不同奖惩模式下塔机租赁企业安全投入行为决策演化博弈研究
2025-03-02张士彬杨其莹孙家坤















摘要:针对塔机事故多发、安全投入不足等问题,构建塔机租赁企业与政府间的演化博弈模型,找到最优的奖惩策略组合,以促进塔机租赁企业全面有效地安全投入。结果表明:动态奖励动态惩罚(DR-DP)模式能更好地促进企业落实安全投入和政府监管;塔机租赁企业安全投入行为也受政府奖惩力度的影响。研究结果对引导政府制定塔机安全管理政策和优化奖惩机制具有重要意义。
关键词:奖惩模式;安全投入;塔机租赁企业;演化博弈
0 引言
2024年4月,住房和城乡建设部发布的《关于开展房屋市政工程安全生产治本攻坚三年行动的通知》中,将健全施工安全事前预防机制放在首要任务,提出要从源头提升危大工程安全管控水平。尽管国家层面对建筑安全的重视程度不断提升,但由于市场竞争、资金短缺、企业安全意识淡薄等因素影响,建筑业安全投入存在严重不足,各类安全事故仍然层出不穷[1]。
当前,涉及塔机安全的文献多集中于技术研发[2-6]、事故统计[7-8]及施工现场监管[9-10]等方面,很少有研究从风险预防视角对安全投入进行分析。尽管法规和政策对于塔机的安全保障工作有明确要求,但在实际操作中,这些法规和政策并没有得到有效落实,部分塔机租赁企业对塔机安全重视不足,压缩安全方面的投入,仅配置低于市场标准的产品来应付政府监管[11]。因此,本文通过研究塔机租赁企业与政府的博弈行为,结合奖励与惩罚模式的动态调整,以有效促进塔机安全投入,进一步保障塔机安全;同时,为促进整个特种设备行业实现充分有效的安全投入提供了新的研究案例和管理思路,对促进特种设备安全管理的创新与发展具有重要意义。
1 不同奖惩模式下演化博弈分析
本文定义的塔机安全投入包括在设备上配置完备的塔机安全监测系统,以及在管理上对塔机司机进行正规培训、对闲置塔机进行定期维护保养等各项人力、财力、物力投入。为方便表达,以下分别对4种奖惩模式简化命名:静态奖励静态惩罚模式(SR-SP)、动态奖励静态惩罚模式(DR-SP)、动态惩罚静态奖励模式(DP-SR),以及动态奖励动态惩罚模式(DP-DR)。
1.1 基本假设
塔机租赁企业作为塔机相关安全产品配置和塔机司机的提供方,在政府进行塔机安全相关配置的监管中负有主要责任[12]。因此,本研究假设塔机安全投入主要涉及两个博弈主体:塔机租赁企业和政府部门。塔机租赁企业有两种策略选择:一是严格按照国家塔机安全生产相关要求,如配置有效的塔机安全监测产品,对司机进行规范培训,对塔机进行定期维护保养等;二是表面进行安全投入来应付政府部门的监管,如配置性能低价格低的安全产品、无事故不维保等投机行为。因此,塔机租赁企业的策略空间为{安全投入,表面安全投入}。基于陈兆芳等[13]的研究,政府监管的程度会显著影响主体的行为选择,因此,这里假设政府部门的策略空间为{强监管,弱监管}。基本假设如下:
(1)博弈过程中塔机租赁企业和政府部门都是有限理性的。政府部门对塔机安全投入进行强监管的概率为y,弱监管的概率为1-y;塔机租赁企业进行安全投入的概率为x,仅进行表面安全投入的概率为1-x。
(2)塔机租赁企业进行安全投入的成本为C1,表面安全投入的成本为C2,且C1>C2。
(3)塔机租赁企业不按要求进行安全投入导致塔机安全事故发生的概率为p,企业为此承担的损失为Q。
(4)政府部门监管成本为G3。当塔机租赁企业选择安全投入时,政府部门可以从企业安全行为中获得收益为G1,包括政治收益(如政府安全声誉提升)和经济收益(如企业安全投入提升,税收增加,预期收益增加)。同时,由于施工事故的发生具有负外部性,因此对事故所造成的社会损失设为L。
