积分型非奇异终端滑模PMSM无传感器控制系统
2024-05-30郑诗程刘志鹏赵卫王宇郎佳红


摘 要:
针对永磁同步电机中高速情况下传统的滑模观测器估算精度低且存在较强抖振的问题,提出一种基于改进型滑模观测器的PMSM矢量控制方法。基于非线性滑模面理论分析,构建一种积分型非奇异终端滑模面,有效降低了抖振现象,提高了系统的观测精确度;并设计了一种自适应反电动势滤波器,使反电动势能随观测器自适应调节,且谐波含量低,进一步提升动态精度;最后,利用正交锁相环原理调制出电机转子位置信息,将提出的新型控制方法应用到永磁同步电机调速系统,与传统滑模控制进行对比。仿真和实验表明,提出的基于新型滑模观测器的永磁同步电机控制系统跟踪精度高、鲁棒性强,动、静态响应好。
关键词:反电动势滤波器;永磁同步电机;无传感器控制;滑模观测器;调速系统
DOI:10.15938/j.emc.2024.03.017
中图分类号:TM341;TP273
文献标志码:A
文章编号:1007-449X(2024)03-0169-10
收稿日期: 2022-11-23
基金项目:安徽省重点研发计划(202104a05020022)
作者简介:郑诗程(1972—),男,博士,教授,研究方向为电力电子与电机驱动控制技术、新能源发电技术等;
刘志鹏(1996—),男,硕士研究生,研究方向为电力电子与电机驱动控制技术;
赵 卫(1997—),男,硕士研究生,研究方向为电力电子与电机驱动控制技术;
王 宇(1997—),男,硕士研究生,研究方向为电力电子与电力传动;
郎佳红(1972—),男,博士,副教授,研究方向为新能源技术开发、电能质量管理等。
通信作者:郑诗程
Integral non-singular terminal sliding mode PMSM sensorless control system
ZHENG Shicheng, LIU Zhipeng, ZHAO Wei, WANG Yu, LANG Jiahong
(School of Electronic Information and Engineering, Anhui University of Technology, Maanshan 243000, China)
Abstract:
In order to solve the problem of low estimation accuracy and strong chattering of the traditional sliding mode observer at medium and high speeds of permanent magnet synchronous motors, a vector control method of PMSM