SOGI级联SFNF的高频注入无传感器电机控制方法
2024-05-30李东昇袁杰王坤东
摘 要:
针对传统脉振高频电压注入法同时应用带通滤波器和低通滤波器导致相位偏移和位置估计误差大的问题,提出一种级联二阶广义积分器(SOGI)和单频陷波器(SFNF)的改进方法,实现位置误差信号的精确和实时提取。研究了脉振高频电压注入法位置观测闭环传递函数的幅频特性,利用SOGI的选频特性提取高频交轴响应电流,并利用SFNF的陷波特性滤除注入信号二次谐波,替代了传统误差信号提取环节中的带通滤波器和低通滤波器,参数整定简便,具备兼顾滤波精度和带宽的优势。搭建实验平台对传统误差信号提取策略和所提SOGI级联SFNF策略进行对比,实验结果表明,本文所提改进方法的响应速度和位置估计精度相比传统方法均有提高:在转速突变过程中转速估计误差降低5.9 r/min,转子位置误差降低0.11 rad;在突加负载时,转速估计误差降低3 r/min,转子位置误差降低0.08 rad,响应调节时间缩短42%,有效提高了位置观测精度和系统的动态响应性能。
关键词:高频注入法;无刷直流电机;无传感器控制;矢量控制;二阶广义积分器;陷波器
DOI:10.15938/j.emc.2024.03.003
中图分类号:TM351
文献标志码:A
文章编号:1007-449X(2024)03-0024-09
收稿日期: 2023-10-08
基金项目:国家重点研发计划(2021YFB3203104)
作者简介:李东昇(1999—),男,硕士研究生,研究方向为永磁无刷电机控制技术;
袁 杰(1991—),男,博士研究生,研究方向为电感传感器建模分析与设计;
王坤东(1978—),男,博士,副教授,博士生导师,研究方向为机器人技术及应用。
通信作者:王坤东
High frequency injection sensor-less motor control method with cascade of SOGI and SFNF
LI Dongsheng, YUAN Jie, WANG Kundong
(School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract:
In order to solve the problem of phase deviation and position estimation error caused by the simultaneous application of band-pass filter and low-pass filter in traditional high frequency