图像式头盔瞄准具定位模型研究与仿真
2010-06-05闫龙
闫 龙
(山东工商学院信息与电子工程学院,山东 烟台 264005)
0 引言
在现代作战环境中,战斗机驾驶员、武装直升机驾驶员都会在高速、低空或者全天候条件下飞行,在这种条件下,要求瞄准系统能够在大机动情况下操纵导弹导引头和机载雷达迅速截获目标,简化和加快大范围内的截获过程。
头盔瞄准具(Helmet Mounted Sight,HMS)是装在飞行员头盔上的一种瞄准装置,是一种重要的航空火力控制系统。头盔瞄准系统的种类较多,名称亦各不相同,除了保留头盔的保护和语音通讯功能外,主要功能有两个方面:一是测量飞行员头位,提供瞄准线;二是显示飞行和目标瞄准信息。利用头盔瞄准具将头部位姿变化引起的信号变化通过位姿检测系统转化为头部方位角、俯仰角的变化,从而根据人眼视线与头部转动的固定关系将人眼视线转化为目标瞄准线,将目标瞄准线转化为控制信号,实现通过头部转动改变视线方向来瞄准目标的目的。
头盔瞄准具常用的定位方法有以下几种:机电法、光电法、电磁场法、声学法以及图像识别法[1]。虽然每种方法都进入了实际应用,但依然存在很多问题和值得改进的地方,如在跟踪瞄准过程中,只考虑头部位置,未考虑人眼在跟踪瞄准过程中的功能;瞄准速度还不够快捷灵敏,有待进一步改进;头盔重量偏大(约4.7 kg),亟需减少重量。图像式的电磁干扰小、无噪音、运算速度快、结构简单。随着图像传感器的制造工艺的改进和处理器运算速度的提高,图像式的头盔瞄准具的研究越来越受到重视[2-3]。
专利显示美国早在20世纪60年代已经开始进行该方面的研究[4-5]。国内该方面的研究也在发展[6-8],在此背景下,本文分析了图像式头盔瞄准具的工作原理和定位模型,对关键问题进行了分析与讨论。
1 图像式头盔瞄准具工作原理
1.1 系统工作原理
基于图像识别技术的头盔瞄准系统中头盔外表面分布有发光装置,一般为结构固定的LED灯组。在头盔后方安装有一个或两个CCD测量摄像机,固定在飞机舱顶上或飞行员座椅上,CCD测量摄像机实时拍摄头盔上LED灯组的位置图像。根据摄像机拍摄的二维图像,应用视觉测量技术由LED灯在图像坐标系下的二维坐标计算出世界坐标系下的三维坐标,从而可以解算出LED灯组法线方向,并根据初始状态下分布在头盔表面LED灯组法线与头部转动一定角度后LED灯组法线的向量差值求出瞄准线参数信息,由瞄准线方向确定目标相对于飞机的方向,同时,计算机能够将测得的目标位置转化为瞄准指令,控制武器瞄准目标。工作原理如图1所示。

图1 图像式头盔瞄准系统工作原理图Fig.1 Working principle of HMS based on image
系统在头盔正后方放置两摄像机,采用单目测量方法。放置两摄像机的目的是为了扩大测量范围,提供冗余的定位信息。在头盔的外表面上安装3~5组LED灯,摄像机布置在飞行员座椅的后背上方,且飞行员头盔中心位于摄像机下前方。测量摄像机与头盔的位置关系如图2所示。
在头盔转动的过程中所有LED灯组只有一组点亮,该组应该是最适合摄像机拍摄并检测的一组。如何让合适的LED灯组点亮,本文暂不作讨论。每个灯组均由4个LED灯组成,构成三棱锥的形状。A,B,C 3个灯构成一个等边三角形,E灯在△ABC面上的投影是△ABC的重心,并且E灯到△ABC的距离已知。

图2 头盔瞄准测量系统示意图Fig.2 Line of Sight(LOS)measurement system of the HMS
随着飞行员头部转动及俯仰,头盔上的LED灯组的位置和角度也时刻发生变化。摄像机拍摄获得灯组的图像,应用单目视觉测量技术和灯组的结构可得到灯组的三维坐标。根据灯组与头盔的关系计算出视线的方向。
1.2 定位模型
定义飞机坐标系为世界坐标系,Zw正方向与飞机正前方相同,Yw正方向为飞机正上方,Xw正方向为飞机左方向;然后以摄像机透视中心O为圆心,Xc,Yc分别平行于Xw,Yw。Zc为摄像机主光轴,按右手法则建立摄像机坐标系O-XcYcZc;再以像平面上像素坐标值O1(0,0)点为坐标原点,水平阵列方向为u方向,垂直阵列方向为v方向建立O1-uv图像坐标系。同时建立头盔局部坐标系,头盔坐标系遵守右手法则,原点Oh建立在模型的中心位置,Xh轴指向头盔的左方向,Yh轴指向头盔的正上方,Zh轴指向头盔的正前方向。世界坐标系、摄像机坐标系、图像坐标系及头盔坐标系建立后可得关系示意图如图3所示。

