民用飞机方向舵抗鸟撞分析研究
2021-04-06耿立超吴志斌
高 俊 耿立超 吴志斌
(上海飞机设计研究院,上海 201210)
0 引言
飞机鸟撞指的是鸟体与飞行中的人造飞行器发生碰撞,造成伤害的事件。在2015年1月-12月期间,仅中国境内民航就发生了鸟击事件3 816起,较2014年增长13.07%,造成经济损失约1.2亿元[1]。据统计,1960年以来,飞机鸟撞至少已经导致了78架民机损失,201人丧生[2],因此必须对民机进行抗鸟撞设计与研究。
研究飞机结构抗鸟撞问题,通常有仿真分析和鸟撞试验两种方法,其中仿真分析具有迭代速度快、成本低、环保等优点,几乎成为学术研究和工程应用中必备的方法,近年来发展迅速,并形成了Lagrange方法[3-4]、Euler方法[5]、ALE(Arbitrary Lagrangian Eulerian)方法[6-7]、SPH(Smoothed Particle Hydrodynamics)方法[8-9]等多个方向。其中SPH方法是一种基于粒子的无网格方法,该方法把鸟体看作一组相互作用的离散粒子,通过内插值方法控制各个SPH单元,是一种具有无网格性、自适应性、稳定性以及Lagrange性的动力学求解器[10],克服了Lagrange方法不合适高速鸟体模拟和网格畸变问题、Euler方法不适合低速鸟体模拟以及ALE方法在大变形下的计算精度不足的问题[2,11],具有明显的优势。
本文通过SPH方法,使用PAM-Crash软件对某型民用飞机方向舵结构进行了抗鸟撞分析,得到了其结构损伤情况和铰链支座、作动器的受载情况,并根据相关适航条款对方向舵的鸟撞安全性进行了评估。本文还通过工程算法,对方向舵在不同偏角情况下鸟体对其撞击力进行了评估,筛选出了严酷工况,有效降低了分析计算的工作量。本文的研究思路,适用于现有适航条款下的民机方向舵的鸟撞安全性评估。
1 方向舵抗鸟撞设计要求