pulsating voltage injection, an improved strategy of cascaded second order generalized integrator (SOGI) and single frequency notch filter (SFNF) was proposed for accurate and real-time extraction of position error signals. The amplitude-frequency characteristics of the position observation closed-loop transfer function were studied. The frequency selection characteristic of SOGI was used to extract the high-frequency cross-axis response current, and the second harmonic of the injected signal was filtered by the notch wave property of SFNF, which replaces the bandpass filter and low pass filter. It has the advantages of both filtering accuracy and bandwidth. An experimental platform was built to compare the traditional error signal extraction strategy with the proposed strategy. The experimental results show that the speed estimation error is reduced by 5.9 r/min and the position error is reduced by 0.11 rad under speed step condition. The speed estimation error is reduced by 3 r/min and the position error is reduced by 0.08 rad when load is suddenly applied, and the response time is shortened by 42%, which effectively improves the position observation accuracy and the dynamic response performance of the system.
Keywords:high frequency injection; brushless DC motor; sensor-less control; vector control; second-order generalized integrator; notch filter
0 引 言
近年来,随着稀土永磁新材料的开发研究,以及电力电子和自动控制技术的发展,永磁无刷电机的性能不断提升。该类型电机一般采用电子换向方式,具有功率密度高和效率高等优点,已逐步推广到军事装备、航空航天、工业自动化等需要高性能控制的领域中[1-4]。目前,无刷直流电机(brushless DC motor,BLDCM)多采用磁场定向控制方式(field-oriented control,FOC),FOC能准确控制磁场方向和大小,转矩和转速连续稳定可调[5],动态响应快。但坐标变换需要实时转子位置角度信息做反馈,需要安装霍尔传感器或光电式编码器等机械式位置传感器,这不仅增加了电机的制造费用和尺寸[6] ,而且降低了系统在高温、振动和电磁干扰等复杂工况下的稳定性[7]。因此,针对位置传感器的缺陷,电机无传感器转子位置辨识技术成为当前电机控制领域的重点研究方向之一。
无位置传感器控制基于数学模型和电磁特性,研究间接检测转子位置的方法[8]。基于基波模型的方法通过反电动势或者与基波激励相关的磁通量测算出转子位置信息,包括龙伯格观测器法[9],滑模观测器法[10-11],模型参考自适应法[12]和扩展卡尔曼滤波法[13-14]等,这些方法在电机运行中高速时有较好表现,但低速时由于反电动势微弱,信号信噪比较低,位置估计误差显著增大,启动时通常依赖开环拖动[15]。为了将无传感器控制延伸到零低速区间,研究者提出了基于电机凸极性跟踪的高频注入法,主要分为旋转高频注入法[16-18]和脉振高频注入法[19-22]。前者一般用于凸极率较大的磁片内埋式电机的转子位置检测,后者将适用范围拓展至隐极性的磁片表贴式电机,且工程上易于实现,具有较高的应用价值。
位置估计精度是电机无传感器控制性能的重要保障。脉振高频注入法从高频电流响应中提取出有用信号并解调得到位置误差信号,这一过程是影响位置辨识误差和动态性能的关键。传统的脉振高频电压注入法采用带通滤波器(band pass filter,BPF)提取交轴电流响应,并用低通滤波器(low pass filter,LPF)解调出包含位置误差信号的分量,但这两个滤波器的引入不仅增加了转速电流双闭环环路以及位置辨识环路参数整定的难度,而且导致了相关信号的相位延迟,限制了位置观测环带宽,严重影响无感控制的动态性能和位置辨识准确度。