基于背景差分的多车道车流量检测系统
2010-06-05郭怡文袁飞虎
郭怡文,袁飞虎
(武汉大学电子信息学院,武汉 430079)
0 引言
智能交通系统ITS[1]是一种实时、高效、全方位的综合交通运输管理系统。车流量检测作为其重要组成部分,为道路智能化信息管理调度与道路规划建设提供依据。目前得益于人工智能计算机视觉技术和硬件技术的飞速发展,图像和视频技术已经广泛应用于新一代智能交通系统中。国内常见的车流量检测方法有超声波检测、环形感应圈检测等主要方法。超声波检测精度不高,容易受车辆遮挡和行人的影响;环形感应圈检测精度高,但要求设置于路面土木结构中,对路面有损坏,不便于施工和安装。背景差分算法是一种基于视频流的运动检测技术,是一种结合数字图像处理和模式识别的技术[2],其效率高、开发成本低、检测准确率高;随着计算机技术和多媒体技术的迅速发展,自动控制和多媒体技术的融入,其使用范围将越来越广泛。
1 背景差分算法
背景差分的基本原理就是利用两帧图像之间的差来判断物体的出现和运动,背景差分法用序列中的每一帧与一个固定的静止参考帧(不存在任何运动物体)做图像差[3]。这种方法的优点是位置精确、速度快,满足实时处理的要求,因为它只需要获取当前的一幅图像。
背景差分方法检测效果的好坏在很大程度上依赖于背景图像的质量。背景图像会随着光照强度和方向的变化而缓慢变化。背景差分方法的优势可以获得完整的运动物体的外形,但关键在于找一个背景模型的自适应更新算法。在利用背景差分或帧间差分方法提取目标时,还必须选择适当的阈值。阈值的选取对目标分割效果影响非常大,不适合的阈值很可能使整个系统无法实现预期的设计功能。背景更新、阈值选取是背景差分算法的关键技术[4]。
1.1 背景估计
背景差分法是最常用、最有效的交通视频处理模式,而背景估计正是背景差分法的基础和核心环节。采用背景差分法进行运动检测,先要对背景进行准确的估计,再用当前图像和背景图像进行差分运算,并对差分图像进行区域分割,提取出运动区域。车辆交通序列图像间具有很强的相关性,仅仅利用单帧的信息进行处理容易产生错误,更好的方法是联合多帧的信息进行分析。基于这一思想,可以根据各个坐标处像素值在整个序列中的统计信息对运动场景的背景进行抽取。
背景估计有很多方法,本系统采用效果较好且效率相对较高的均值法,即任意像素点的背景信息由序列图像中对应像素点颜色的均值来确定,如式(1)所示。


图1 背景获取随N值变化的情况Fig.1 The effect of background acquisition
由图1所示,N取值越大合成背景越好。但实际上随着时间推移,光线不断变化,再考虑到时间因素,N取100~200就比较合适了。
1.2 背景更新
由于环境光线在不断地变化,要准确检测出运动车辆,需要及时对背景进行更新。获得初始图像以后,接下来就是在获得初始图像的基础上进行背景更新。通过计算当前帧和背景帧的差值,得到当前背景差分图像 DK(i,j),有:

对背景进行更新:

实验证明:上式中α取0.1时效果比较好,即表明在新的背景中,原来的背景占有90%的比例,这一点也是符合实际的,背景之间的变化只能是渐变的,所以在相邻的背景之间有着很大的相似性。利用上面这种动态的背景更新方法,可以获得比较理想的结果[5]。这种方法虽然在开始时要损失一段时间,用中值法来进行背景抽取,但是在得到理想背景的条件下,用二值背景差分图像来更新,可以减少计算量,确保系统的实时性。
1.3 阈值选取技术
对于不同光线背景下的差分图像,用固定的阈值T去进行二值化显然不能对每一帧图像都达到很好的效果。希望得到的阈值不仅可以将目标从背景中分离出来,而且要能根据不同的图像来智能地选取。1978年提出的Otus法以其计算简单、稳定有效而一直广为使用。由于车辆交通图像内容不太复杂、灰度分布较集中,所以本系统采用了Otus阈值化技术,以简化阈值的选取。Otus方法的基本思想:选取的最佳阈值T应当使得不同类间的分离性最好。
对于灰度级为0~255,M×N的一幅图像,记f(i,j)为图像点(i,j)处的灰度值。
Otus法具体步骤:
1)计算图像的直方图统计结果,得到灰度值为k的频率PHS(k)为