1.1 方向舵结构简介
某型方向舵位于飞机尾部,其翼型相对于机身对称面左右对称。方向舵通过连接铰链与垂直安定面后缘相连,方向舵铰链轴线位于机身对称平面,即居中设计。方向舵作动器通过操纵接头连接后缘舱和方向舵,通过方向舵控制其偏转,从而提供偏航力矩。方向舵舵面外形为曲率很大的弧形,接近于平面。
1.2 适航条款要求
CCAR25.631条款明确规定,“尾翼结构的设计必须保证飞机在与3.6 kg(8 lb)重的鸟相撞后,仍能够继续安全飞行和着陆,相撞时飞机的速度(沿飞机飞行航迹相对于鸟)等于按25.335(a)条选定的海平面Vc。通过采用静不定结构和把操纵系统元件置于受保护的部位,或采用保护装置(如隔板或吸能材料)来满足本条要求是可以接受的。在用分析、试验或两者的结合来表明符合本条要求的情况下,使用结构设计类似的飞机的资料是可以接受的。”[12]民用飞机方向舵作为飞机尾翼的一部分,必须满足上述条款要求。
需要指出的是,当方向舵发生偏转时,方向舵偏角受到实际空速的限制,因此鸟撞的速度不一定是Vc,而是相应偏转极限角度下的空速。
根据条款要求,方向舵在遭受条款规定的鸟撞后,仍需保证安全返航,即为了保证飞机方向舵结构满足鸟撞要求,方向舵受鸟撞后,需要保证:
1)方向舵翼面本体结构满足抗鸟撞要求;
2)多套方向舵作动器不能全部失效;
3)与方向舵连接的各铰链结构未发生破坏。
2 方向舵鸟撞工况筛选
由于方向舵结构位于垂尾后方,当方向舵无偏转时,鸟体无法撞击方向舵,此时方向舵无鸟撞安全性问题;当方向舵发生偏转时,该型飞机方向舵偏转极限随空速的变化规律如图1所示。由该图可知,随着飞机空速变大,方向舵限制偏角逐渐变小。因此,需要综合考虑速度及偏转限制的影响,挑选最严酷工况。
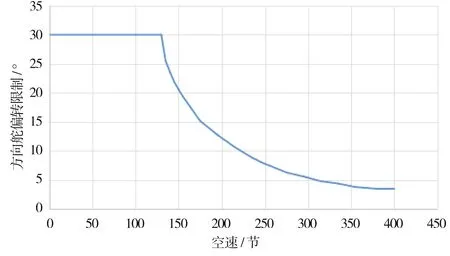
图1 方向舵偏转极限随空速的变化规律