为此,文献[23]基于双频陷波器改善了误差信号提取方法,提高了带宽和滤波能力,但由于直接调制交轴电流,仍需使用LPF去除逆变器开关频率次谐波,导致系统延时增大;文献[24]提出基于递推离散傅里叶变换解调电流,从而克服滤波器延时缺陷,但硬件计算负担增大;文献[25]采用方波注入,提取信号时无需低通滤波器,动态特性好,但随着注入频率升高,电感损耗和谐波有所增大。
本文基于脉振高频电压注入法,结合FOC实现BLDCM低速域无位置传感器控制,分析传统误差信号提取策略的不足,提出一种级联二阶广义积分器(second-order generalized integrator,SOGI)和单频陷波器(single frequency notch filter,SFNF)的改进型误差信号提取策略,兼顾位置观测环的动态性能和估计精度,解决传统方法中误差信号提取环节滤波精度低和动态响应慢的问题,提高脉振高频电压注入法的性能,最终通过搭建实物平台,与传统高频注入法进行实验比对,证明本文提出的方法有效可行。
1 无刷直流电机的脉振高频电压注入法
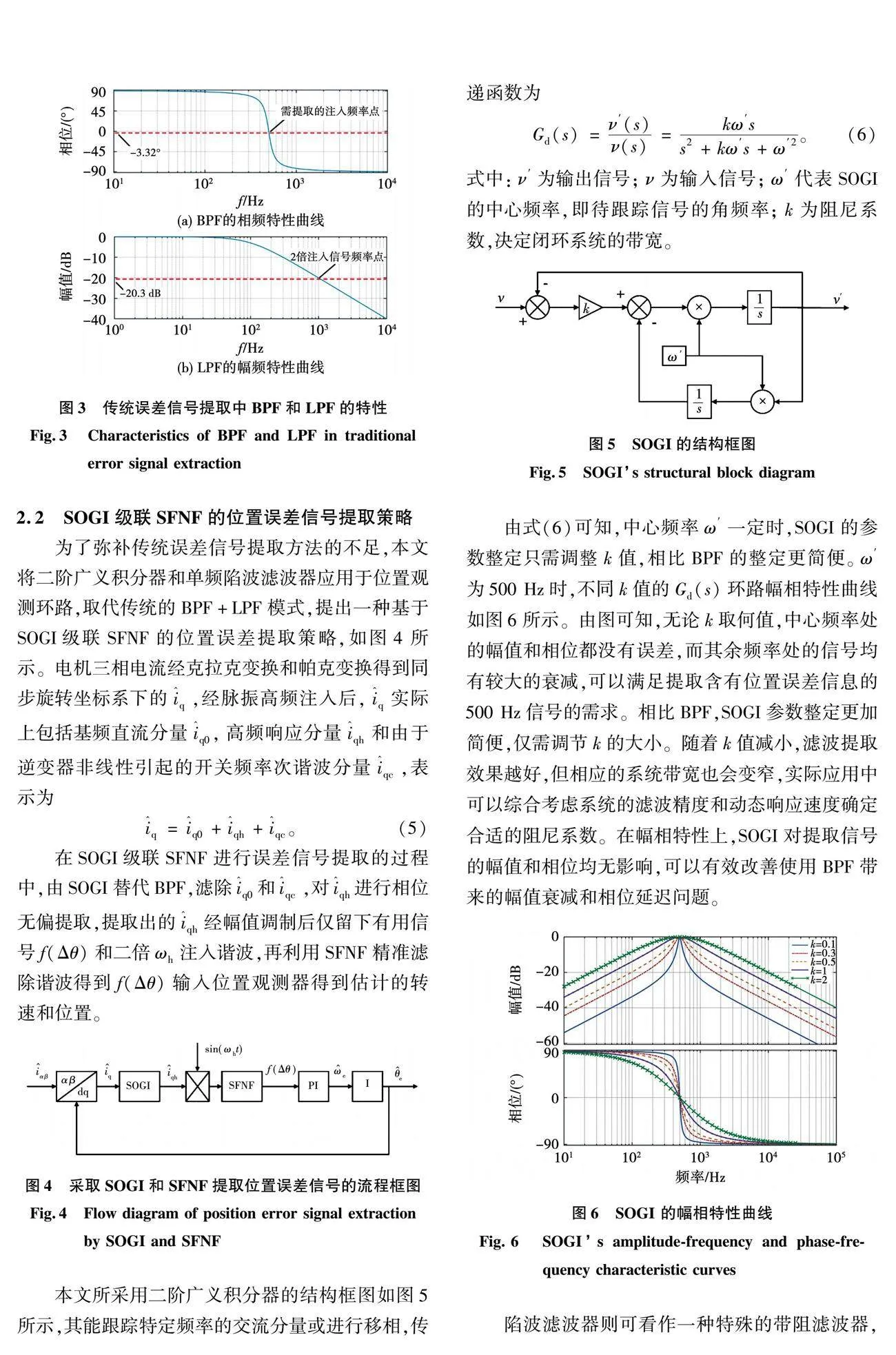
基于脉振高频电压注入法的电机控制系统如图1所示。本文所研究的电机为磁片表贴式隐极三相无刷直流电机,在直轴方向注入一个高频正弦电压信号以激发电机的饱和凸极性效应,从交轴提取响应电流并经过信号调制解调实现转速和位置的估计,估计出的转子角度反馈于FOC的坐标变换中。
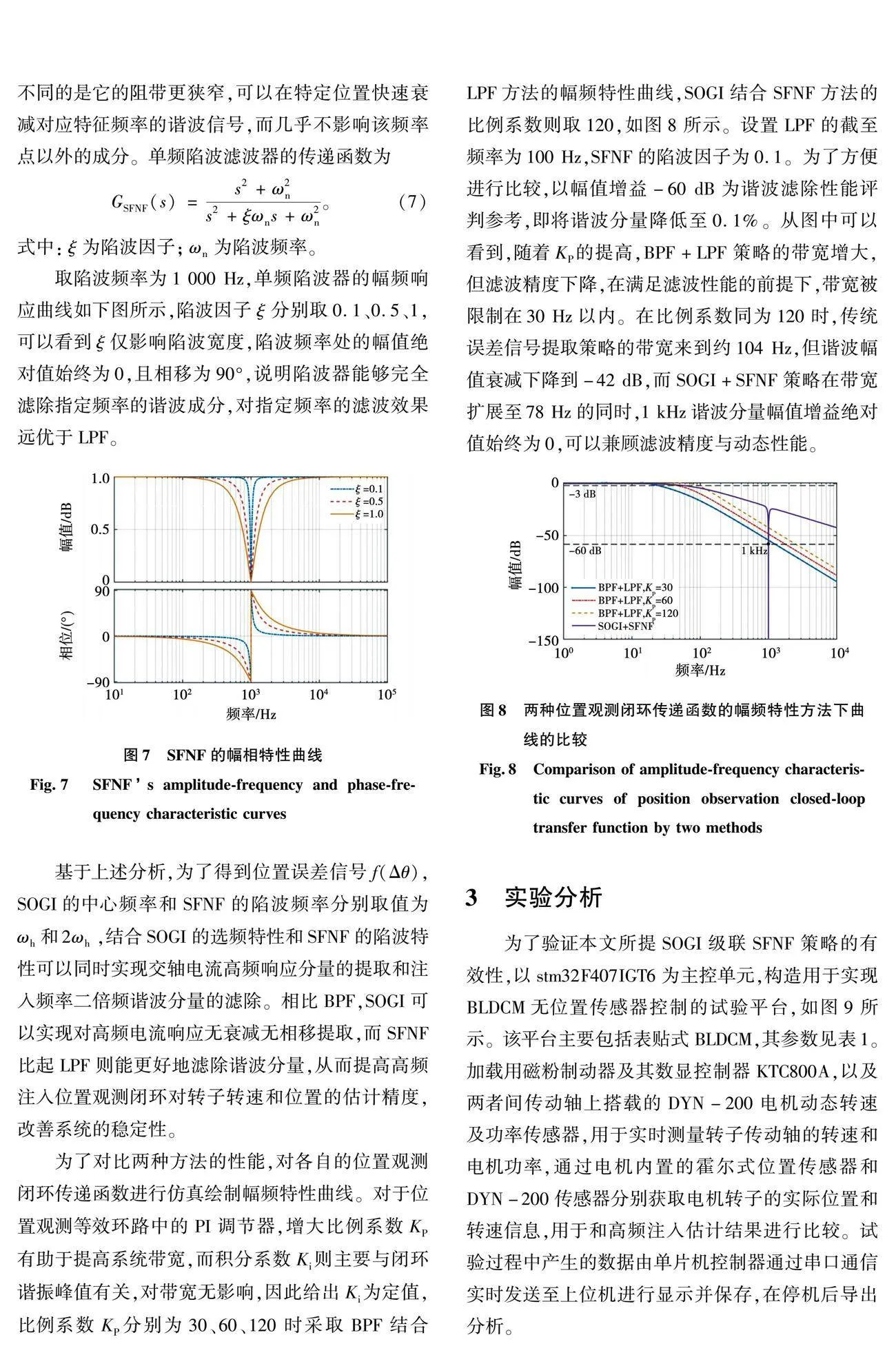
基于上述分析,为了得到位置误差信号f(Δθ), SOGI的中心频率和SFNF的陷波频率分别取值为ωh和2ωh,结合SOGI的选频特性和SFNF的陷波特性可以同时实现交轴电流高频响应分量的提取和注入频率二倍频谐波分量的滤除。相比BPF,SOGI可以实现对高频电流响应无衰减无相移提取,而SFNF比起LPF则能更好地滤除谐波分量,从而提高高频注入位置观测闭环对转子转速和位置的估计精度,改善系统的稳定性。
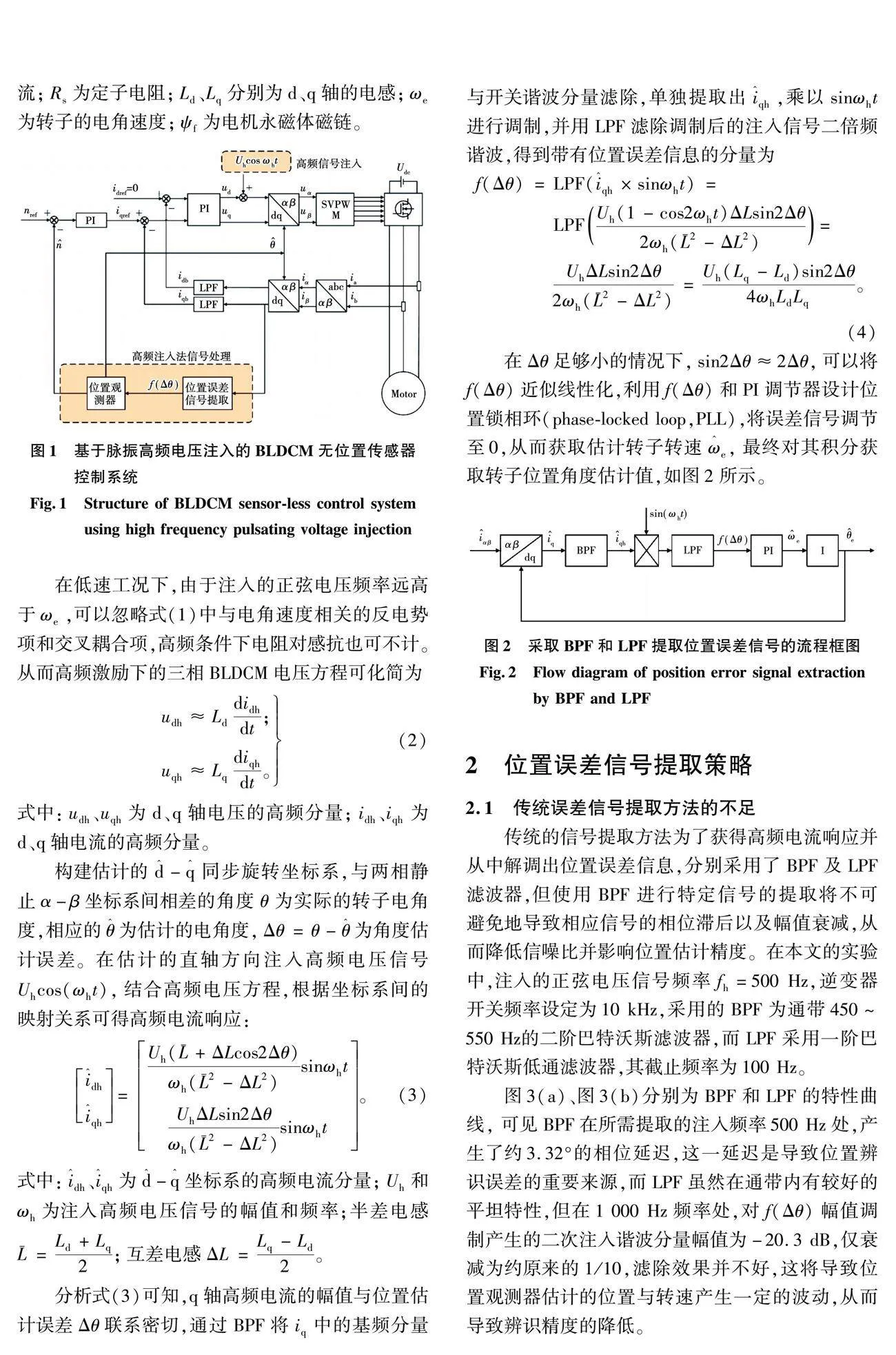