based on an improved sliding mode observer was proposed. Based on the theoretical analysis of the nonlinear sliding mode surface, in the method an integral non-singular terminal sliding mode surface was constructed, which effectively reduces chattering phenomenon and improves the observation accuracy of the system. An adaptive back electromotive force filter was designed to make the back electromotive force adjust adaptively with the observer, and its harmonic content is low, which further improves the dynamic accuracy. Finally, the rotor position information of the motor was modulated using the principle of quadrature phase-locked loop, and the proposed novel control method was applied to the speed control system of the permanent magnet synchronous motor to compare it with the traditional sliding mode control. Simulations and experiments show that the proposed permanent magnet synchronous motor control system based on a new sliding mode observer has high tracking accuracy, strong robustness, fast convergence speed and good dynamic and static responses.
Keywords:back EMF filter; permanent magnet synchronous motor(PMSM); sensorless control; sliding mode observer; speed control system
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有功率密度大、电磁转矩脉动小等突出优势,因而被广泛应用于电机控制领域。近年来,有关于PMSM无传感器控制系统的研究有了实质性的进展,国内外众多学者提出了许多不同的控制方法。目前常用的控制算法主要有:滑模观测器法、磁链积分估算法、高频信号注入法、线性观测法等。文献[1-3]主要对模型参考自适应法进行了研究,此方法结构简单易分析,利于数学推导,但对参数波动敏感。文献[4-6]采用了卡尔曼滤波器法,在PMSM调速系统中对扰动负载具有强的鲁棒性,但引入了大量矩阵,求解过程计算量较大。文献[7-9]对处于零低速域内的调速系统中引入了高频信号注入法,该方法仅适用于具有凸极效应的PMSM控制系统中,在隐极式电机中无法使用此控制策略,具有一定的局限性。
根据滑模控制理论方面的研究可知[10-12],滑模观测器(sliding mode observer,SMO)不依赖电机模型精度,且其计算简单,系统内部参数波动对其影响小,且对系统外部具有较强的抗干扰性,被广泛应用于PMSM控制系统[13-20]。文献[21-23]改进了奇异观测器算法,建立一种积分型非奇异终端滑模观测器(non-sigular terminal sliding mode observer,NTSMO),有效避免了微分函数所带来的噪声,但系统中存在高频切换信号,仍会产生较大的抖振,鲁棒性和稳定性能较低。
在上述控制策略基础上,本文提出一种新型非奇异快速终端滑模面(non-sigular fast terminal sliding mode,NFTSM)算法,有效抑制抖振,并在后级输出侧设计相应的自适应反电动势滤波器(adaptive back electromotive force filter,adaptive back-EMF),实现系统自适应调节,同时消除了相位滞后的问题,得到的反电动势观测值更为平滑。最后,根据正交锁相环(phase-locked loop,PLL)理论,预测出电机转子位置与转速信息。针对所设计新型SMO数学模型构造相应的Lyapunov函数,利用稳定判据理论以此证明此系统的稳定性。仿真与实验结果表明,本文所提出的积分型NFTSMO具有跟踪精度高、鲁棒性强等特点。
4 仿真分析与实验验证
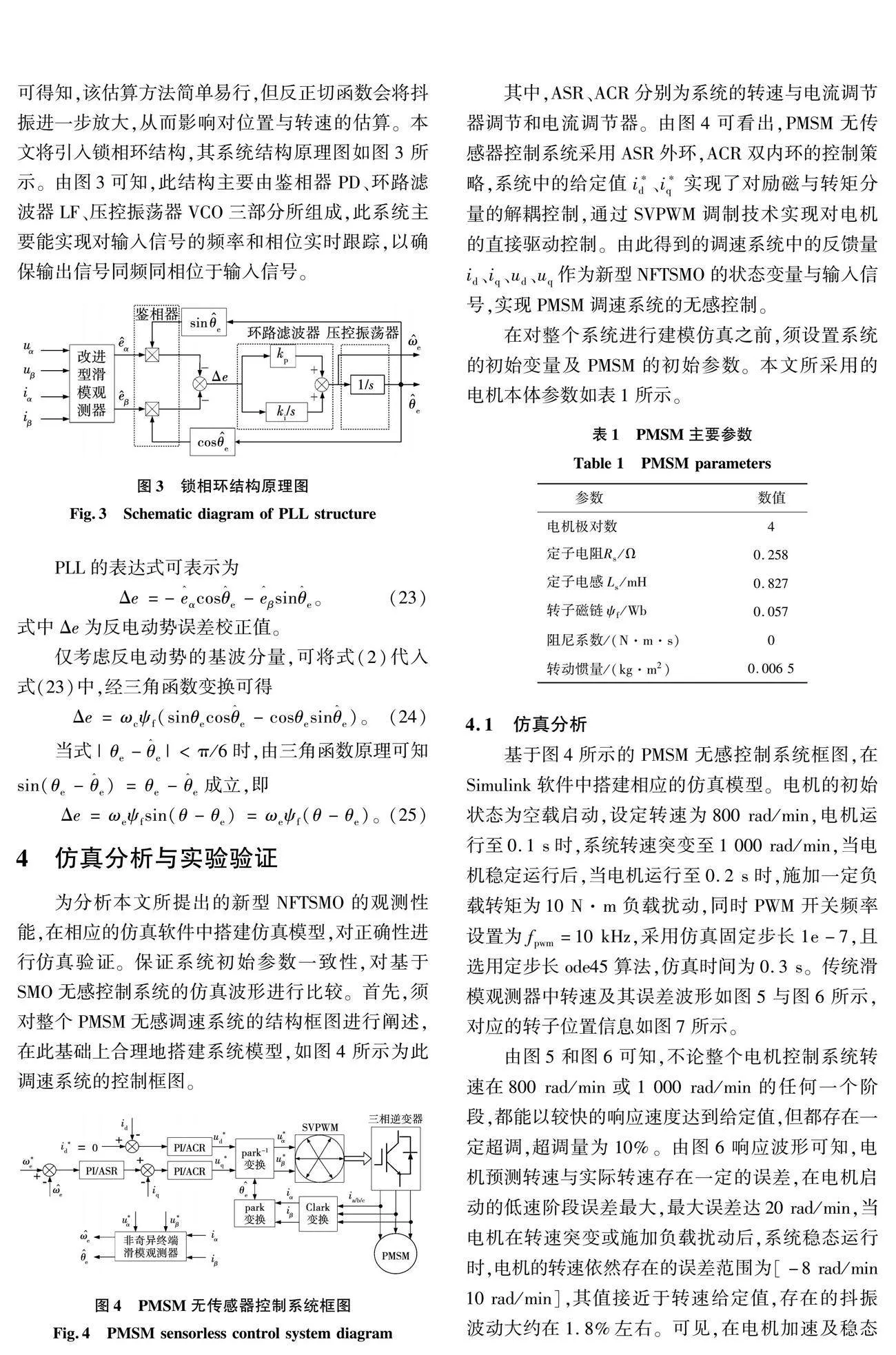
为分析本文所提出的新型NFTSMO的观测性能,在相应的仿真软件中搭建仿真模型,对正确性进行仿真验证。保证系统初始参数一致性,对基于SMO无感控制系统的仿真波形进行比较。首先,须对整个PMSM无感调速系统的结构框图进行阐述,在此基础上合理地搭建系统模型,如图4所示为此调速系统的控制框图。
