的夹紧力控制,此时夹紧力修正控制器输出为零,以降低夹紧力和提高传动效率。 耦合干预控制仅在当前速比变化率不能满足要求时才提高速比变化率,旨在提供一种扩大速比变化率可控范围的方法,兼容现有的速比变化率限制方法。在速比控制中需要对速比变化率进行限制,避免对车辆舒适性造成不利影响,速比变化率限制方法已在许多文献中有论述,如根据工况计算速比变化率限制值[7],或直接以车速、加速度或发动机有效功率作为控制目标等。 为研究耦合干预控制方法的性能,将其与常规控制方法进行较为全面的对比,考察主动耦合干预控制方法的可行性和控制效果。前文已经对与夹紧力控制相关的传动可靠性、传动效率、与速比变化率相关的舒适性进行了讨论,下面对速比跟踪性能、经济性、动力性、恶劣工况适应性进行论述。 本文采用基于功率需求的控制策略,加速踏板开度代表驾驶员对车辆的有效功率需求。目标速比取决于加速踏板开度和车速,通过施加阶跃的加速踏板开度就可使目标速比发生突变。 行驶工况分为5个阶段:①车辆以大油门起步加速至13km/h左右,此时变矩器处于解锁状态,目标速比为最大速比;②加速踏板开度突然降至10%,目标速比减小,车速保持基本稳定;③加速踏板开度阶跃至最大值,目标速比突然增大,车辆处于急加速工况,变矩器在车速达到15km/h时闭锁;④车辆加速至40km/h左右时,加速踏板开度突然减小至10%,目标速比随之减小,车速保持基本稳定;⑤加速踏板开度再次阶跃至最大值,目标速比再次突然增大,车辆处于急加速工况。仿真结果如图3所示,整个过程包括变矩器解锁工况下的速比突增和突降,变矩器闭锁工况下的速比突增和突降,共计四种突变工况下的目标速比跟踪性能仿真。 图3 目标速比跟踪性能仿真结果 在工况①阶段,两种控制方法的车辆起步加速性能接近,这是因为起步时的初始速比和目标速比都是最大速比。整个起步过程的速比变化率处于较低水平,且设计液压系统时就保证了常规控制方法可以满足起步工况对速比变化率的要求。 在工况②和④阶段,目标速比减小,耦合干预控制方法使系统压力增大,速比变化率略有提高,速比误差平均减小11%。 在工况③和⑤阶段,目标速比增大,耦合干预控制方法使速比变化率有了较大提高,平均速比误差减小53%,加速性能优势明显。 为了分析耦合干预控制方法对经济性的影响,进行了循环工况仿真,结果如表2所示。通过暂时提高系统压力来调节速比变化率,在一定时间内,必然造成夹紧力增大而传动效率降低,同时液压系统损失也会增加。 表2 两种控制方式经济性对比 两种控制方式经济性对比结果表明,耦合干预控制方法对循环工况的燃油经济性影响较小,在美国城市道路工况(urban dynamometer driving schedule, UDDS)下经济性略有提高。这是因为耦合干预控制仅作用于目标速比快速变化的工况,而在循环工况中的目标速比变化基本都比较平缓。此外,速比变化率的提高使传动系统达到高效率目标工况点更快,弥补了因夹紧力增大而造成的功率损失。 在3.2节中已经讨论了起步加速工况,本节从超车加速工况考察动力性能。行驶工况设定为:①车辆正常起步,至车速基本稳定在30km/h;②为了超车,加速踏板开度突然开至最大,车辆进入急加速工况,仿真结果如图4所示。耦合干预控制方法提高了车辆的超车加速性能,从30km/h加速到60km/h加速时间缩短约0.7s。 图4 超车加速仿真结果 图4中显示,节气门开度阶跃为最大值后的短时间内,采用耦合干预控制方法的车辆加速性能与常规控制方法性能接近,大约1s后才开始表现出动力性方面的优势。这是因为急加速工况下的速比变化率处于限制值,发动机功率主要用于给自身和飞轮加速,传递至车轮的功率并未得到快速增大。 车辆由冰面打滑工况突然进入正常路面是一种比较恶劣的工况,对该工况进行仿真有利于考察耦合干预控制方法对工况变化的适应性。行驶工况设定为:①车辆驱动轮(前轮)位于冰面上,后轮位于滚动阻力较大的路面,车辆启动后随即进入打滑工况,并逐渐稳定;②驱动轮突然进入水泥路面,结束打滑过程,驾驶员加大油门使车轮快速脱离冰面,车辆加速行驶。虽然后轮随后也进入冰面,但由于后轮不提供驱动力,仅仅使车辆滚动阻力降低,因此对车辆的行驶状态影响较小。仿真结果如图5所示。 图5 驱动轮打滑工况仿真结果 车轮打滑工况属于轻载工况,目标速比较小,车辆驱动能力弱,在由低附着系数路面突然进入高附着系数路面时,需要快速提高驱动能力,要求速比快速增大。由图5可见,采用耦合干预控制法,在车辆进入正常路面时具有更好的加速性能,变矩器闭锁时间提前约0.5s,从而使车辆更容易通过具有低附着系数的路段。同时由于速比变化率的提高,更容易避免金属带的打滑,增强了对道路附着系数突变等特殊工况的适应能力。 (1)提出了基于主动耦合干预的无级变速器速比控制方法。利用夹紧力控制与速比控制之间的耦合作用,在保证传动可靠的基础上,通过联合调节主从动轮油缸压力来干预速比控制,暂时提高系统压力,扩大速比变化率的可控范围。 (2)从速比跟踪性能、经济性、动力性、恶劣工况适应性、与夹紧力相关的传动可靠性、与速比变化率相关的舒适性等方面,研究主动耦合干预控制方法的控制性能。对踏板开度突变工况、超车加速工况、车轮打滑工况和循环工况等工况进行仿真,结果表明:主动耦合干预控制法在保证可靠性、经济性和舒适性的前提下,改善了速比跟踪性能,提高了动力性,增强了对驱动轮打滑等恶劣工况的适应性,其中目标速比阶跃工况下的速比跟踪误差减小11%~53%,从30km/h加速到60km/h超车加速时间缩短约0.7s。 [1] Srivastava N, Haque I. A Review on Belt and Chain Continuously Variable Transmissions (CVT): Dynamics and Control[J]. Mechanism and Machine Theory, 2009, 44: 19-41. [2] Garbone G, Mangialardi L, Bonsen B, et al. CVT Dynamics: Theory and Experiments[J]. Mechanism and Machine Theory, 2007, 42: 409-428. [3] Kim T, Kim H. Low Level Control of Metal Belt CVT Considering Shift Dynamics and Ratio Valve On-off Characteristics[J].Journal of Mechanical Science and Technology, 2000, 14(6):645-654. [4] 何仁,夏晶晶,张涌,等. 基于滞后特性的无级变速器速比控制策略[J]. 中国机械工程,2009, 20(12): 1403-1406. [5] Kim P, Ryu W S, Kim H, et al. A Study on the Reduction in Pressure Fluctuations for an Independent Pressure-control-type Continuously Variable Transmission[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2008,222(5):729-737. [6] KimT, Kim H. Performance of Integrated Engine-CVT Control Considering Powertrain Loss and CVT Response Lag[J]. Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2002,216(7):545-553. [7] 邓涛,孙冬野,秦大同,等. 无级变速传动系统综合控制仿真与试验[J]. 汽车工程,2010, 32(1): 49-55. [8] 杨新桦,金国栋. 金属带式无级变速器控制任务的分解[J]. 汽车工程,2009, 31(11): 1017-1019. [9] Meulen S V D, Jager B D, Noll E V D, et al. Improving Pushbelt Continuously Variable Transmission Efficiency via Extremum Seeking Control[C]//IEEE ICCA’2009. Saint Petersburg, Russia, 2009: 357-362. [10] Gauthier J P, Micheau P. A Model Based on Experimental Data for High Speed Steel Belt CVT[J]. Mechanism and Machine Theory, 2010, 45: 1733-1744.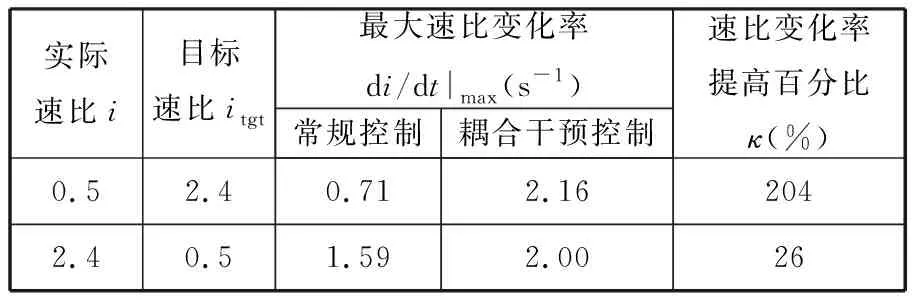
2.2 主动耦合干预控制方法的实现
2.3 传动可靠性和传动效率
2.4 速比变化率的限制与舒适性
3 耦合干预控制法的控制性能分析
3.1 目标速比跟踪性能
3.2 经济性
3.3 动力性
3.4 恶劣工况适应性
4 结论