图3 各坐标关系图Fig.3 Relationship of different coordinate systems
头盔在某一位置时摄像机探测到头盔表面点亮的一组LED灯组为ABC-E,经过摄像机成像后在成像平面得到的LED灯组的4个像点为abc-e。其成像示意图如图4所示。
已知灯组三棱锥的结构,要计算A,B,C灯的坐标[9]。这里 A,B,C 用 Wi来表示,设 vi是灯和对应图像连线上的单位矢量(从原点指向相应的灯),则Wi的坐标可通过式(1)获得。

上面3个点间的距离为

将式(1)代入式(2)得到关于ki的3个二次方程:


图4 LED灯组在摄像机中成像示意图Fig.4 Imaging of LED group in camera
解式(4)中3个函数的ki可得到A,B,C三个灯的坐标:
设初始值在[k1,k2,k3]的附近,但 f(k1,k2,k3)≠0,且有一个增量[Δ1,Δ2,Δ3],使得 f(k1+ Δ1,k2+ Δ2,k3+Δ3)趋向于 0。将 f(k1+ Δ1,k2+ Δ2,k3+ Δ3)在[k1,k2,k3]的邻域展开并略去高阶项,得到式(6)。让式(4)左边等于0,即可得到一个包含[k1k2k3]的偏微分线性方程。同样也可将式(4)中的函数g和h转化为线性方程。联合起来得到式(5):
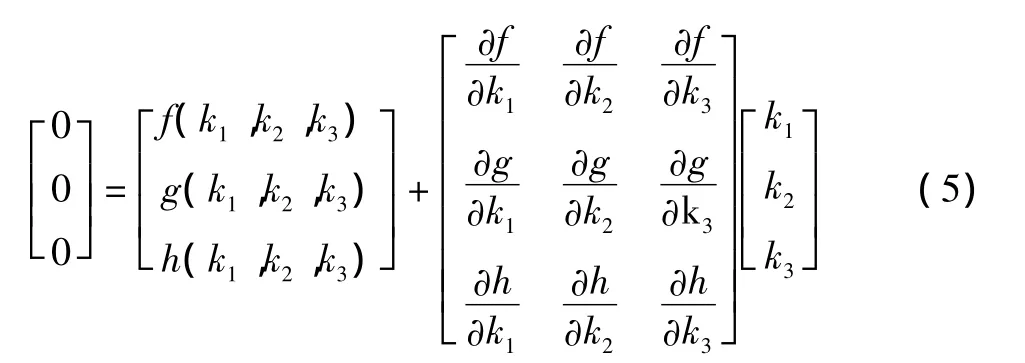
上述偏微分矩阵就是雅可比矩阵J。函数f(k1,k2,k3)的雅可比矩阵J具有式(7)的形式,其中vmn=vm·vn。


若雅可比矩阵J在点(k1,k2,k3)处可逆,则可通过式(8)计算出参数增量。
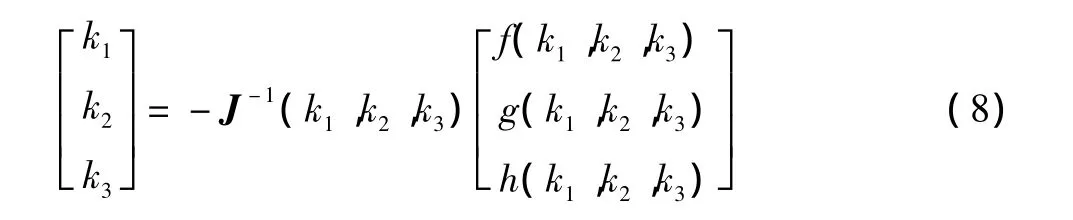
把上述增量与上一步的参数值相加,用Kl表示参数的第L步迭代值,就得到式(9)。通过牛顿迭代法可得到 k1,k2,k3。

由式(1)得到两组A,B,C点的坐标后,根据三点与E点之间的位置关系可以计算出E点坐标。采用E点坐标进行验证解的正确性,E点坐标、光心和E像点坐标成一条直线则可以判定该解为真实解。