本文采用工程算法[13]来初步评估鸟撞撞击方向舵的撞击力,从而筛选出严酷工况。
鸟体撞击方向舵翼面的示意图如图2所示。方向舵两侧壁板表面接近于平面,两平面夹角α约等于13°。方向舵偏角为β,鸟体撞击方向与撞击面的夹角为θ,则θ=β-α/2。鸟体的质量m为3.6 kg,直径为D,长度为L,速度为V,鸟体的有效长度为Leff。
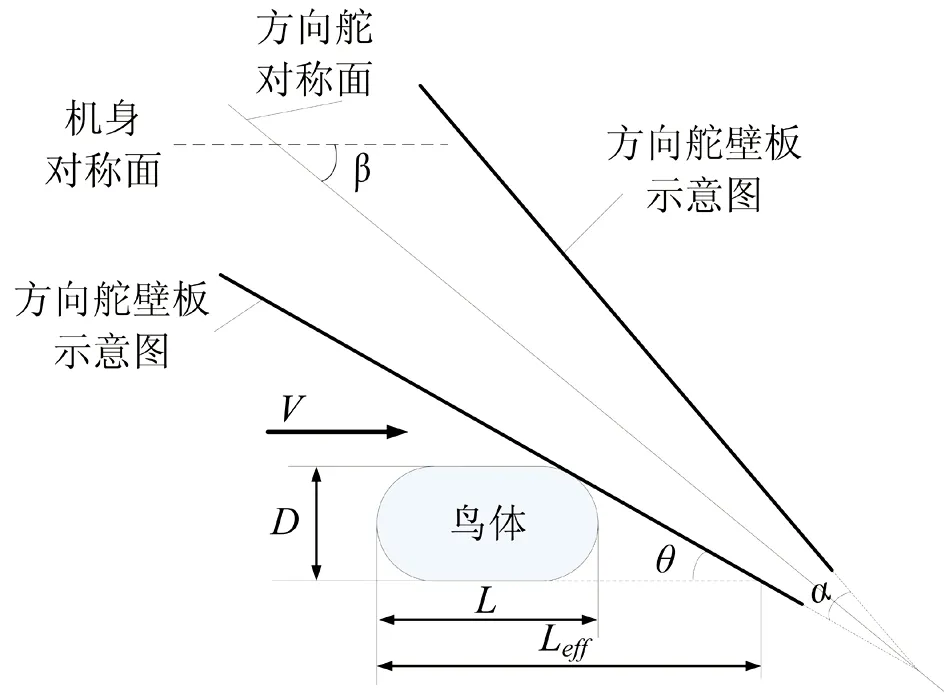
图2 鸟体撞击方向舵翼面示意图
其中本报告采用的鸟体D=140 mm,L=2D=280 mm,则鸟体的有效长度约为:
Leff=L+D/tanθ
(1)
鸟体撞击方向舵面的动量分量为:
I=mVsinθ
(2)
而载荷作用的时间为:
t=leff/V
(3)
由此可知,鸟撞击方向舵期间的最大撞击力是:
Fmax=2mV2sinθ/Leff
(4)
大量试验证明,上述经验算法是相对保守的,但是可以有效估计鸟体撞击方向舵面撞击力,避免了不同偏转角度带来的大量分析工作量,提升工作效率。
将图1中的偏角限制下的最大速度带入式(4)可以估算出鸟撞击方向舵期间的最大撞击力,图3给出了归一化的撞击力与偏角曲线图,其横坐标是方向舵偏转角,纵坐标是特定偏角下的撞击力与各偏角下最大撞击力之比。由图可知,当偏角小于α/2时,鸟体无法撞击方向舵表面,故这类工况下鸟体撞击力为0;当偏角大于α/2时,随着方向舵极限偏角的增加,鸟体对于方向舵的撞击力也越大,因此当方向舵偏角达到最大时,此时的鸟撞工况最严酷。

图3 鸟体对方向舵撞击力与偏角关系曲线
综上可知,当方向舵的偏角达到30°时,此时的撞击力最大,鸟撞工况最为严酷,与此对应的鸟体速度为66.8 m/s。因此,评估方向舵抗鸟撞性能时,只需要评估方向舵为30°偏角、鸟体速度为66.8 m/s时的鸟撞安全性即可。
3 方向舵鸟撞分析
3.1 分析方法