(5)在政府进行监管时,如果企业进行安全投入,则政府给予其奖励为K,如直接补贴、税收优惠、低息贷款等;如果发现企业仅进行表面安全投入(塔机安全配置等不合格),则政府对其进行的处罚为R,如责令设备召回、罚款等,且R+G1gt;G3。塔机租赁企业与政府部门的收益矩阵见表1。
1.1.1 演化博弈模型均衡点
由表1可知,在强监管情况下,塔机租赁企业选择两种策略时,政府部门的收益分别为-G3+G1-K,-G3-pL+R。在弱监管情况下,塔机租赁企业选择两种策略时,政府部门的收益分别为G1和-pL。塔机租赁企业和政府部门各有一定的概率来选择相应的策略,所以塔机租赁企业的期望收益如下:
塔机租赁企业选择进行安全投入时的收益矩阵,公式如下
V11=y(-C1+K)+(1-y)(-C1)
塔机租赁企业选择表面安全投入时的收益矩阵,公式如下
V12=y(-C2-pQ-R)+(1-y)(-C2-pQ)
塔机租赁企业平均期望收益,公式如下
V=xV11+(1-x)V12(1)
因此,塔机租赁企业的复制动态方程,公式如下
F(x)=dydt=x(1-x)[C2-C1+pQ+y(K+R)](2)
政府部门的期望收益,公式如下
V21=x(-G3+G1-K)+(1-x)(-G3-pL+R)
V22=xG1+(1-x)(-pL)
V=yV21+(1-y)V22(3)
同理可得政府部门的复制动态方程,公式如下
F(y)=dydt=y(1-y)[R-G3+x(K+R)](4)
由式(2)和式(3)可得一个二维动力系统I,公式如下
dydt=x(1-x)[C2-C1+pQ+y(K+R)]dydt=y(y-1)[G3-R+x(K+R)](5)
当满足0lt;C1-pQlt;K+R且0lt;R-G3lt;K+R时,可以得出系统I总共有5个均衡点,分别为:(0,0)、(0,1)、(1,0)、(1,1)、(x1,y1),其中(x1,y1)=(-G3+RK+R,C1-C2-pQK+R)。
若要使政府的奖惩措施发挥作用,需要满足对进行安全投入的塔机租赁企业进行奖励后得到的总效益大于对仅进行表面安全投入的企业给予惩罚的总效益,因此需要满足-C1+Kgt;-C2-R-pQ。因此,下文将以此为初始条件,对模型进行稳定性分析。
1.1.2 均衡点稳定性分析
演化系统均衡点的稳定性可以通过分析该系统的雅克比矩阵的局部稳定性得到。对式(1)和式(2)依次求关于x,y的偏导数,公式见式(6)。
根据Friedman提出的思想,如果存在均衡点,同时满足其所对应在雅可比矩阵中的行列式,当Tr(J)gt;0,Det(J)lt;0时则存在均衡点,实现演化稳定策略(ESS)。各均衡点所对应的雅可比矩阵稳定性分析结果,均衡点稳定性分析见表2。
1.2 SR-SP模式下数值仿真
公式中参数值的设定参考《中华人民共和国特种设备安全法》《安全生产预防和应急救援能力建设补助资金管理办法》等政策性文件,以及课题组进行企业实地调研获取的相关资料和数据。设定参数值如下:C1=70,C2=30,G3=30,R=70,K=20,p=0.03,Q=100。根据各参数初始值,求得(x1,y1)=(0.556,0.411),因此设(x1,y1)为系统初始策略。随之分别进行仿真验证。
当塔机租赁企业安全投入概率初始值x0=0.556时,分别取y0=0.2和y0=0.8作为初始值。当政府强监管概率初始值y0=0.411时,分别取x0=0.2和x0=0.8作为初始值。y0处于均衡点时塔机租赁企业安全投入概率演化路径、x0处于均衡点时政府监管力度演化路径如图1和图2所示。演化结果表明,当把x和y的初始概率分别设置为平衡点时,双方策略均无法自动达到均衡点。因此,考虑通过动态调整奖惩措施来优化原有策略,以达到双方收益均衡的目的。