由上式解得头部转动后平面ABC的法线,与初始状态下ABC法线比较可得头部转动的方位角、俯仰角和横滚角。
总结计算步骤如下:
2)迭代直到f(Kl)≈0,根据式(9)计算 Kl+1,如果或达到迭代次数,则停止计算;
3)计算四点坐标,用式(1)和Kl+1计算Wi,E点作为验证点;
4)计算位姿,根据式(10)计算头盔位姿以及头部转动方位角、俯仰角、横滚角。
2 定位模型分析与仿真实验
本节根据以上的定位原理及计算方法分析图像式头盔瞄准模型的误差来源和实时性,并通过仿真实验验证了该模型的可行性。
误差主要来源于系统标定、图像拍摄、图像校正、立体匹配环节。图像拍摄时可能会因为镜头结构和安装问题产生畸变,该问题已可通过在系统标定环节引入畸变系数来解决[11]。与传统立体匹配不同,系统使用不同颜色的LED灯,在立体匹配时采用不同颜色来定位不同LED灯可以很快完成匹配,既加快了匹配时间,又减小了误差。系统每帧图像的处理时间主要包括摄像机的拍摄时间、图像传输时间、图像处理及坐标计算时间。因为只需检测不同颜色的点,所以不需要太高的分辨率,以大恒图像的X-EMA军用高速摄像机为例,拍摄速率最高可达32000帧/s。PCI传输方式可以达到132 MB。图像处理及坐标计算每帧只需处理3~4个点,计算量均很小,几乎不占用CPU的处理时间。
利用OpenGL的透视投影渲染方法模拟相机的拍摄过程。经证明,OpenGL成像外参数矩阵和摄像机外参数是一致的;而OpenGL成像的内参数可通过改变矩阵设置成和所采用的摄像机系统的标定参数一致[12]。
具体步骤可按照以下来进行:
1)首先使用3dMax构建相关模型,包括头盔模型,机舱模型等;
2)用gMatrixMode(GL_PROJECTION)函数设置OpenGL的当前矩阵为投影矩阵;
3)根据摄像机标定结果建立并设置透视投影矩阵;
4)用gMulMatrixd(*point)函数将矩阵point加入当前的投射投影矩阵中;
5)调用glRotated函数设置摄影测量角度;
6)依据屏幕大小调用 glViewport(0,0,sx,sy)函数设置视口矩阵,sx和sy为窗口的宽和高。
仿真时,对头盔预先设定好坐标值称为预定坐标,经过测量得到测量后的坐标值称为仿真测量坐标。按照上述的步骤进行仿真,通过比较仿真测量坐标与预定坐标是否一致就能确定该定位模型的准确性。两摄像机物体中心的初始距离设计为150 mm。四面体为底面三角形的边长为80 mm,第4个顶点到底面三角形平面的距离为10 mm。头盔的中心位置在摄像机的下前方,在XOY平面上,头盔中心到摄像机中心的距离的X轴上为470 mm,在Y轴上的为350 mm。能够模拟视角±10°至±50°的摄像机。能够模拟摄像机的分辨率为:768×576,800×600,1280×1024,最好可以更自由地调整。转向范围为方位角±150°,俯仰角±60°,横滚角 ±45°。空间移动范围为前后方向 ±100 mm,左右方向±150 mm,上下方向±100 mm。
图5所示为仿真平台界面,在该平台中可同时观看3个方位的投影。
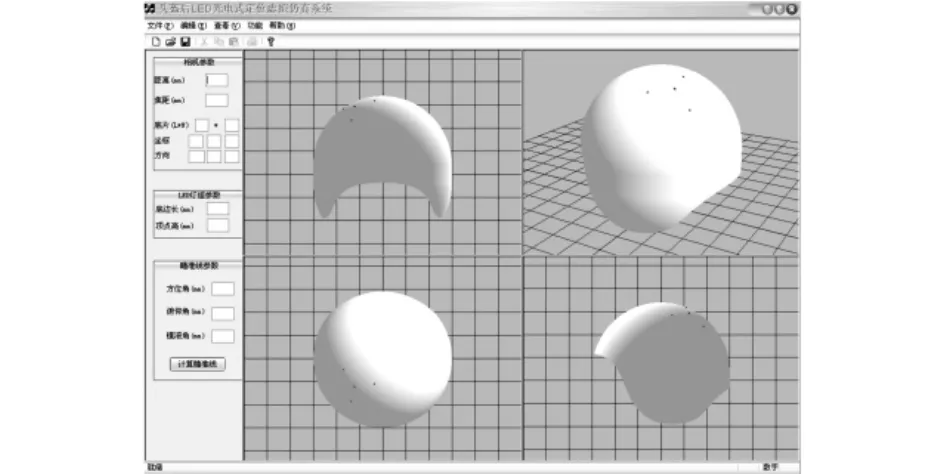
图5 仿真平台界面Fig.5 Simulation platform GUI
图6所示为应用OpenGL 模拟摄像机拍摄的图像,利用glFrustum()函数截取的棱锥体。
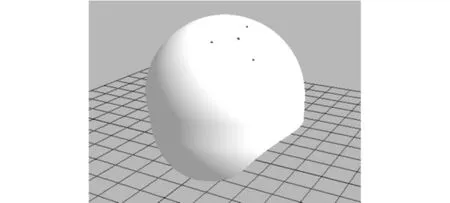
图6 头盔特征图像的获取Fig.6 Helmet eigen image acquirement