其中,ASR、ACR分别为系统的转速与电流调节器调节和电流调节器。由图4可看出,PMSM无传感器控制系统采用ASR外环,ACR双内环的控制策略,系统中的给定值i*d、i*q实现了对励磁与转矩分量的解耦控制,通过SVPWM调制技术实现对电机的直接驱动控制。由此得到的调速系统中的反馈量id、iq、ud、uq作为新型NFTSMO的状态变量与输入信号,实现PMSM调速系统的无感控制。
在对整个系统进行建模仿真之前,须设置系统的初始变量及PMSM的初始参数。本文所采用的电机本体参数如表1所示。
4.1 仿真分析
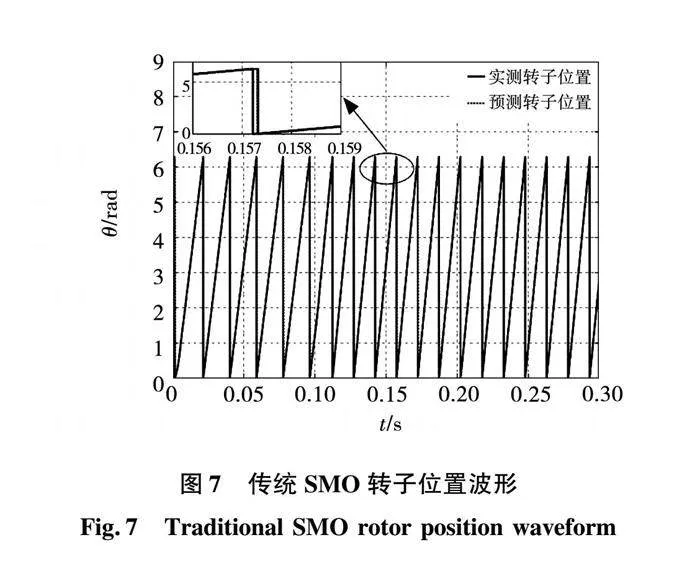
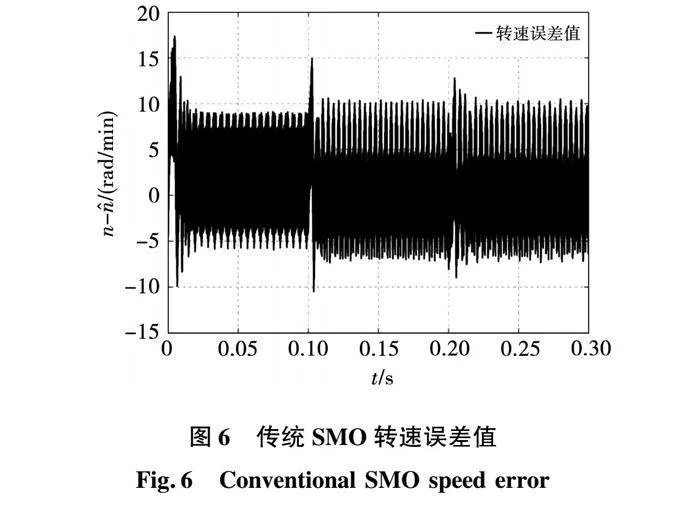
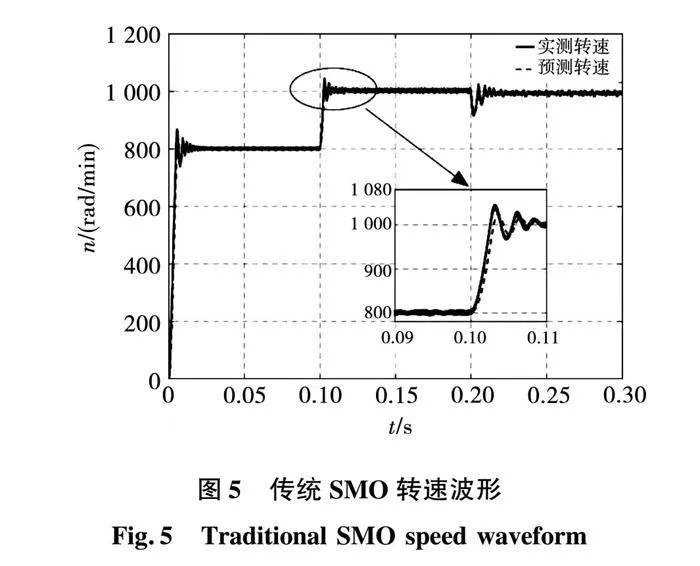
基于图4所示的PMSM无感控制系统框图,在Simulink软件中搭建相应的仿真模型。电机的初始状态为空载启动,设定转速为800 rad/min,电机运行至0.1 s时,系统转速突变至1 000 rad/min,当电机稳定运行后,当电机运行至0.2 s时,施加一定负载转矩为10 N·m负载扰动,同时PWM开关频率设置为fpwm=10 kHz,采用仿真固定步长1e-7,且选用定步长ode45算法,仿真时间为0.3 s。传统滑模观测器中转速及其误差波形如图5与图6所示,对应的转子位置信息如图7所示。
由图5和图6可知,不论整个电机控制系统转速在800 rad/min或1 000 rad/min的任何一个阶段,都能以较快的响应速度达到给定值,但都存在一定超调,超调量为10%。由图6响应波形可知,电机预测转速与实际转速存在一定的误差,在电机启动的低速阶段误差最大,最大误差达20 rad/min,当电机在转速突变或施加负载扰动后,系统稳态运行时,电机的转速依然存在的误差范围为[-8 rad/min" 10 rad/min],其值接近于转速给定值,存在的抖振波动大约在1.8%左右。可见,在电机加速及稳态运行状态下,系统的动、静态性能较差。
分析图7可知,电机启动处于低速域阶段,此算法不能准确估算转子实际位置。在中高速阶段,观测精度增强,但由于传统SMO采用低通滤波器滤除等效反电动势中的高频分量,会造成一定的相位滞后,与实际转子位置滞后角度0.065 rad,在电机稳态运行阶段,位置的相位误差为0.05 rad。
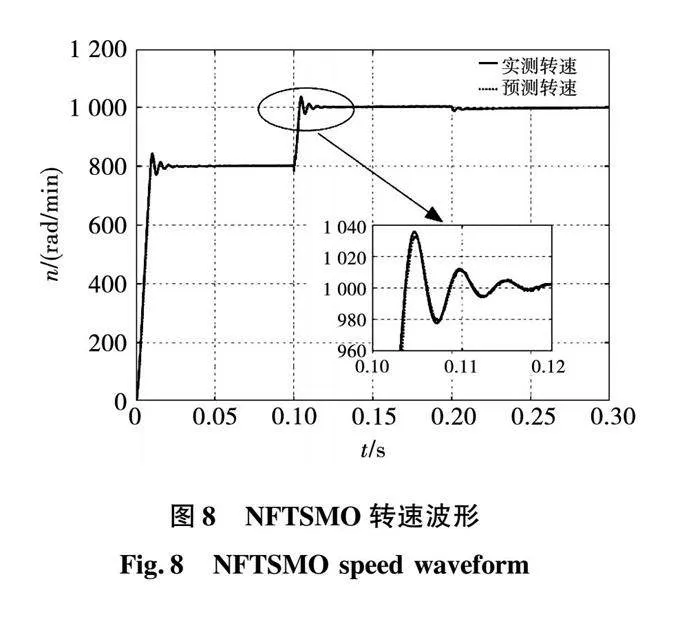
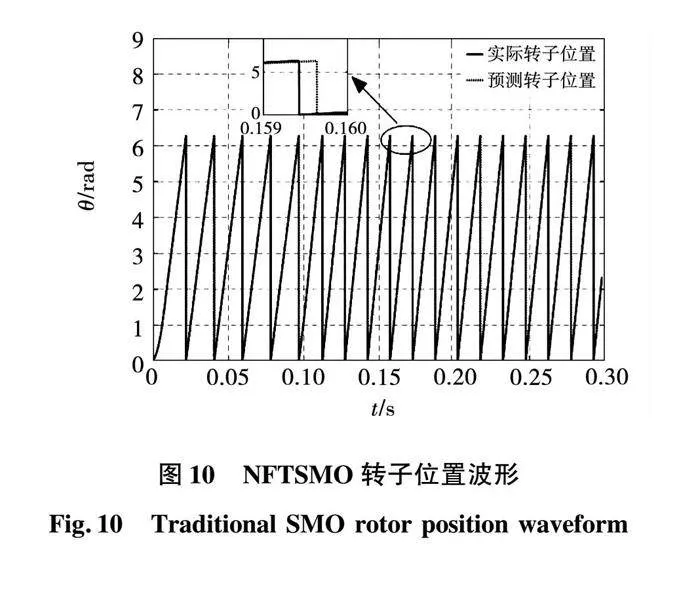
在相同的假设与初始条件下,采用NFTSMO的电机转速和误差仿真响应曲线结果如图8和图9所示。
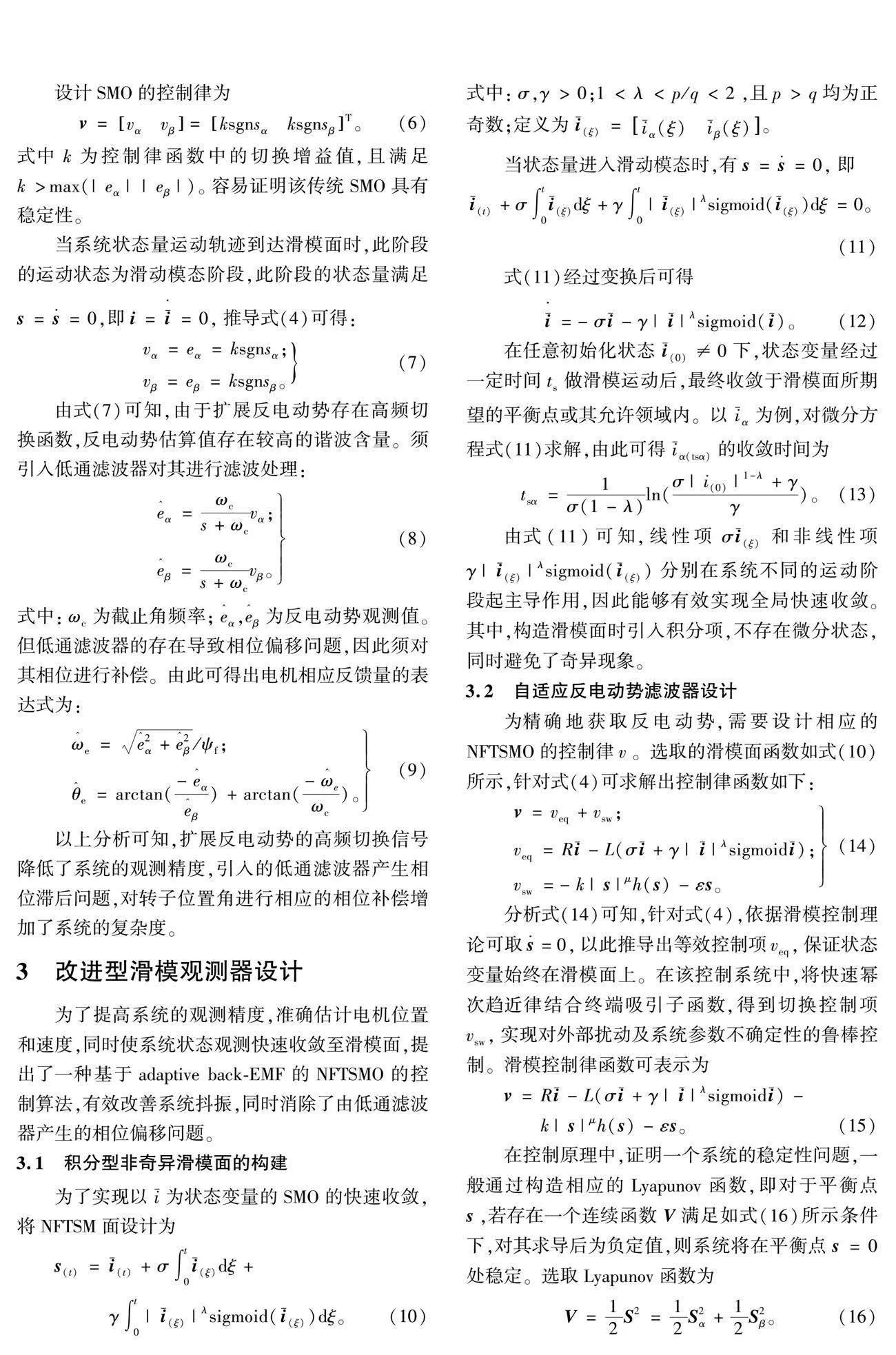