J=F(x)xF(x)yF(y)xF(y)y=(1-2x)[C2-C1+pQ+y(K+R)]x(1-x)(K+R)y(y-1)(K+R)(2y-1)[G3-R+x(K+R)](6)
1.3 DR-SP下演化模式下博弈分析
1.3.1 基本假设
根据《关于2022年进一步强化金融支持小微企业发展工作的通知》等文件,政府鼓励银行等金融机构支持传统企业在设备更新、技术改造等方面的资金需求。因此,当塔机租赁企业为了提高塔机安全进行一系列安全投入而产生的投入金额较高时,政府可以根据其投入金额按一定比例给予补贴。如果塔机租赁企业安全投入较低,政府给予的奖励则很少甚至没有。因此,本文假设政府的奖励与塔机租赁企业进行安全投入的水平成正比。设置奖励系数K:k(x)=Kx。
此时,用Kx代替原式中的K,可得二维动力系统,公式如下
dydt=x(1-x)[C2-C1+pQ+y(Kx+R)]dydt=y(y-1)[G3-R+x(Kx+R)](7)
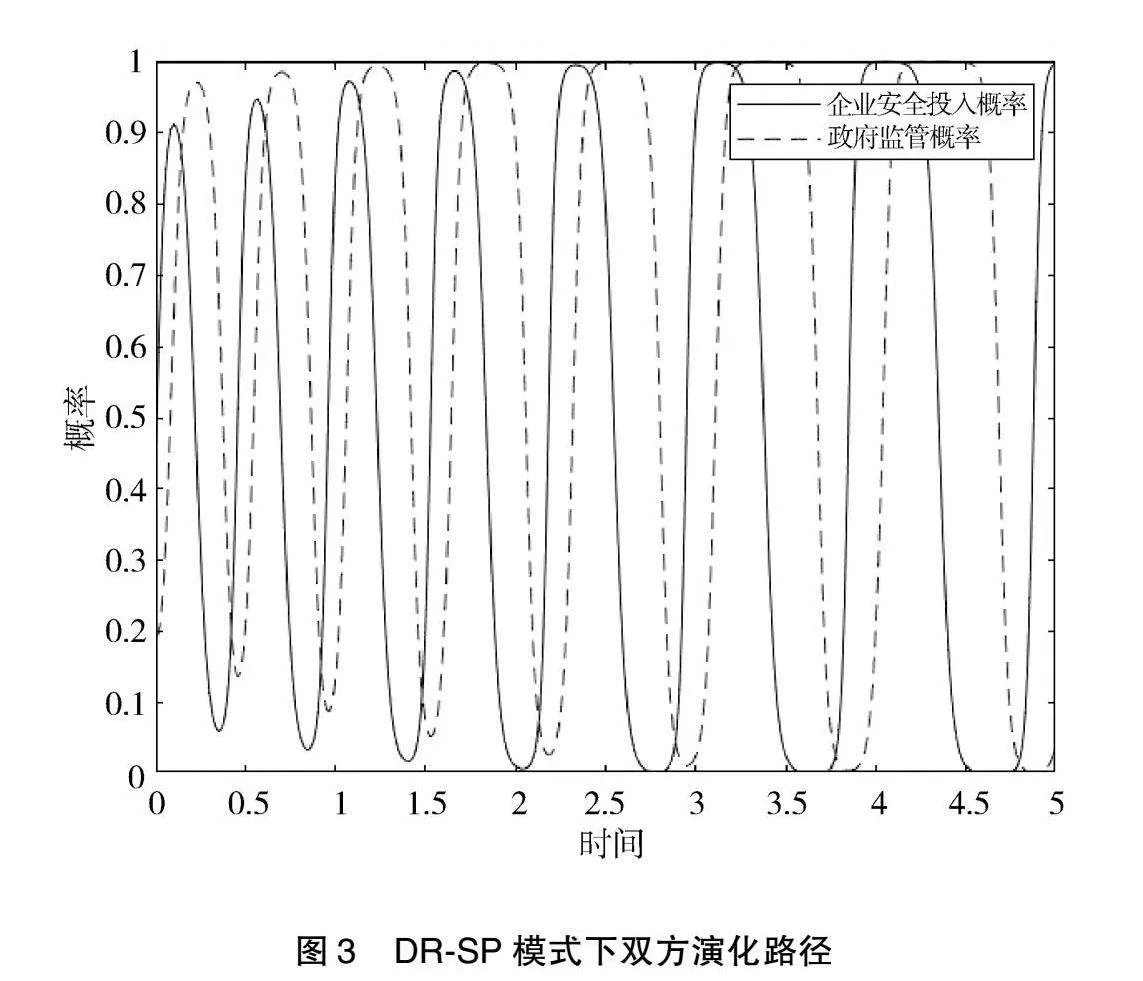
1.3.2 数值仿真
DR-SP模式下双方演化路径如图3所示。与SR-SP模式相比,随着时间和博弈次数的增加,双方的概率曲线震荡幅度逐渐增大,说明双方动态演化过程也更加不稳定。
政府可能随着时间推进,对不同的行业和企业制定不同的奖励政策和补贴力度。这种奖励力度的波动导致塔机租赁企业和政府双方在博弈过程中呈现不稳定。同时,由于政府的补贴金额与企业的投入金额成正比,企业可能会在考虑投入安全方面的成本和利益时进行优化,并考虑如何配置资源和投资以获得最大的补贴额。政府也会考虑企业的策略行为,以使政府的激励效果最大化。这种相互影响可能会导致双方在博弈过程中调整策略,使概率曲线产生不稳定的震荡和变化。
1.4 DP-SR模式下演化博弈分析
1.4.1 基本假设
政府对企业的惩罚与企业安全行为和安全投入力度有直接关联[14]。当塔机租赁企业进行安全投入的概率较高时,事故发生与政府惩罚的概率较小。当塔机租赁企业进行安全投入的概率较低时,事故发生与政府惩罚的概率较高。因此,本文假设政府的惩罚和塔机租赁企业进行安全投入的水平成反比。设置惩罚系数R,r(x)=R(1-x)。
此时,用R(1-x)代替原式中的R,可得二维动力系统,公式如下
dydt=x(1-x)[C2-C1+pQ+y(K+R(1-x))]dydt=y(y-1)[G3-R+x(K+R(1-x))](8)
1.4.2 数值仿真
DP-SR模式下双方演化路径如图4所示。双方的概率曲线在波动一段时间后逐渐形成一条较为平稳的曲线路径。可见在DP-SR模式下,政府和塔机租赁企业随着时间和博弈次数的增加达到理想的协同作用,并长期维持这一状态。此时,政府监管力度大约稳定在0.38,塔机租赁企业安全投入概率大约稳定在0.58。
惩罚通常具有更强的强制性和威慑作用。企业面临着遭到政府惩罚的风险和成本,这迫使企业在安全投入方面更加谨慎地进行决策,促使其加强安全投入以减少事故的发生。同时,在此模式下,政府并不会付出更多的奖励成本,因此能促使其更积极地加强监管。
1.5 DP-DR模式下演化博弈分析
1.5.1 基本假设
假设政府的奖励和惩罚都与塔机租赁企业的安全投入行为有关,分别用k(x)=Kx和r(x)=R(1-x)代替复制动态方程中的K和R,公式如下
dydt=x(1-x)[C2-C1+pQ+y(Kx+R(1-x))]dydt=y(y-1)[G3-R(1-x)+x(Kx+R(1-x))](9)
1.5.2 数值仿真