为了对比两种方法的性能,对各自的位置观测闭环传递函数进行仿真绘制幅频特性曲线。对于位置观测等效环路中的PI调节器,增大比例系数KP有助于提高系统带宽,而积分系数Ki则主要与闭环谐振峰值有关,对带宽无影响,因此给出Ki为定值,比例系数KP分别为30、60、120时采取BPF结合LPF方法的幅频特性曲线,SOGI结合SFNF方法的比例系数则取120,如图8所示。设置LPF的截至频率为100 Hz,SFNF的陷波因子为0.1。为了方便进行比较,以幅值增益-60 dB为谐波滤除性能评判参考,即将谐波分量降低至0.1%。从图中可以看到,随着KP的提高,BPF+LPF策略的带宽增大,但滤波精度下降,在满足滤波性能的前提下,带宽被限制在30 Hz以内。在比例系数同为120时,传统误差信号提取策略的带宽来到约104 Hz,但谐波幅值衰减下降到-42 dB,而SOGI+SFNF策略在带宽扩展至78 Hz的同时,1 kHz谐波分量幅值增益绝对值始终为0,可以兼顾滤波精度与动态性能。
3 实验分析
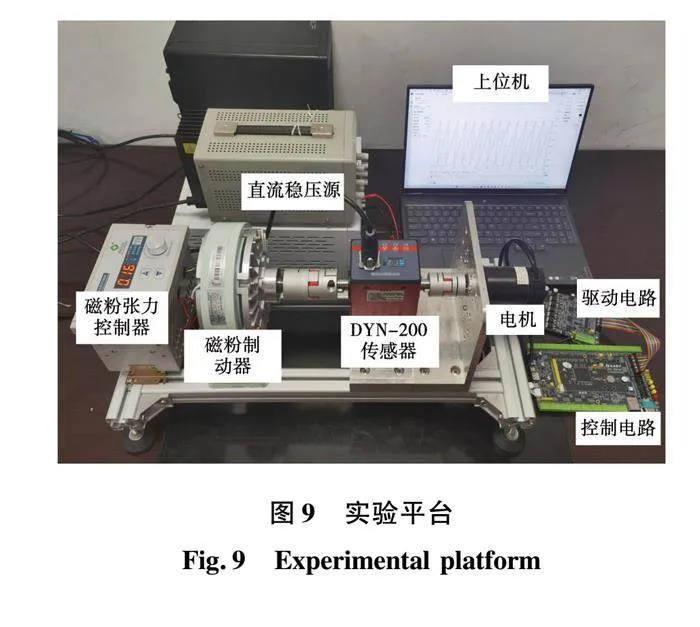
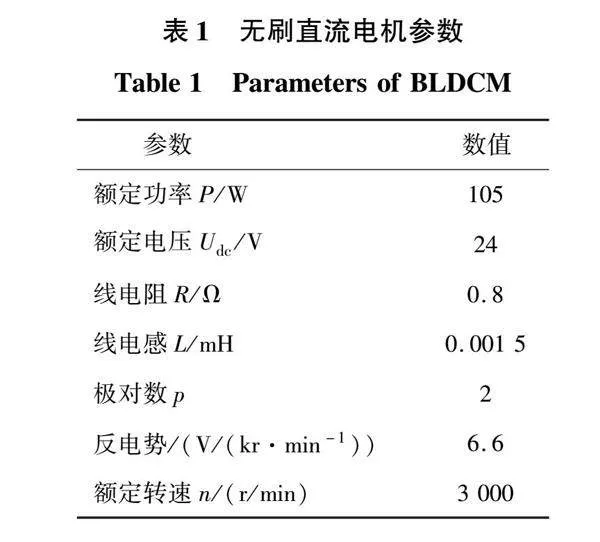
为了验证本文所提SOGI级联SFNF策略的有效性,以stm32F407IGT6为主控单元,构造用于实现BLDCM无位置传感器控制的试验平台,如图9所示。该平台主要包括表贴式BLDCM,其参数见表1。加载用磁粉制动器及其数显控制器KTC800A,以及两者间传动轴上搭载的DYN-200电机动态转速及功率传感器,用于实时测量转子传动轴的转速和电机功率,通过电机内置的霍尔式位置传感器和DYN-200传感器分别获取电机转子的实际位置和转速信息,用于和高频注入估计结果进行比较。试验过程中产生的数据由单片机控制器通过串口通信实时发送至上位机进行显示并保存,在停机后导出分析。
实验中,通过stm32高级定时器设置逆变器的开关频率为10 kHz,死区时间为2 μs,由高级定时器触发ADC采样中断服务程序,在每个PWM周期完成一次电流采样、电流环计算和PWM占空比更新,转速环更新频率1 kHz,在Systick中断服务程序里完成。母线电压24 V,注入的脉振高频电压信号频率为500 Hz,幅值为4 V。SOGI阻尼系数取0.7,SFNF陷波因子0.5,用于进行比较的传统误差信号提取方法中的BPF和LPF参数与2.1节中相同。
3.1 转速阶跃性能验证
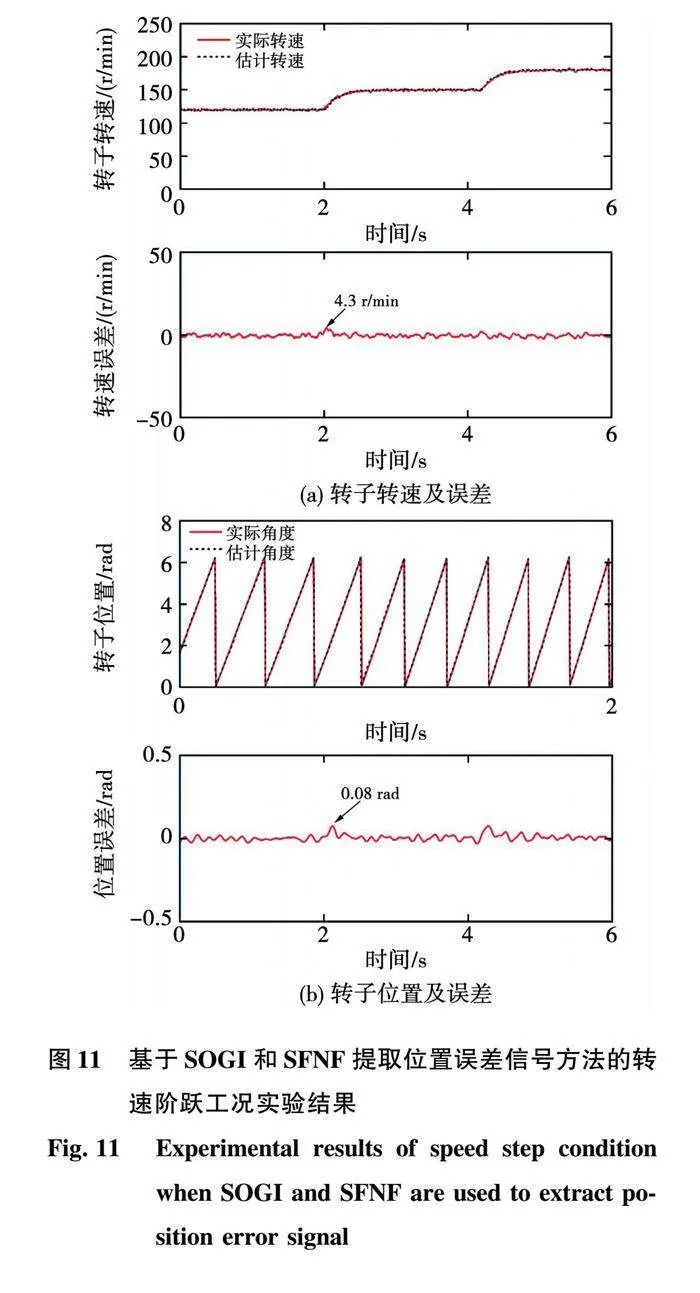
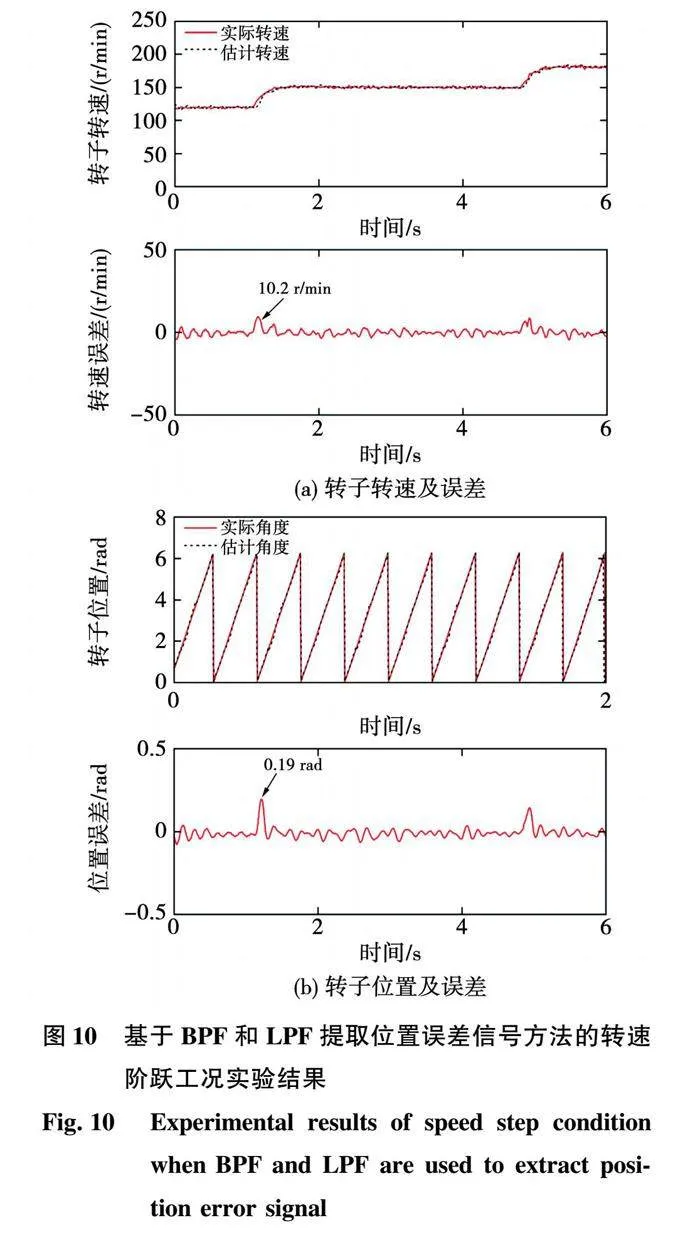