由图8、图9可知,观测的转速在0.002 5 s达到系统设定的1 000 rad/min转速,能够以较快的速度达到给定值;在对电机突变转速和施加负载扰动时,转速的误差值较小维持在±0.5 rad/min,系统抗干扰能力强,估算精度高。对比SMO的转速误差存在明显的抖振,本文设计的NFTSMO对抖振有明显的抑制,整个控制系统有较强的鲁棒性。图10为机械传感器实测和预测的电机转子位置信息。
根据图10可知,电机的转子位置估算由于不存在低通滤波器的相位滞后的现象,电机在动态响应过程中,转子位置误差达到最大为0.052 rad,在系统进入稳态运行时,能够快速、准确地跟踪实际转子位置,估算精度得到了明显的改善。
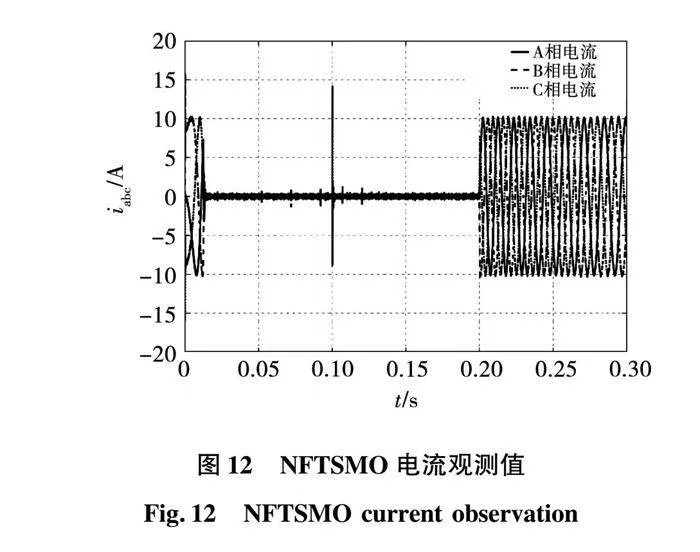
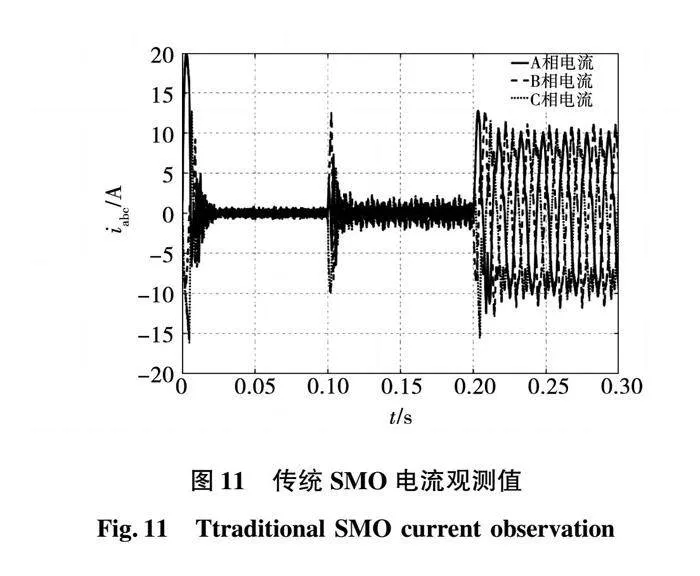
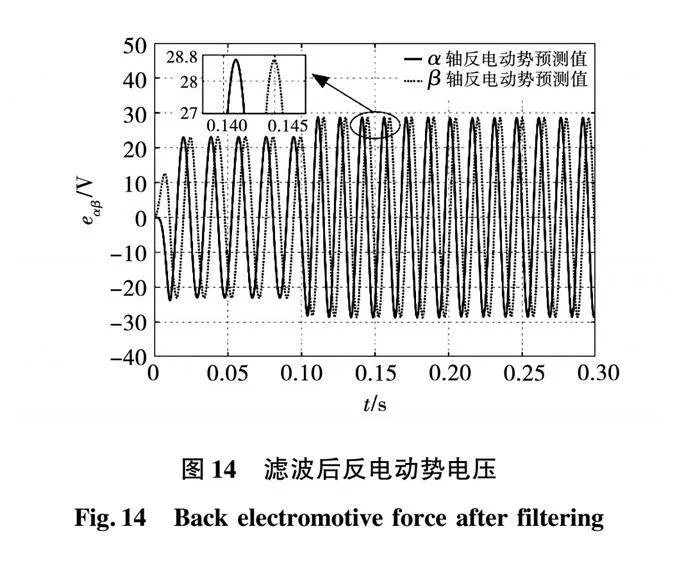
根据图11和图12可知,不论电机空载启动后突加转速还是在0.2 s给系统施加10 N·m的扰动负载,较传统的SMO而言,新型NFTSMO的观测效果更好,抖振有明显的改善。仿真结果表明此新型NFTSMO能在全局范围内提高观测器的估算精度,施加外部扰动后动态性能的鲁棒性也有所提升。在新型NFTSMO控制系统中针对扩展反电动势进行二次滤波所设计的adaptive back-EMF得到滤波前后的仿真波形如图13和图14所示。
对比图13和图14,采用自适应反电动势滤波器,较未引入adaptive back-EMF常规NTFSMO中,谐波含量较少,使NFTSMO得到光滑的反电动势电压估算值,提高了系统的估算精度,同时消除了相位偏移,能够快速、准确地跟踪系统的给定值。
4.2 实验验证
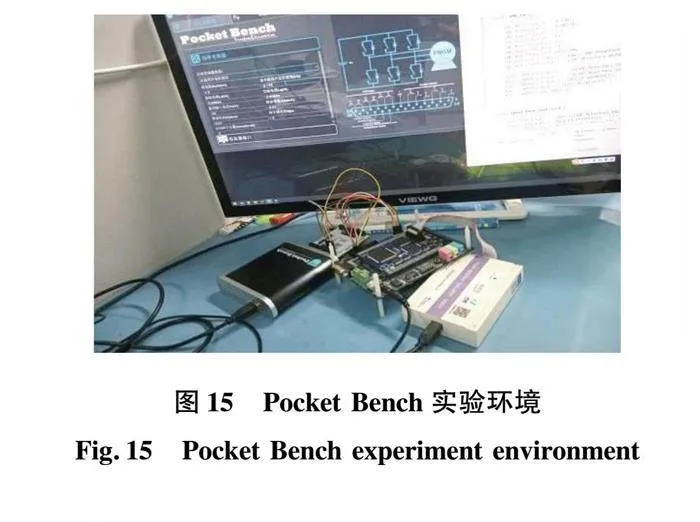
为了验证上述理论与仿真的正确性,本文采用了一款超紧凑功率变换器硬件在环实时仿真器PocketBench。在该半虚拟实验平台上,可验证控制电路与算法的有效性。搭建的实验平台如图15所示。
从图15可以看出,此实验是在半实物模拟实验平台中完成相应控制算法可行性的验证。此实验仅由DSP28335控制板与PocketBench模拟功率变换器构成,并不涉及到整个实验电机、驱动电路、采样电路的实物模型。在此基础上的实验结果波形如图16~图19所示。
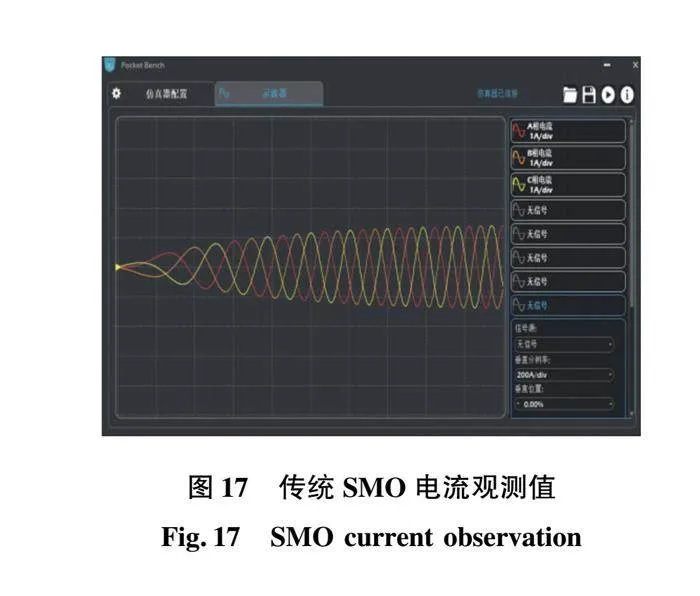
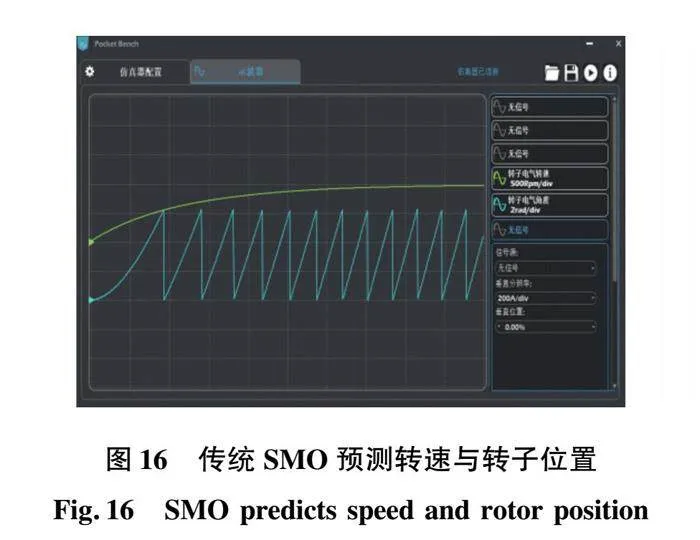