DP-DR模式下双方动态演化过程如图5所示。塔机租赁企业安全投入概率和政府监管力度随着时间和博弈次数的增加也可以达到纳什均衡,政府监管力度大约稳定在0.41,塔机租赁企业安全投入概率大约稳定在0.7。同时,与1.4章节的DP-SR模式相比,塔机租赁企业进行安全投入的概率和政府监管力度都在提高,可见动态奖励动态惩罚模式是最优的策略组合。
2 其他参数变化对系统演化路径的影响
由于前文研究结果表明DP-DR模式为最优奖惩策略组合,因此下文参数变化的仿真在该模式基础上进行。
2.1 奖励强度对塔机租赁企业和政府的影响
在保持其他参数不变情况下,随着政府最高奖励K的增加,塔机租赁企业安全投入概率和政府监管力度均呈降低趋势,并且当K值过高时,双方概率曲线又会形成上下震荡的不稳定状态。奖励力度对塔机租赁企业的影响、奖励力度对政府的影响如图6和图7所示。
该结果的主要原因可能是随着奖励的增加,企业增加安全投入的边际收益逐渐减少。在初期,奖励可能足以激励企业采取额外的安全措施,但若奖励程度过高,每增加1单位奖励所带来的额外安全投入的效用会递减。对于政府来说,一方面政府提高奖励成本会降低其监管意愿;另一方面,政府可能认为企业已经获得了足够的补贴和奖励去进行安全投入和自我监管,便减少了其作为外部监管的力度。但当奖励达到某个阈值后,监管的放松会导致安全问题的出现,进而促使政府重新加强监管,使概率曲线呈现震荡状态。
2.2 惩罚强度对塔机租赁企业和政府的影响
在保持其他参数不变情况下,随着政府最高惩罚金额R的增加,塔机租赁企业安全投入概率曲线和政府监管力度变化曲线在经历短期的震荡后,逐渐趋于稳定,且随着惩罚力度的提高,塔机租赁企业进行安全投入的概率升高,政府监管的概率则降低。惩罚力度对塔机租赁企业的影响、惩罚力度对政府的影响如图8和图9所示。
政府在加强监管方面可能受到资源限制的影响,导致政府难以全面覆盖监管领域。因此,政府可能会选择在惩罚力度较高的情况下减小监管力度,将有限的资源集中用于监管最高风险的领域。同时,随着政府最高惩罚金额R的增加,塔机租赁企业对违规行为的预期成本也会增加。企业会认识到违反安全规定可能会导致更高的罚款或损失。因此,企业更倾向于进行安全投入,以降低预期成本。
3 结语
本文运用演化博弈方法建立了塔机租赁企业与政府的博弈模型,分析了在不同奖励和惩罚模式下系统演化博弈及其平衡点稳定性;讨论了奖励和惩罚力度对塔机租赁企业和政府演化稳定策略的影响。本文结论如下:
(1)在SR-SP和DR-SP模式下,双方不存在稳定均衡策略;在DR-DP和DP-SR模式下存在稳定均衡策略,并且DR-DP模式能够更好地促进企业落实安全投入和政府监管。因此,政府应根据塔机租赁企业进行安全投入的力度和积极程度对奖惩方案进行及时、科学的动态调整。
(2)在改变奖励力度时,当政府奖励强度过高,双方策略会再次处于不稳定状态,并且奖励力度越高,塔机租赁企业安全投入概率和政府监管力度越低。同时,奖励越高也会给政府造成更高的监管成本,从而造成政府监管压力过大,给企业逃避监管提供了可乘之机。因此,政府应根据企业实际情况推进措施的实行。在进行补贴时,政府应对不同的企业采取不同的补贴方案,对于小微型困难企业,政府应给予适当补贴,并引导其进行安全投入;而对于有能力进行安全投入但抱有侥幸心理的大企业,政府应加大惩罚与监督力度,减少补贴。
(3)在改变惩罚力度时,当政府惩罚强度增加,企业安全投入概率增加,政府监管力度降低,监管成本降低。因此,政府应当对塔机租赁企业安全投入不到位、不规范的行为加大惩罚力度,较大惩罚力度能够产生较强威慑作用,不仅有利于增加塔机租赁企业进行安全投入的概率,还可以降低政府的监管频率,降低政府监督成本。
参考文献