为了验证本文所提策略的转速和位置估计效果,分别进行传统脉振高频注入法和本文所提方法在给定电机转速120 r/min时,进行两次加速至180 r/min的实验,结果如图10和图11所示(FOC的转速环以转子机械转速为参考转速,图中的转子位置及误差为电角度,下同)。其中转子转速及转速误差如图10(a)所示,转子角度及其误差见图10(b)。可以看到由于BPF加LPF的误差信号提取策略存在滤波器相位延迟和带宽不足的问题,估计转速的变化显然相比实际转速有落后,跟踪效果并不理想。对转速从120 r/min阶跃到150 r/min这一段的曲线进行分析,突变时的转速偏差约升高至10.2 r/min,估计位置同样有约0.19 rad的偏离;而在同样的转速阶跃条件下,本文所提方法消除了BPF的相位延迟,并扩展了位置观测环的带宽,在转速突变过程中误差减少至约4.3 r/min,转子位置误差减少至0.08 rad。说明改进后的SOGI级联SFNF误差信号提取策略在电机变速过程中跟踪性能更好,且在两次阶跃之间,电机稳定运行时转速曲线更趋于平稳,稳态时转子的平均转速误差也低于采取BPF和LPF时的平均转速误差。
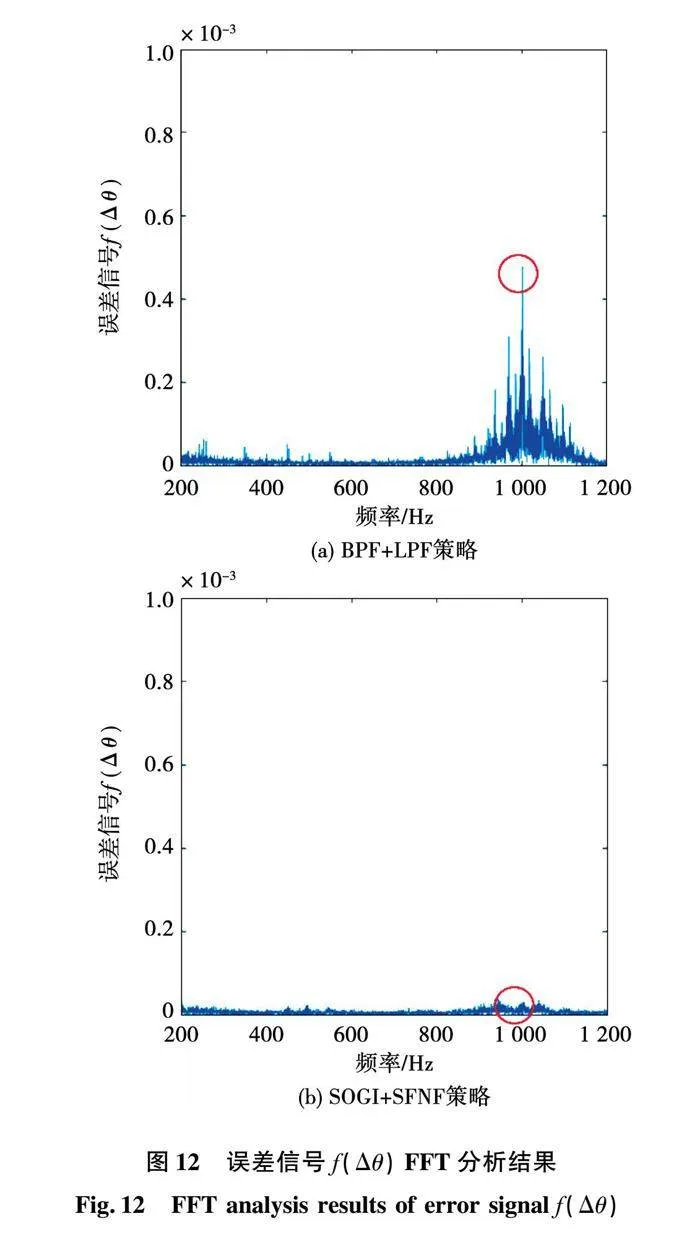
为了对比两种策略的滤波精度,分别取转子转速稳定时交轴电流经过两种误差信号提取环节输出的f(Δθ)进行频域上的观察。图12(a)、图12(b)分别为两种误差信号提取策略相对应的FFT分析结果,本文实验注入的电压频率为500 Hz,因此重点关注1 000 Hz的二次谐波信号,从图中可见采取SOGI+SFNF策略后,谐波信号幅值相比采取BPF+LPF策略降低约94%,说明本文所提策略的滤波性能更加优越。
3.2 突加负载抗扰动性能验证
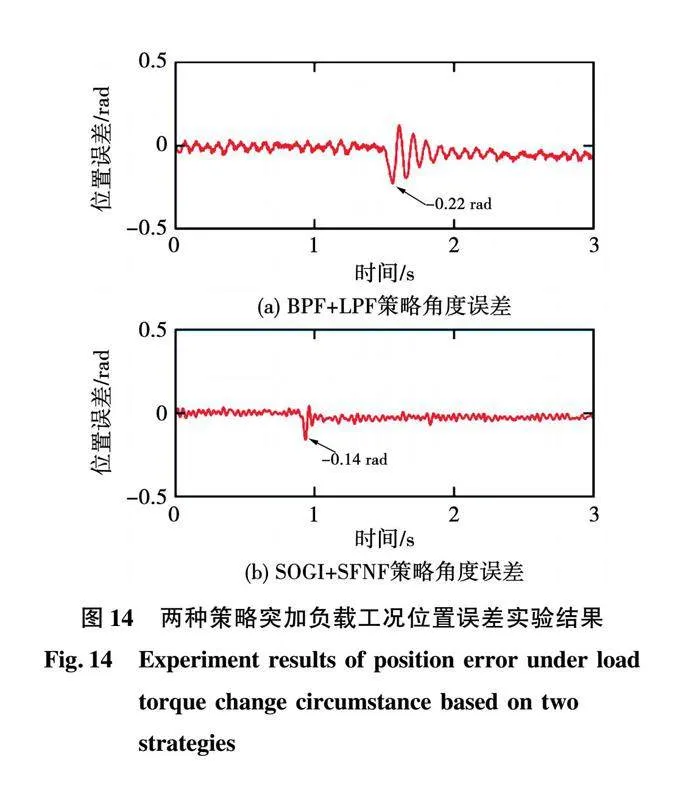
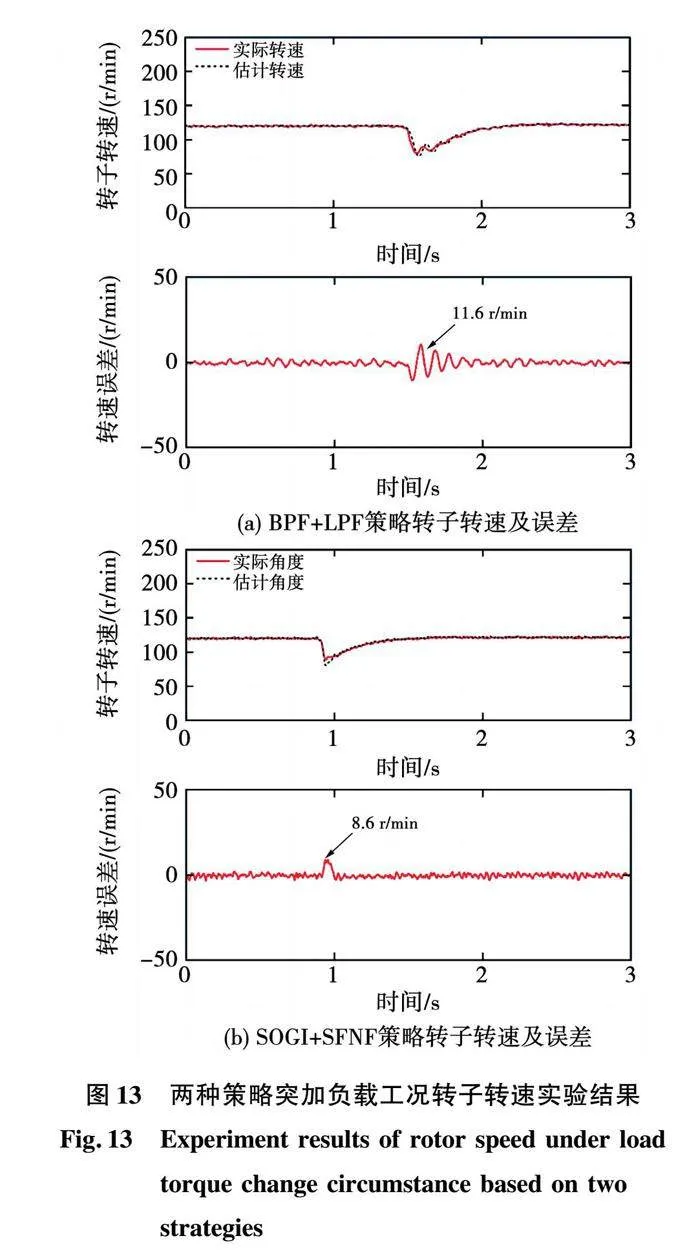
为了验证本文所提策略的抗扰动性能,在电机以120 r/min的转速运行时,通过磁粉制动器突然施加大小为电机额定转矩50%的负载,分别使用传统脉振高频注入法和本文所提方法得到的实验结果如图13和图14所示。从图中可以看出,在负载转矩突变时,采用传统方法的电机转速跌至约79 r/min,且估计转速和位置均产生较明显的偏差和波动,由于位置观测环中辨识得到的转子位置由估计转速积分而来,位置误差曲线以同样方式振荡,两者波动调节时间基本一致,约为600 ms,这一过程中最大转速误差和位置误差分别为11.6 r/min和0.22 rad,当位置偏差过大时电机将有失步乃至停转的风险。而使用本文所提方法,电机转速跌幅削弱,最低约90 r/min,转速波动情况明显改善且误差调节时间缩短至约350 ms,最大转速误差降低至约8.6 r/min,最大位置误差约0.14 rad。
综上所述,相较传统高频注入中用BPF加LPF提取位置误差信号的方法,采用本文所提的SOGI加SFNF方法后,脉振高频电压注入法的位置和转速估计精度均有所提高,动态性能和抗扰动能力得到改善。