设定电机给定值为1 000 rad/min,图16和图17为传统SMO下的电机转速和转子位置以及电流响应波形。由图中分析可知,电机在经过一定时间后能够达到给定值并保持稳定,相应的三相电流在如图17所示,在电机启动响应阶段,电流存在一定时间的不稳定状态,不能很好地预测出电流模型,当转速达到稳定状态时,由于传统SMO存在较大抖振问题,导致电流的谐波较大。
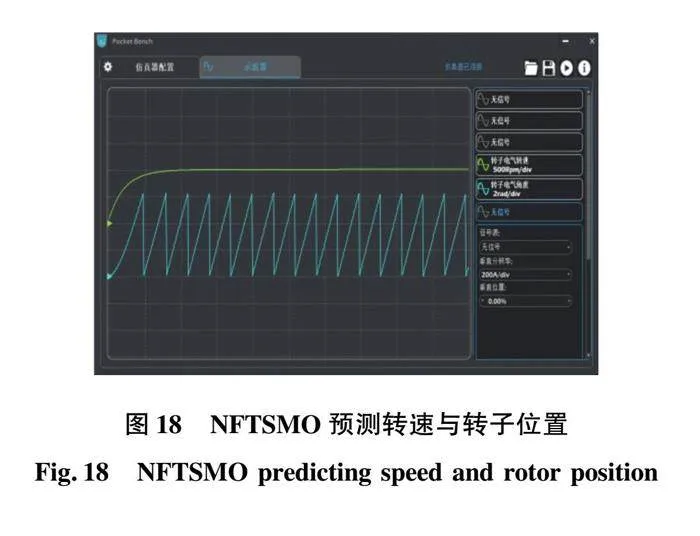
在上述相同的实验条件下,将本文设计的新型滑模观测器控制算法应用于此系统中,在CCS6软件环境下所编写的滑模观测器程序并对相应的半虚拟实验平台进行调试,得到的转子位置与转速信息相应曲线如图18所示。
由图18和图19可知,在相同的初始参数设定条件下,仅改变控制算法,与图16比较可知,电机能够以较快的速度达到给定值,转子位置也不存在相位滞后的问题,相应的电流波形在稳定后由于加入了自适应反电动势滤波器,得到更为光滑的反电动势,电流存在的谐波含量较小。
从半实物模拟实验的波形图中可看出,电机转子电气转速为500 rad/min/div,在转速波形稳定的情况下纵坐标占据2 div,此条件下电机的转速为1 000 rad/min。同理,转子电气角度为2 rad/div,三相电流纵坐标数值为1 A/div。
5 结 论
针对传统SMO控制系统中存在抖振与相位偏移等问题,本文设计了一种积分型滑模面,结合终端吸引子概念构造出相应的滑模控制律函数。通过仿真与实验,基本验证了基于此控制策略的PMSM调速系统的可行性。
较常规的滑模观测器,本文所提出的积分型NFTSMO能实现对系统固有抖振的削弱,且有效避免了低通滤波器的使用,无需对系统中存在的相位偏移问题进行补偿,简化系统结构。
在NFTSMO控制系统中采用控制律,其中引入的积分项能够有效减小反电动势预测值的谐波含量,同时加快了状态变量的收敛速度,且系统具有了全局鲁棒性。
本文所设计的adaptive back-EMF对反电动势进行二次滤波处理,实现了对扩展反电动势自适应调节,由此可得到更为平滑的反电动势预测值,提升了电机转速和转子位置的跟踪精度。
参 考 文 献:
[1] 柳志飞,杜贵平,杜发达.有限集模型预测控制在电力电子系统中的研究现状和发展趋势[J].电工技术学报,2017,32(22):58.
LIU Zhifei, DU Guiping, DU Fada. Research status and development trend of finite control set model predictive control in power electronics[J]. Transactions of China Electrotechnical Society, 2017,32(22):58.
[2] 潘峰,秦国锋,王淳标,等.电动汽车用永磁同步电机模型预测MRAS无速度传感器控制[J].电机与控制应用,2019, 46(10): 104.