[1]谢友财.高危行业企业安全投入与员工安全行为策略演化博弈分析[J].项目管理技术,2023,21(2):106-111.
[2]张延年,张学峰,张明展,等.塔机安全施工可视化监控系统[J].沈阳建筑大学学报(自然科学版),2022,38(3):559-564.
[3]何育民,韩莹,周晶.基于改进果蝇优化算法的塔机自适应滑模控制研究[J].工程设计学报,2023,30(3):271-280.
[4]LARS P A,LINE N,THOMAS J,et al.Social identity,safety climate and self-reported accidents among construction workerse[J].Construction Management and Economics,2018,36(1):22-31.
[5]张维,位尚万.基于深度学习的塔机健康状态实时诊断方法[J].工业建筑,2023,53(S2):775-776.
[6]胡欣,王生辉,常娅姝,等.基于STM32的塔机数据采集和监控系统设计[J].仪表技术与传感器,2024(4):53-58.
[7]郑霞忠,周佳丽,邵波,等.基于D-I的塔机作业物体打击事故致因分析[J].中国安全科学学报,2021,31(6):83-89.
[8]WEI Z,NANNAN X,JIANRONG Z,et al.Identification of critical causal factors and paths of tower-crane accidents in china through system thinking and complex networks[J].Journal of Construction Engineering and Management,2021,147(12):244184185.
[9]YUN C,QIN Z,XIA Z Z,et al.Safety supervision of tower crane operation on construction sites:an evolutionary game analysis[J].Safety Science,2022(152):105578.
[10]张振生.建设工程安全文明管理智慧化场景设计研究[J].项目管理技术,2024,22(3):113-116.
[11]RONG D.Customized ERP design of tower crane leasing company based on smart construction siteconcept[D].Xuzhou:China University of Mining and Technology,2019.
[12]刘文华,韩俊虎,王善科.技术提升推动建筑机械租赁企业发展[J].建筑机械化,2023,44(3):7-10.
[13]陈兆芳,葛雪慧,黄文翰.风险偏好视角下塔式起重机施工安全监管演化博弈分析[J].福建理工大学学报,2024,22(3):233-242.
[14]李智超,于翔,胡志平.从“亡羊补牢”到“未雨绸缪”:绩效挤出、全过程安全规制与安全生产治理[J].中国行政管理,2023,39(4):146-154.
收稿日期:2024-10-11
作者简介:
张士彬(1986—),男,博士,副教授,硕士研究生导师,研究方向:产业互联网、供应链管理、商业模式研究。
杨其莹(通信作者)(1999—),女,研究方向:企业数字化,安全管理。
孙家坤(1973—),男,博士,教授,硕士研究生导师,研究方向:工业工程与制造业信息化。