2)计算图像的灰度均值μT为

3)计算灰度类均值μ(S)和类直方图之和ω(S)为
4)计算类分离指标σB为

最后,求出使σB达到最大的值s,则最佳阈值T=s。
如图2所示的差分图像经过计算得到的二值化处理的阈值为T=35。Otus法求阈值不管图像的直方图有无明显的双峰,都能得到较满意的结果,这种方法是全局阈值自动选择的最优方法。
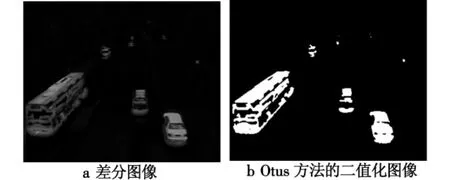
图2 Otus二值化方法处理效果图Fig.2 The result of thresholding image using Otus
2 基于虚拟检测线的车流量检测
2.1 虚拟检测线检测方法原理
在采集到的视频图像帧中,在每条车道上人为地设置一条横向或纵向的虚拟线,因为当有车经过虚拟线时,虚拟线上像素的亮度值会产生明显变化,所以根据此变化量是否超过设定的阈值判断此车道是否存在车辆。
2.2 检测线的选取与设置
检测线的长度以及具体放置范围应根据车流行驶轨迹的统计规律来确定。检测线水平放置于图像的中下部每个车道之上,如图3中横线所示,在此位置可以在一定程度上避免前车遮挡后车的问题。虚拟线的宽度设置为1个像素。由于摄像头俯视路面的角度影响,即使不同车辆运动速度相同,其在视频图像中的移动速度也不相同。检测线的长度设置为整个道路的宽度,这样即可实现对于各个车道车流量的检测。本系统中采取的是3条平行的检测线,其中两边的两条是主要部分,中间一条起辅助作用,设置如图所示。两边两条检测线的距离要求大于一个车辆背窗的长度,小于最短车辆的长度,大于最小车距,每隔一段时间检测一次。

图3 检测线设置Fig.3 Set of test line
当交通状况较好,路面车辆较少的时候,每隔5帧检测一次。若5帧内3条检测线有两条都检测到有物体通过,则认为有车通过,通过检测到横向位置的不同即可判断是哪个车道上的车。当交通拥挤,车辆行驶非常缓慢的时候,需相应降低本系统的检测频率,在此种条件下,检测精度会有所下降。
3 系统整体框架和软件处理流程
本系统在Windows XP操作系统下,使用Visual C++6.0编程实现。
具体来说,系统包括以下几个大的部分[6]。
1)图像获取。由CCD摄像机拍摄交通图像,并由图像采集卡进行模数转换,存入计算机内存中。
2)设定虚拟检测区域。根据摄像头和地面的距离以及所成的角度合理设置虚拟检测线圈的大小以及在图像上的位置。
3)运动目标检测。对存入内存的图像进行获取背景、预处理、二值化阈值分割和后处理,然后提取出车辆目标。
4)流量检测。根据流量检测的原理和判定标准来进行车流量的检测。
5)背景更新。为了让背景在系统整个工作过程中更好地适应光线变化,并且更新速度满足实时性处理要求,强制性地使背景每隔一段时间重新进行一次获取。可以根据统计信息,在每天车流量较小时重新开始获取背景。
详细的系统流程图如图4所示。
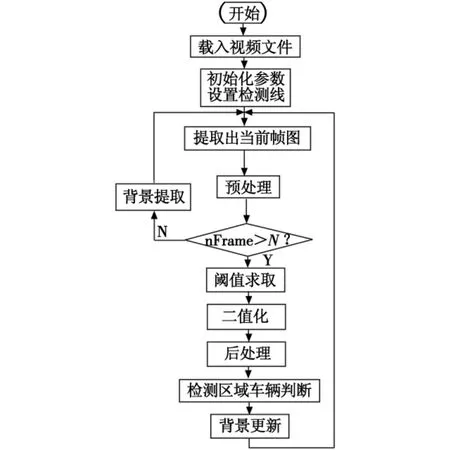
图4 系统软件设计流程图Fig.4 Software flow chart
4 系统测试结果分析
4.1 系统测试环境说明
本系统软件在Windows XP操作系统Visual Studio 6.0编译环境下编译调试,硬件配置为:双核 CPU,2.1GHz主频,4G内存。程序界面见图5。