PAN Feng, QIN Guofeng, WANG Chunbiao, et al. Model prediction of MRAS speed sensorless control of PMSM for electric vehicles[J]. Electric Machinesamp;Control Application, 2019, 46(10): 104.
[3] PIIPPO A, LUOMI J. Adaptive observer combined with HF signal injection for sensorless control of PMSM drives[C]//2005 IEEE International Conference on Electric Machines and Drives, May 15, 2005, San Antonio, TX, USA. 2005: 674-681.
[4] 钟臻峰,金孟加,沈建新.基于分段PI调节器的模型参考自适应永磁同步电动机全转速范围无传感器控制[J].中国电机工程学报,2018,38(4): 1203.
ZHONG Zhenfeng, JIN Mengjia, SHEN Jianxin. The model based on the segmented PI regulator refers to the sensorless control of the full speed range of the adaptive PMSM[J]. Proceedings of the CSEE, 2018, 38(4): 1203.
[5] 周娟,孙啸,刘凯,等.联合扩展卡尔曼滤波的滑模观测器SOC估算算法研究[J].中国电机工程学报,2021, 41(2): 692.
ZHOU Juan, SUN Xiao, LIU Kai, et al. Research on SOC estimation algorithm of sliding mode observer with joint extended Kalman filter[J]. Proceedings of the CSEE, 2021,41(2): 692.
[6] 李孟秋,王龙. 一种改进的永磁同步电机低速无位置传感器控制策略[J]. 电工技术学报,2018, 33(9): 1967.
LI Mengqiu, WANG Long. An improved control strategy for low-speed sensorless PMSM[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1967.
