基于模糊神经网络的无刷直流电机控制系统
2016-07-23杨瑞锋
杨瑞锋


摘要:基于传统的PID控制,对无刷直流电机转速引入模糊控制,设计了模糊PID控制器。再将模糊控制与神经网络融合,使模糊规则、模糊推理和隶属度函数映射于BP网络的结构和参数中,提取模糊PID控制器的输入/输出数据,训练 BP 神经网络,构建模糊神经网络(FNN)控制器,对无刷直流电机转速环实现了稳定控制。系统仿真结果表明模糊PID和模糊神经网络控制策略均优于传统 PID 控制,并使无刷电机控制系统的自适应能力、动静态性能以及抗负载扰动能力明显提高。
关键词:无刷直流电机;PID;模糊控制;BP神经网络;模糊神经网络(FNN)
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2016)17-0185-03
Abstract: Based on the traditional PID control, the brushless dc motor speed the introduction of Fuzzy control, Fuzzy PID controller is designed. Then the Fuzzy control and neural network are integrated, make the membership functions and fuzzy rules and fuzzy reasoning mapping of BP network structure and parameters, extracting of Fuzzy PID controller input/output data, training the BP neural network, construction of fuzzy neural network (FNN) controller, the brushless dc motor speed loop stability control is realized. System simulation results show that Fuzzy PID and Fuzzy neural network control strategy is superior to traditional PID control, and the adaptive ability of the control system of brushless motor, the dynamic and static performance, and obviously improve the ability to resist load disturbance.
Key words: Brushless dc motor; PID; Fuzzy control; BP neural network; fuzzy neural network (FNN)
无刷直流电机的产生凭借其体积小、重量轻、结构简单、维护方便、运行可靠、效率高等诸多优点,在许多领域得到了广泛应用[1]。由于无刷直流电机调速控制系统是多变量、强耦合的非线性系统,而传统的 PID 控制只适用于线性系统,并且主要依赖于系统精确的数学模型,在一些要求高精度、高性能的场合,PID 调速已不能满足较高的控制要求。因此,研究采用新型智能化控制方法提高控制系统的整体性能具有重要意义。
模糊控制是智能控制的一个重要分支,它是一种以模糊集合论、模糊语言变量和模糊逻辑推理为基础的计算机控制[2-4]。人工神经网络是从微观结构和功能上对人脑神经系统的模拟而建立起来的一类模型,具有非线性、学习能力和自适应特征[5]。
本文将模糊控制和神经网络控制相融合,优势互补,设计了一个模糊神经网络控制器对无数直流电机的转速环进行控制。通过仿真实验与传统PID控制进行比较研究。
1 PID控制
PID控制是将经过反馈后得到的误差信号分别进行比例、积分和微分运算叠加得到控制器输出信号。常规PID控制系统仿真模型如图1所示。
式中,KP为比例系数,
2 模糊PID控制器
