方向舵卡死无人机步出螺旋运动控制律的设计
2010-06-05陈淑琴赵文成席剑辉
陈淑琴,赵文成,席剑辉
(沈阳航空工业学院,沈阳 110136)
0 引言
尾旋问题是航空领域需要解决的一个重要问题,国外有关资料表明,在1960~1970年间,美国发生的严重飞行事故有近22%是由尾旋引起的[1],而无人机步入螺旋运动状态是尾旋的前期表现,步入螺旋运动后如果不及时对其加以控制,无人机很快会尾旋而坠毁。在无人机的飞行过程中,如果方向舵卡死,其横向稳定性与航向稳定性将会发生改变,当时无人机就会步入螺旋运动。
目前关于无人机螺旋运动的研究,据俄罗斯“搜索”网站2008年12月24日报道:为了避免空难的发生,俄罗斯中央空气流体动力学研究所正在开发避免飞机进入螺旋状态的专业技术;而国内对螺旋运动的研究甚少。
本文从方向舵卡死产生的影响出发,得出方向舵卡死无人机可能步入螺旋运动,进而仿真验证了此结论。并且进行了方向舵卡死只控制副翼改出螺旋运动控制律的设计,仿真结果验证了所设计控制律的可行性。
1 方向舵卡死产生的力与力矩
如图1所示,方向舵卡死在δy0,相当于垂直尾翼处侧滑角改变了 nyδy0,即:

式中:ny为方向舵效率。
由此侧滑角产生的侧力为

式中:acw为垂尾升力线斜率[5]。
侧力对重心产生的滚转力矩、偏航力矩分别为

式中:ycw为偏航力臂;Lcw为滚转力臂。
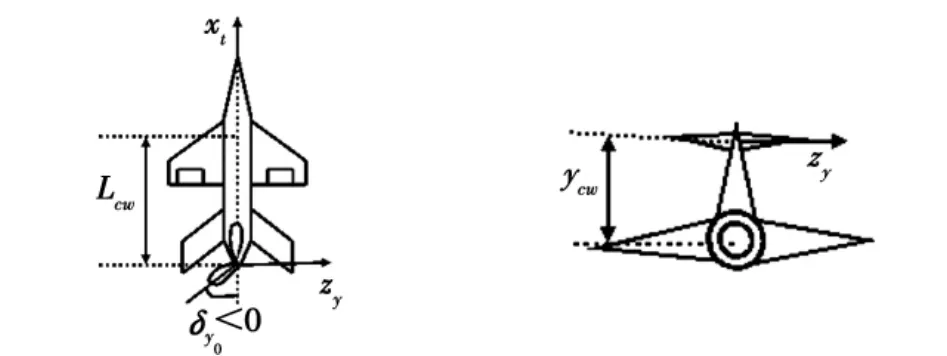
图1 方向舵卡死后的力矩分析图Fig.1 Moment analysis after the rudder deadlock
2 方向舵卡死与螺旋运动关系
2.1 理论分析
螺旋运动是同向的滚转与偏航运动,伴随着滚转与偏航,无人机的高度逐渐下降,滚转角逐渐增大。通过上面分析,方向舵卡死负的舵偏角,进而产生了正的滚转力矩与偏航力矩。根据螺旋运动的物理成因[6],在扰动后期无论无人机先出现滚转还是先出现侧滑,只要航向静稳定导数大于横向静稳定导数,它就会步入螺旋运动。
图2是以方向舵卡死先产生滚转运动为例,分析引起无人机螺旋运动的气动力矩(其中粗线路径为起主要作用的气动力矩)。
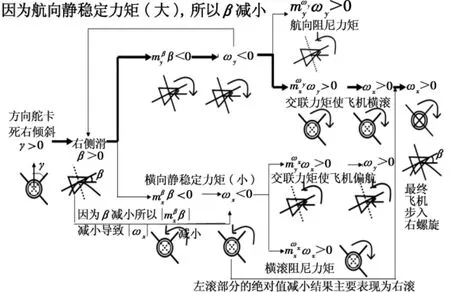
图2 影响螺旋运动的气动力矩Fig.2 Aerodynamic moment affect by the spiral motion
2.2 仿真验证
采用小型涡轮螺旋桨飞机A4D方向舵卡死在10°的气动数据[7],高度为 4550 m、马赫数为 0.9、速度为290 m/s。气动导数表如表1所示。
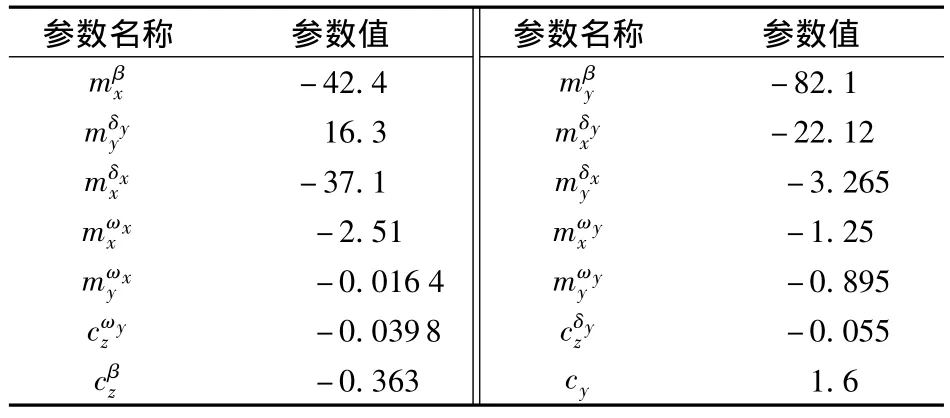
表1 气动导数表Table 1 The aerodynamic derivatives
方向舵卡死后滚转角、偏航角、滚转角速度和偏航角速度响应曲线如图3、图4所示。