本文中涉及的结构动力学仿真分析利用PAM-Crash软件完成。其中采用SPH方法来模拟鸟体。鸟体的本构模型通过Mornaghan EOS定义。
(5)
式(5)中,P0表示初始压力,ρ0表示鸟体初始密度,本文取ρ0=9.6×10-7kg/mm3。B为体积模量,λ为状态参数。这两个参数通过分析与试验对标得到,本文经过试验验证后分别取B=0.128GPa,λ=7.98。
3.2 方向舵结构建模
在进行方向舵有限元建模时,其壁板、梁、肋等主要部件均采用shell单元模拟,蜂窝采用solid单元模拟,作动器活塞杆和小连杆采用bar单元模拟,作动器返力连杆采用beam单元模拟,紧固件采用PLINK单元模拟。方向舵结构完整的有限元模型如图4所示,作动器局部示意图如图5所示。方向舵模型中所使用的材料参数均经过试验验证。

图4 方向舵有限元模型
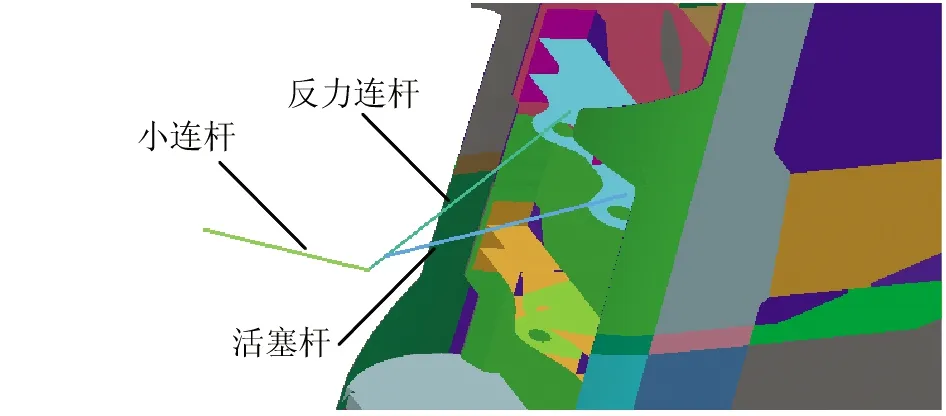
图5 方向舵作动器有限元模型(局部放大图)
3.3 边界条件定义
方向舵从下往上共有7个连接铰链,从下往上的编号分别为1#~7#。方向舵有三个作动器,自下往上分别是1#~3#,每个作动器通过两个铰链连接在方向舵上。
边界条件的定义主要是要尽可能模拟方向舵结构与垂直安定面的实际连接情况,对于1#、2#、5#、6#、7#连接铰链,约束其沿方向舵坐标系X和Z两个方向的平动,其典型约束示意图如图6所示;对于3#和4#连接铰链,约束其三个方向的平动,其典型约束示意图如图7所示。将作动器与垂尾后梁连接的铰链点在方向舵坐标系中三个方向的平动以及绕X轴、Z轴方向的转动进行约束,仅释放其绕方向舵坐标系Y轴方向的转动,具体约束情况如图8所示。
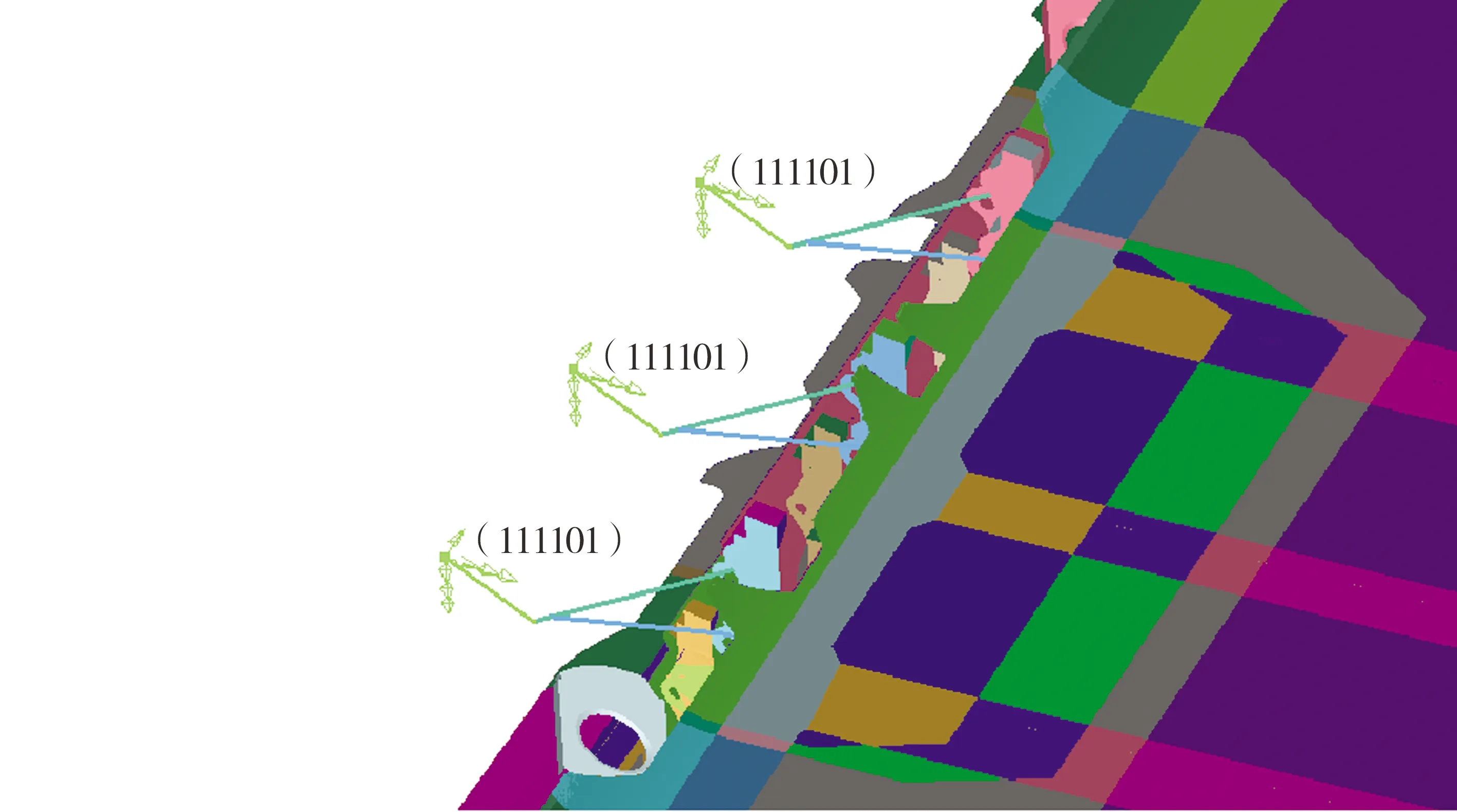
图8 作动器连接铰链约束情况示意图
3.4 方向舵鸟撞分析