模糊控制器设计:结构如图2所示。输入为偏差e和偏差变化率[ec=de/dt],输出量为实际控制量u。偏差 E、EC、U 的模糊子集均取:{NB,NM,NS,ZO,PS,PM,PB},论域均为[-6,6],选取正态分布隶属度函数。当控制系统输入为2500rpm时,设置比例因子分别为[ke=0.0024],[kec=0.000022],[ku=416]。对应的模糊控制规则如表1所示。
基于Matlab 2009a软件环境,对无刷电机(BLDCM)和逆变器模型搭建Simulink仿真模型。BLDCM参数:额定功率 P=1kW,额定转速[ne]=3000rpm,定子绕组相电阻R=2.875?,绕组自感L=8.5mH,互感M=1.2mH,转动惯量[J=0.008kg?m2],极对数[p=4]。参数设置:给定2500rpm,采样周期[Ts=5×10-5s],PID参数:[kp=100],[ki=5],[kd=0.1]。PID与模糊控制器切换点设置为12。模糊PID控制的无刷直流电机控制系统仿真模型如图3所示。
3 基于 BP神经网络的模糊神经网络控制器
BP神经网络是一种多层前馈神经网络[6],其结构如图6所示,网络由输入层、隐层、输出层组成。结构为i-j-m。[wij]为输入到隐层连接权,[wjm]为隐层到输出的连接权。
本文采用单输入/单输出的网络结构,隐层取15个神经元,即网络结构为1-15-1。将图3所示的模糊PID控制系统采集误差e和控制器输出u,作为网络的输入、输出量,共采集1000组数据样本,归一化后输入网络进行离线训练。参数设置:误差精度设置为0.00001,隐层函数为“tansig”,输出层函数选择“purelin”,训练方式为“trainlm”,该方法具有较快的收敛速度。将训练好的BP网络提取Simulink模型后作为模糊神经网络控制器,导入至电机控制系统,置换PID控制器如图7所示。然后还需调节归一化、反归一化参数,并进行给定输入、负载扰动作用下的实验。
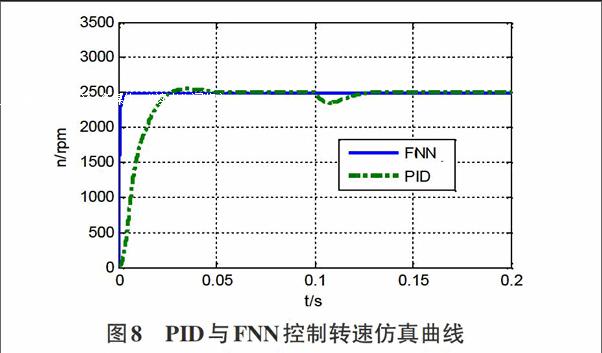
负载扰动为3[N?m],输入启动信号为2500rpm,测试响应曲线。将PID和FNN两种控制方法的转速仿真结果归纳为一个图,如图8所示。图中FNN表示模糊神经网络控制器。常规PID控制器参数:[kp=17] [ki=0.013],[kd=0]。两种方法控制器限幅值均为[-500,500]。
由图8明显看出,采用模糊神经网络控制性能比PID控制好很多,达到无超调,响应速度很快,抗负载扰动能力很强,而PID控制无论启动还是抗干扰适应能力弱。从而证明了模糊神经网络控制的优越性。
模糊控制与神经网络方法融合,是将神经网络的学习能力引入到模糊控制系统中,用神经网络来实现模糊控制中的模糊化、模糊推理、精确化计算。需要采集输入样本数据用 BP 算法对网络进行离线训练;利用训练好的网络,在线计算得到最佳输出。这种控制模式反应速度快,而且能充分发挥神经网络的自学习功能和联想记忆能力,对于未在训练样本中出现的情况,也可以通过联想记忆功能,做出最优控制决策,表现非常灵活。
在 Simulink仿真环境下建立模糊神经网络控制器模型后,即可实现模糊神经网络控制器与Power System Blockset仿真环境的有效连接。
5 结论
在 MATLAB环境中对无刷直流电机调速控制系统速度环进行PID控制仿真。在此基础上,设计了模糊PID控制器、模糊神经网络控制器,建立了无刷直流电机调速系统的仿真模型,并进行了给定输入、负载扰动作用实验。仿真实验结果曲线表明模糊PID控制、模糊神经网络控制均优于常规PID控制,动静态得到较大提高,尤其是模糊神经网络控制器具有较强的自学习、自适应和抗扰动能力,系统的可靠性、稳定性和鲁棒性好,从而证明了本文方法的有效性。
参考文献:
[1] 曹少泳. 基于 DSP 的 BLDCM 无位置传感器模糊 PID 调速系统的研究[D]. 华南理工大学,2007.
[2] 姜长生,王从庆,等. 智能控制与应用[M]. 科学出版社,2007:75-79.
[3] 韩俊峰,李玉惠. 模糊控制技术[M]. 重庆大学出版社,2003.
[4] 刘曙光,魏俊民,竺志超. 模糊控制技术[M]. 中国纺织出版社,2001.
[5] 飞思科技产品研发中心.神经网络理论与 MATALAB7实现[M]. 电子工业出版社,2005:18-20.
[6] 徐丽娜.神经网络控制[M]. 哈尔滨工业大学出版社,1999(5):3,7,12-15.