[7] 李星雨,杜锦华,梁得亮,等.基于改进脉振注入法的永磁直线电机无传感器低速控制[J]. 电机与控制学报,2018, 22(12): 30.
LI Xingyu, DU Jinhua, LIANG Deliang, et al. Sensorless control of PMLSM based on fluctuating high-frequency signal injection at low speed[J]. Electric Machines and Control, 2018, 22(12): 30.
[8] BI G, WANG G, ZHANG G, et al. A novel demodulation method based high-frequency signal injection for sensorless SPMSM control considering cross-saturation effect[C]//2018 IEEE International Symposium on Industrial Electronics (ISIE), June 13-15, 2018, Cairns, QLD, Australia. 2018: 95-100.
[9] 吴春,陈科,南余荣,等.考虑交叉饱和效应的变角度方波电压注入永磁同步电机无位置传感器控制[J].电工技术学报, 2020, 35(22):4678.
WU Chun, CHEN Ke, NAN Yurong, et al. Variable angle square wave voltage injection for sensorless control of PMSM considering cross saturation effect[J]. Transactions of China Electrotechnical Society, 2020, 35(22):4678.
[10] 郭清风,杨贵杰,晏鹏飞. SMO在无位置传感器PMSM驱动控制系统的应用[J]. 电机与控制学报, 2007, 11(4):354.
GUO Qingfeng, YANG Guijie, YAN Pengfei. Application of SMO for sensorless driven and controlling system of PMSM[J]. Electric Machines and Control, 2007, 11(4):354.
[11] 梁戈,黄守道,李梦迪, 等. 基于高阶快速终端滑模扰动观测器的永磁同步电机机械参数辨识[J]. 电工技术学报, 2020, 35(S2):395.
LIANG Ge, HUANG Shoudao, LI Mengdi, et al. A high-order fast terminal sliding-mode disturbance observer based on mechanical parameter identification for PMSM[J]. Transactions of China Electrotechnical Society, 2020, 35(S2):395.
[12] 于永进,朱昱豪,周封,等. 基于模糊滑模与新型扩张状态观测器的SPMSM无速度传感器控制[J]. 电机与控制学报, 2022, 26(7):133.
YU Yongjin, ZHU Yuhao, ZHOU Feng, et al. SPMSM speed sensorless control based on fuzzy sliding mode and new expanded state observer[J]. Electric Machines and Control, 2022, 26(7):133.
[13] 申永鹏, 刘安康, 崔光照, 等. 扩展滑模观测器永磁同步电机无传感器矢量控制[J]. 电机与控制学报, 2020,24(8): 51.
SHEN Yongpeng, LIU Ankang, CUI Guangzhao, et al. Sensorless filed oriented control of permanent magnet synchronous motor based on extend sliding mode observer[J]. Electric Machines sand Control, 2020, 24(8): 51.
[14] GONG C, HU Y, GAO J, et al. An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM [J]. IEEE Transactions on Industrial Electronics, 2020, 67(7): 5913.
[15] DING H, ZOU X, LI J. Sensorless control strategy of permanent magnet synchronous motor based on fuzzy sliding mode observer [J]. IEEE Access, 2022(10): 36743.
[16] 孙恺英,李冬辉,姚乐乐,等. 基于新型超螺旋滑模自适应观测器的永磁同步电机转速估计策略[J]. 高电压技术,2020, 46(11): 3771.
SUN Kaiying, LI Donghui, YAO Lele, et al. Speed estimation strategy of permanent magnet synchronous motor based on novel supercoil sliding mode adaptive observer[J]. High Voltage Engineering, 2020, 46(11): 3771.
[17] LIANG D, LI J, QU R, et al. Adaptive second-order sliding-mode observer for PMSM sensorless control considering VSI nonlinearity [J]. IEEE Transactions on Power Electronics, 2018, 33(10): 8994.
[18] 刘计龙,肖飞,沈洋,等.永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报,2017, 32(16): 76.
LIU Jilong, XIAO Fei, SHENG Yang, et al. Survey on sensorless control technology of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76.
[19] 李贵彬,李永东,郑泽东,等.多相电机统一SVPWM调制及无速度传感器控制实现方法研究[J].电机与控制学报,2018,22(1):61.
LI Gubin, LI Yongdong, ZHENG Zedong, et al. Realization of uniform SVPWM modulation and speed sensorless control for multi-phase motors [J]. Electric Machines and Control, 2018, 22(1): 61.
[20] ZHANG X, HOU B, MEI Y. Deadbeat predictive current control of permanent-magnet synchronous motors with stator current and disturbance observer [J]. IEEE Transactions on Power Electronics, 2017, 32(5): 3818.
[21] AN Q, ZHANG J, AN Q, et al. Frequency-adaptive complex-coefficient filter-based enhanced sliding mode observer for sensorless control of permanent magnet synchronous motor drives [J]. IEEE Transactions on Industry Applications,2020,56(1):335.
[22] YE S, YAO X. An enhanced SMO-based permanent-magnet synchronous machine sensorless drive scheme with current measurement error compensation [J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2021, 9(4): 4407.
[23] 张立伟,李行,宋佩佩,等.基于新型滑模观测器的永磁同步电机无传感器矢量控制系统[J].电工技术学报, 2019, 34(S1): 70.
ZHANG Liwei, LI Xing, SONG Peipei, et al. Sensorless vector control system of PMSM based on a new sliding mode observer[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 70.
(编辑:刘素菊)