4 结 论
基于凸极性跟踪的高频注入法对于研究无刷直流电机低速无传感器控制具有重要意义,为了改善传统脉振高频电压注入法采用带通滤波器和低通滤波器进行信号提取和解调带来的位置估计精度不高、动态性能难以兼顾、参数整定困难等问题,本文分析了传统误差信号提取方法的缺陷,并创新了一种级联二阶广义积分器和单频陷波器提取位置误差信号的改进方法,充分利用二阶广义积分器的选频特性代替带通滤波器,有效避免了滤波器相位滞后效应,并利用单频陷波器的陷波特性滤除高频注入谐波分量。实验结果表明,在转速阶跃和突加负载等工况下,本文所提改进方法的响应速度和位置估计精度相比传统方法均有提高,并具有良好的动态性能,同时参数整定简单,对于提升脉振高频电压注入法的可靠性有一定价值。在本文研究的基础上,将进一步通过改进自适应中心频率的SOGI提高动态条件下脉振高频电压注入法的估计精度,并结合基于反电动势的观测器拓展该方法的应用范围。
参 考 文 献:
[1] DE Viaene J, CEULEMANS D, DERAMMELA-ERE S,et al. Sensorless load angle control for energy optimal sinusoidal driven BLDC motor applications[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(4):2290.
[2] DU B, WU S, HAN S,et al. Application of linear active disturbance rejection controller for sensorless control of internal permanent-magnet synchronous motor[J]. IEEE Transactions on Industrial Electronics, 2016, 63(5):3019.
[3] SASHIDHAR S, GURU PRASAD REDDY V, FERNANDES B G. A single-stage sensorless control of a PV-based bore-well submersible BLDC motor[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2019, 7(2):1173.
[4] 甘志伟,王云冲,缪冬敏,等.宽转速范围永磁同步发电机电流矢量控制[J].电机与控制学报, 2020, 24(1):1.