图3 滚转角、偏航角响应曲线Fig.3 Response curves of roll angle and yaw angle
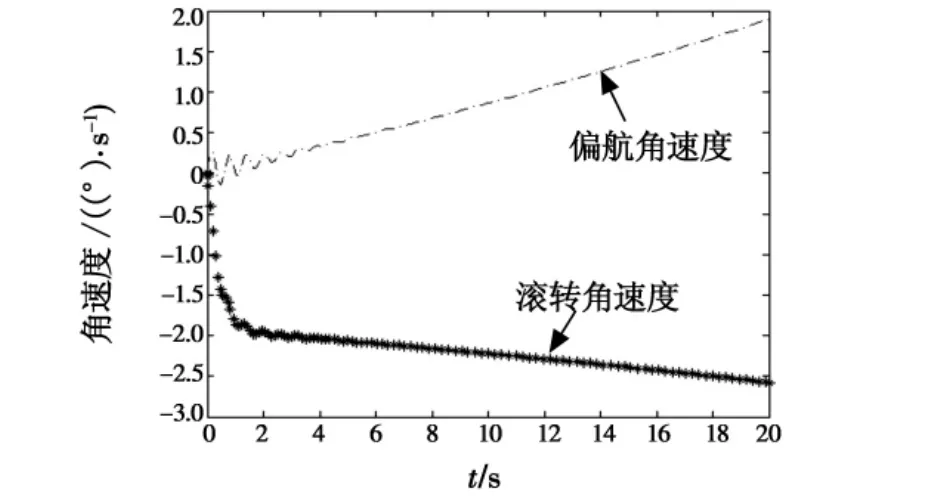
图4 滚转角速度、偏航角速度响应曲线Fig.4 Response curves of roll speed and yaw speed
从图3可以看出滚转角为负且为负向增长,说明飞机左滚;偏航角为正且为正向增长,说明飞机左偏航。同时图4中滚转角速度负增长,偏航角速度为正增长,同样说明飞机有左偏航、左滚转的趋势。总之图3、图4均说明在该状态下(即方向舵卡死),当航向稳定性大于横向稳定性时,如果不加以控制,飞机会步入螺旋运动。
3 步出螺旋运动控制律的设计
通过上面的分析方向舵卡死,并且横航向稳定导数满足一定的关系,无人机可能步入螺旋运动。而螺旋运动是横侧向的一种飞行模态,下面讨论如何设计横航向的控制律使无人机步出螺旋运动。
改出螺旋运动可以使无人机按指定的滚转角作倾斜飞行或是按指定的偏航角飞行。正常无人机保持这两种飞行状态时控制律的设计可以通过副翼、方向舵联合控制实现。方向舵卡死后不能用正常时的控制律,此时方向舵为不可控舵面,且方向舵产生的力矩会作为常值干扰影响横向与航向运动,所以实现这两种飞行只能通过控制副翼来完成。本文在方向舵卡死小角度基础上研究,具体实现方法介绍如下。
3.1 按指定角度倾斜飞行控制律的设计
在副翼通道中单独引入倾斜角反馈信号,滚转模态特性变差,如果无人机本身的横向阻尼较小时,滚转与螺旋模态容易耦合成衰减较慢、周期较长的振荡运动。所以内回路中同时引入滚转角速度反馈以提高螺旋运动的稳定性。外回路反馈滚转角的差值,以实现无人机步出螺旋运动并且按给定的倾斜角飞行。副翼的控制律为
在设置 Kγ1时,采用 PID 控制[9]滚转角反馈,取方向舵卡死在10°,滚转角保持在0°,Simulink框图如图5所示。
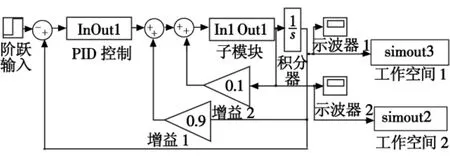
图5 倾斜保持框图Fig.5 The diagram of inclined keeping
仿真结果如图6所示。