为了全面评估方向舵的抗鸟撞能力,对方向舵偏角为30°时,鸟体可能的撞击位置,进行了多点分析。为避免叙述繁冗,本文只给出了图9所示的一个典型鸟撞工况的计算结果,该工况鸟撞后的结构示意图及结构损伤情况如图10和图11所示。图12则给出了该工况具有代表性的铰链载荷曲线;图13给出了该工况下鸟体撞击方向舵过程中具有代表性的活塞杆轴力、小连杆轴力、返力连杆支反力。
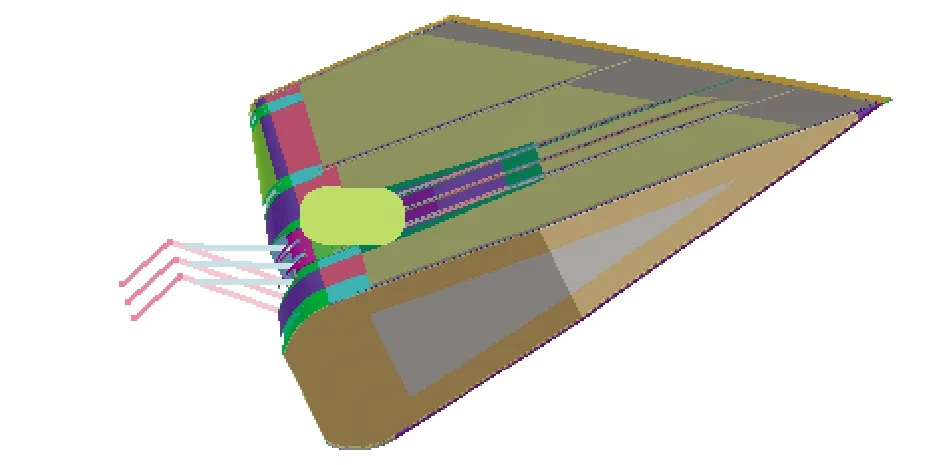
图9 鸟撞方向舵工作示意图(典型工况)
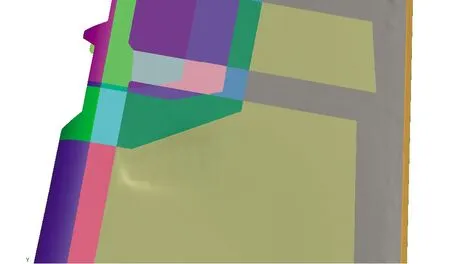
图10 鸟撞后方向舵局部视图(典型工况)
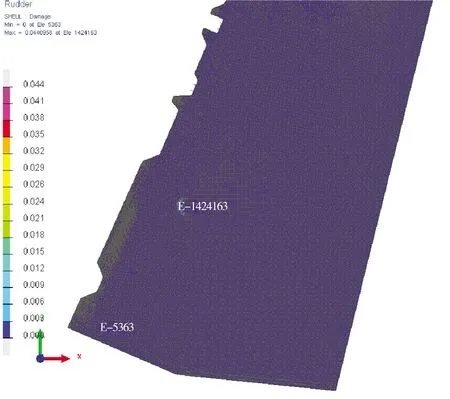
图11 鸟撞后方向舵局部损伤图(典型工况)

图12 4#连接铰链的鸟撞载荷曲线(典型工况)

图13 3#作动器鸟撞载荷曲线(典型工况)
通过图9~图11可知,方向舵翼面在鸟撞过程中保持完整,仅局部发生损伤,不影响翼面的整体承载能力,通过剩余强度评估可以证明方向舵在这种损伤情况下,满足返航载荷要求;
以图12中的连接铰链在鸟撞过程中的载荷的最大值进行评估后可知,该载荷下连接铰链不会失效,本文不详述静强度评估过程;
以图13给出的作动器各部件在鸟撞过程中的载荷最大值进行评估后可知,小连杆、返力连杆、活塞杆在鸟撞过程中不会失效,即方向舵作动器均不会失效,本文不详述静强度评估过程。
4 结论
本文对某型民用飞机方向舵结构的抗鸟撞能力开展了分析研究,并得到如下结论:
1)通过工程算法,筛选出了方向舵的严酷工况,可以有效降低方向舵鸟撞分析的工况数量。
2)根据方向舵鸟撞相关适航条款建立了一套具体验证思路,即需要评估:(1)舵面本体结构是否满足抗鸟撞要求;(2)方向舵与垂直安定面的连接铰链是否会失效;(3)方向舵作动器是否会失效,以完整评估方向舵的抗鸟撞性能。
3)分析结果表明,该型飞机方向舵抗鸟撞能力满足CCAR25.631条款要求。