GAN Zhiwei, WANG Yunchong, MIAO Dongmin, et al. Current vector control of permanent magnet synchronous generator for wide speed-range operation[J]. Electric Machines and Control, 2020, 24(1):1.
[5] 宋吉来,曲道奎,徐方,等.机器人无力传感器主动柔顺控制研究[J].电机与控制学报, 2020, 24(8):159.
SONG Jilai, QU Daokui, XU Fang, et al. Active compliance control research for robots without force sensor[J]. Electric Machines and Control,2020,24(8):159.
[6] PARK J S, LEE K D, LEE S G, et al. Unbalanced ZCP compensation method for position sensorless BLDC motor[J]. IEEE Transactions on Power Electronics, 2019, 34(4): 3020.
[7] 刘兵,周波.脉振高频电压注入SPMSM无位置传感器控制的估计误差分析与抑制方法[J].中国电机工程学报, 2018, 38(14):4232.
LIU Bing, ZHOU Bo. Analysis and compensation of position estimation error in SPMSM sensorless control based on high frequency pulsating voltage injection[J]. Proceedings of the CSEE, 2018, 38(14): 4232.
[8] WANG G, VALLA M, SOLSONA J. Position sensorless permanent magnet synchronous machine drives—a review[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7):5830.
[9] ZHANG Z, KONG L, WU Y, et al. PMSM sensorless control based on adaptive luenberger observer[C]//2022 37th Youth Academic Annual Conference of Chinese Association of Automation (YAC), November 19-20, 2022, Beijing, China. 2022: 398-403.
[10] LI Z, ZHOU S, XIAO Y, et al. Sensorless vector control of permanent magnet synchronous linear motor based on self-adaptive super-twisting sliding mode controller[J]. IEEE Access, 2019, 7:44998.
[11] 张荣芸,方星晖,时培成,等. 基于改进PSO优化的IPMSM全速域无传感器控制[J]. 电机与控制学报, 2022, 26(9): 130.
ZHANG Rongyun, FANG Xinghui, SHI Peicheng, et al. IPMSM full speed sensorless control based on improved PSO Optimization[J]. Electric Machines and Control, 2022, 26(9): 130.
[12] BADINI S S, VERMA V.A novel MRAS based speed sensorless vector controlled PMSM drive[C]//2019 54th International Universities Power Engineering Conference (UPEC), September 3-6, 2019, Bucharest, Romania. 2019:1.
[13] 李洪凤,徐浩博,徐越. 扩展卡尔曼滤波参数辨识下永磁同步电机模型预测转矩控制[J]. 电机与控制学报, 2023, 27(9):19.
LI Hongfeng, XU Haobo, XU Yue. PMSM model prediction of torque control based on extended Kalman filter parameter identification [J]. Electric Machines and Control, 2023, 27(9):19.
[14] CAO R, JIANG N, LU M. Sensorless control of linear flux-switching permanent magnet motor based on extended Kalmanfilter[J]. IEEE Transactions on Industrial Electronics, 2020, 67(7):5971.
[15] WEI J, XU H, ZHOU B, et al. An integrated method for three-phase AC excitation and high-frequency voltage signal injection for sensorless starting of aircraft starter/generator[J]. IEEE Transactions on Industrial Electronics, 2019, 66(7):5611.
[16] ALMARHOON A H, ZHU Z Q, XU P. Improved rotor position estimation accuracy by rotating carrier signal injection utilizing zero-sequence carrier voltage for dual three-phase PMSM[J]. IEEE Transactions on Industrial Electronics, 2017, 64(6):4454.
[17] KIM S I, IM J H, SONG E Y, et al. A new rotor position estimation method of IPMSM using all-pass filter on high-frequency rotating voltage signal injection[J]. IEEE Transactions on Industrial Electronics, 2016, 63(10):6499.
[18] 孙明阳,和阳,邱先群,等. 随机频率三角波注入永磁同步电机无位置传感器降噪控制[J]. 电工技术学报, 2023, 38 (6): 1460.
SUN Mingyang, HE Yang, QIU Xianqun, et al. Random frequency triangular wave injection Permanent magnet synchronous motor sensorless noise reduction control[J]. Transactions of China Electrotechnical Society, 2023, 38 (6): 1460.
[19] ZHANG X, LI H, YANG S, et al. Improved initial rotor position estimation for PMSM drives based on HF pulsating voltage signal injection[J]. IEEE Transactions on Industrial Electronics, 2018, 65(6):4702.
[20] LUO X, TANG Q, SHEN A,et al. PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixed-frequency rotating reference frame[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4):2294.
[21] 赵文祥,刘桓,陶涛, 等. 基于虚拟信号和高频脉振信号注入的无位置传感器内置式永磁同步电机MTPA控制[J]. 电工技术学报, 2021, 36(24): 5092.
ZHAO Wenxiang, LIU Huan, TAO Tao, et al. MTPA control of sensorless built-in permanent magnet synchronous motor based on virtual signal and high frequency pulse signal injection[J]. Transactions of China Electrotechnical Society,2021,36(24):5092.
[22] LU Q, WANG Y, MO L, et al. Pulsating high frequency voltage injection strategy for sensorless permanent magnet synchronous motor drives[J]. IEEE Transactions on Applied Superconductivity, 2021, 31(8):1.
[23] 刘计龙,付康壮,麦志勤,等.基于双频陷波器的改进型高频脉振电压注入无位置传感器控制策略[J].中国电机工程学报,2021,41(2):749.
LIU Jilong, FU Kangzhuang, MAI Zhiqin, et al. Sensorless control strategy of improved HF pulsating voltage injection based on dual frequency notch filter[J]. Proceedings of the CSEE, 2021, 41(2):749.
[24] LI Haoyuan, ZHANG Xing, YANG Shuying, et al. Improved initial rotor position estimation of IPMSM using amplitude demodulation method based on HF carrier signal injection[C]//Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society, December 18, 2017, Beijing, China. 2017:1996-2001.
[25] YANG S C, YANG Shengming, HU Jinghui. Design consideration on the square-wave voltage injection for sensorless drive of interior permanent-magnet m-achines[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1):159.
(编辑:刘素菊)