图6 倾斜保持输出响应Fig.6 The output response of inclined keeping
仿真结果图6c为滚转角响应曲线,最终滚转角保持在0°,图6b和图6d为滚转角速度、偏航角速度响应曲线,最终均逐渐趋向于稳定状态。说明通过副翼的控制,实现了步出方向舵卡死后引起的无人机左滚转、左偏航的螺旋运动状态。
3.2 按指定偏航角飞行控制律的设计
方向舵卡死后步出螺旋运动可以使无人机按着指定的航向飞行。同步出螺旋运动按指定滚转角飞行控制律的设计类似,内回路同样用滚转角、滚转角速度反馈;外回路用偏航角度的差值进行反馈补偿。同样取方向舵卡死在10°,副翼通道的控制律为

采用PID控制偏航角,取方向舵卡死在10°,使无人机步出螺旋运动偏航角保持在17°飞行,其Simulink框图如图7所示。

图7 偏航保持框图Fig.7 The diagram of yaw keeping
仿真结果如图8所示。
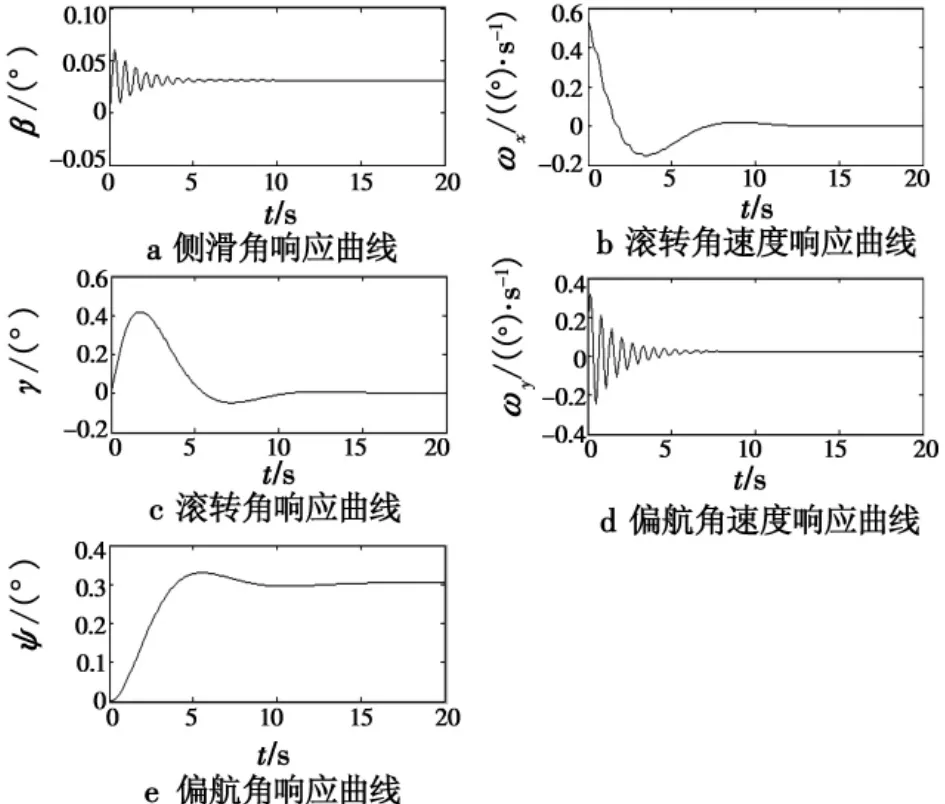
图8 偏航保持框图Fig.8 The output response of yaw keeping
图8e为偏航角响应曲线,最终偏航角保持在17°;图8c为滚转角响应曲线,最终滚转角保持在0°;图8b为滚转角速度响应曲线,图8d为偏航角速度响应曲线,最终均保持在0(°)/s上;图8a为侧滑角响应曲线,侧滑角最终保持在1.5°左右的一个小角度上。从各状态的保持值看出,无人机在该控制律下很好地实现了改出螺旋运动并且保持一定的偏航角飞行。
4 结论
1)无人机在方向舵卡死的情况下,当横航向稳定性发生变化后,其容易步入螺旋运动模态。仿真结果证明了结论的正确性。
2)无人机步入螺旋运动后,如果方向舵卡死在有限范围内,可以通过调整副翼设计合适的控制律,以改出螺旋运动状态,实现无人机按指定的滚转角或偏航角飞行。仿真结果证明了文中设计的控制律能够实现改出螺旋运动并保持一定的滚转角或偏航角飞行,说明所设计控制律的可行性。