表1为头盔预定方向与仿真结果的对比,实际方向为仿真范围内随机生成数据,由测量结果可以看出在测量范围内相对误差都小于1.4%,符合设计要求。
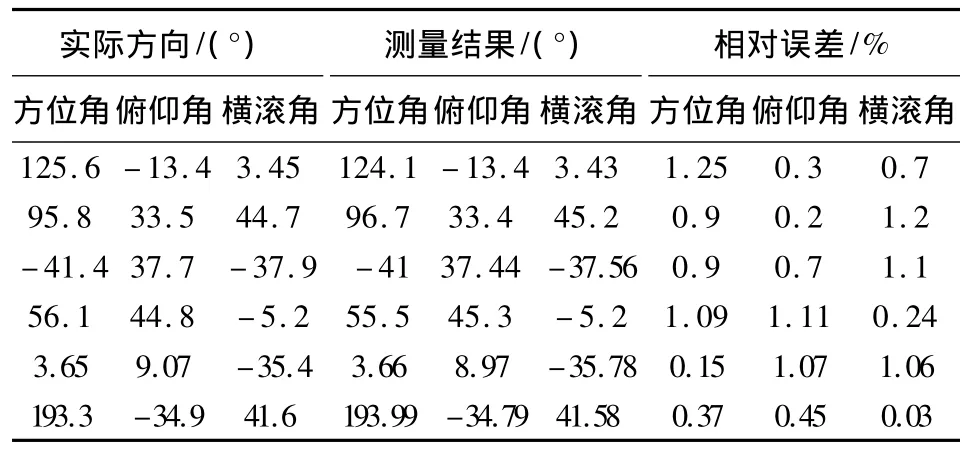
表1 预定坐标与仿真结果对比Table 1 The desired orientation and simulation result
3 结束语
本文对图像式头盔瞄准具的定位模型进行了分析并运用计算机仿真技术进行了工作过程的模拟及仿真。
系统中采用两个摄像机,扩大了测量范围,增加了系统冗余度。为了方便检测,将灯组中LED灯设置为不同的颜色,利用彩色摄像机拍摄彩色图像,分别检测出每个灯。节约了立体匹配的时间,提高了立体匹配的精度。
构建仿真平台进行定位过程的仿真,验证了定位模型的可行性。仿真平台不仅可以验证图像式头盔瞄准系统是否能够正常工作,也可以进行头盔模型的设计,可节省前期设计投入资金,可节约设计的流程及时间。实验表明,模型定位精确,计算速度快,能达到准确快速的定位要求。本文研究内容对于头盔瞄准系统分析与设计有一定帮助。
[1]赵兴方.基于OPENGL的头盔瞄准具虚拟仿真设计平台研究[D].济南:山东大学,2009.
[2]孟举,魏生民,罗兴贤,等.基于视频图像处理的头部位置跟踪方法的探索[J].航空精密制造技术,2007,43(2):29-32.
[3]LEE Y J,PARK C G,HONG S K.Helmet tracker system using stereo cameras[C]//SICE-ICASE International Joint Conference,2006:3636-3641.
[4]MENN A,KRIMERMAN J.System for measuring the angular displacement of an object[P].USA,4896962,1990.
[5]ZINTSMASTER L R.Wide-Eye helmet mounted display system for rotorcraft applications[J].IEEE AES Systems Magazine,1994,9(3):6-14.
[6]董耀荣,王永生.扩大光电头盔瞄准具探测范围的方法研究[J].电光与控制,1999,6(3):1-5.
[7]叶晓彤.国外瞄准具和显示器最新发展[J].情报指挥控制系统与仿真技术,2003(11):20-33.
[8]陈涛,袁东,吴衡.头盔显示/瞄准系统仿真技术研究[J].系统仿真学报,2008,20(8):2014-2017.
[9]章毓晋.图像工程(下册)图像理解[M].北京:清华大学出版社,2006.
[10]SHAPRO L G,STOCKMAN G C.Computer vision[M].ZHAO Qingjie,QIAN Fang,CAI Lidong,译.北京:China Machine Press,2005.
[11]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transations on Pattern Analysis and Machine Intelligent,2000,22(11):1330-1334.
[12]苏国中,郑顺义,张剑清,等.OpenGL模拟摄影测量方法研究[J].中国图象图形学报,2006,11(4):540-544.