图5 程序界面Fig.5 Software screenshot
4.2 评价标准
将程序数车的结果和人工数车的结果进行比较,用漏检率、虚警率、准确率作为指标来评价系统的性能,其各自定义如下:
漏检率=系统漏检车辆的数目/程序数车的总数量;
虚警率=系统多数车辆的数目/程序数车的总数量;
准确率=1-漏检率-虚警率。
4.3 系统测试结果及分析
系统在不同天气情况下测试了两组数据:一组是阴天,车辆没有阴影的影响;另外一组是晴天,车辆有阴影。每段视频时间都为2 min。实验测得数据如表1和表2所示。
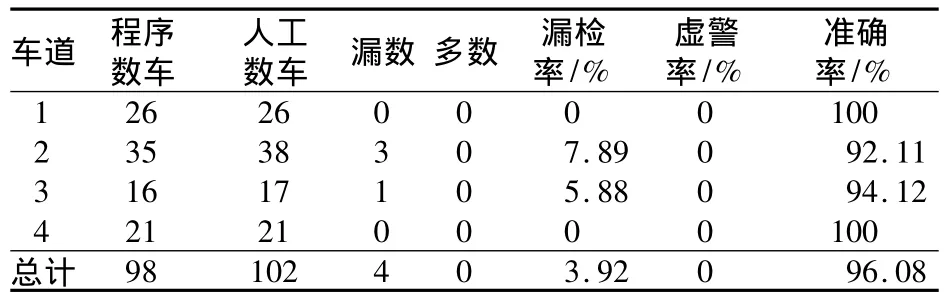
表1 阴天实验检测数据Table 1 Experimental data on cloudy day
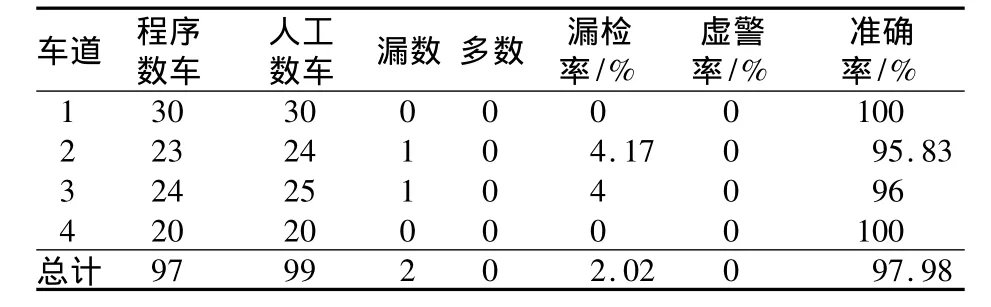
表2 晴天实验检测数据Table 2 Experimental data on sunny day
从以上实验结果可以看出检测系统的准确率较高,都在90%以上,阴天检测时系统的准确率有所下降,主要是因为光线的原因,造成车辆目标的提取出现一些误差。
5 结论
本系统基于背景差分算法和虚拟检测线实现检测,方案简单,成本较低,可用于嵌入式系统中。在计算机技术和人工智能技术越来越成熟的今天,视频监控处理越来越多地运用于交通领域,相信本系统的优越性能在实现智能交通管制领域有着广阔的用途。
[1]孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005.
[2]GONZALEZ R C.Digital image processing[M].Beijing:Publishing House of Electronics Industry,2003:1-27.
[3]ZHANG Juan,MAO Xiaobo,CHEN Tiejun.Survey of moving object tracking algorithm[J].Appliacation Research of Computers,2009,26(12):4407-4410.
[4]鲁力.基于运动检测的图像监控系统研究与实现[D].长沙:国防科学技术大学,2007.
[5]王栓.基于差分图像的多运动目标的检测与跟踪[J].中国图像图形学报,1999,4(6):470-475.
[6]潘秦华.车辆目标检测和交通流量检测系统的研究[D].西安:西安电子科技大学,2005.