文中控制律设计时运用了经典的PID控制,未来可以研究模型跟踪自适应方法或是特征结构配置方法修改控制律,以便设计的控制律更加精准、方便。
[1]高正红.失速计算方法与仿真软件[D].西安:西北工业大学,2003:3-5.
[2]ANANTHKRISHNAN N.Computational flight dynamicspresent status and directions for the future[J].Journal of Aerospace Sciences & Technologies,2003,55(1):1-5.
[3]REIGELSPERGER W C,BANDA S S.Nomlinear simulation of a modified F-16 with full-enbelope control laws[J].Control Engineering Practice,1998,6(3):309-320.
[4]STEINBERG M L.A comparison of intelligent,adaptive,and nonlinear flight control laws,A867863[R].Naval Air Warfare Center Aircraft Div Patuxent River MD,1999.
[5]孟维杰,关英勇,郝大琦.飞机操纵面功能余度研究[J].飞机设计,2006(1):56-58.
[6]徐鑫福,冯亚昌.飞机飞行操纵系统[M].北京:北京航空航天大学出版社,1989.
[7]肖顺达.飞行自动控制系统[M].北京:国防工业出版社,1980.
[8]席庆彪,袁冬莉,闫建国.无人机横侧向飞行控制系统研究[J].飞行力学,2004,22(4):16-18.
[9]李玮.无人机飞行PID控制及智能PID控制技术研究[D].南京:南京理工大学,1999:49-54.
[10]冯昊.无人机自动着陆控制[D].南京:南京航空航天大学,2003:34-38.
