5G技术远程操控R-OneTM机器人应用于经皮冠状动脉介入治疗的动物实验研究
2024-05-09余小林马玲郭自同刘永国林蕾孙洪军李国庆陈韵岱杨毅宁
余小林 马玲 郭自同 刘永国 林蕾 孙洪军 李国庆陈韵岱 杨毅宁
我国心血管疾病(cardiovascular disease,CVD)患病率和死亡率持续上升,其中冠心病人数1 139万;CVD也是我国城乡居民死亡的首要原因[1]。随着科学技术的发展,经皮冠状动脉介入治疗(percutaneous coronary intervention,PCI)已经成为冠心病的主要治疗方式[2]。PCl手术数量和复杂程度不断增加,介入医师因职业风险而罹患不同程度的放射性损伤、白内障、脊柱、骨关节疾病等,亦存在诱发恶性肿瘤和导致基因突变可能,患病率伴随手术量的增加而逐渐增加[3-5]。同时由于我国地域辽阔,医疗资源分布不均衡,分级诊疗的需求急切,因此,5G技术远程操控血管介入机器人(R-OneTM)辅助PCI是这种必然趋势的解决方案之一。
Beyar等[6-7]2005年首次提出远程辅助PCI手术概念,自2006年首次应用以来,机器人辅助PCI手术已被证明在简单病变中是安全可行的。随着网络技术的进步和术者经验的增加,血管介入机器人也逐渐开始应用于复杂的、更“真实世界”的病变,其安全性和有效性得到了进一步验证[8-10]。但是,解决术者的辐射不是血管介入机器人的唯一目标,还希望通过介 入机器人手术,能够辅助术者决策、增强术者的操作,进一步提高手术的安全性和有效性,解决远距离就诊问题,让边远地区患者享受到先进的医疗技术红利,同时又减轻放射性介入工作者因暴露在射线下引起的各种风险。
本研究采用的R-OneTM血管介入机器人创新性仿生搓捻技术,可以精确完美地复现医师手部操作动作,同时通过机械性夹持和毫米级递进,提供更好的运动稳定性和高精准度,提高了手术的精准性和安全性,同时减少了因器械非预期移位和精准定位时反复操作带来的患者辐射剂量和对比剂用量的增加(专利号:CN107847281B;CN106535808B)。由于其独特的技术设计,手术器械(导丝和球囊/支架导管)的引入和拆除仅需1 s。本次实验旨在研究在5G网络下R-OneTM血管介入机器人远程辅助完成动物猪PCI手术的安全性和有效性。
1 材料和方法
1.1 实验材料
1.1.1 R-OneTM冠状动脉介入手术系统 包括R-OneTM系统[知脉(上海)机器人有限公司]、移动式防辐射屏、数字减影血管造影(d igi t a l subtraction angiography,DSA)设备(Optima CL323i)、麻醉机(9300)。本研究获得新疆维吾尔自治区人民医院、中国人民解放军总医院、上海安助医疗科技有限公司动物伦理委员会审核批准(批件号码:2023-005)。
1.1.2 实验动物 3~4月龄的普通实验白猪3头,平均体质量(32±1)kg。实验动物购自甲干生物科技有限公司。
1.1.3 药物使用情况 舒泰50(2~3 mg/kg)、速眠新(1.5~2.5 mg/kg)、异氟烷(1%~5%吸入)、5%葡萄糖、阿司匹林、氯吡格雷、肝素钠、饱和氯化钾溶液(3 mol/L)10 ml、注射器(10 ml)4支、碘海醇注射液100 ml(对比剂)。
1.1.4 辅助器械 环柄注射器、“Y”阀、“三联三通”、压力延长管,7 F短鞘、压力传感器、0.014 in(1 i n=2.54 c m)导丝(ASA H I SIO N L OT 220524A01A)、 0.035 in导丝、JR 3.5导管、支架(Firebird2 LOT 86923129)。
1.2 实验方法
对3头普通白猪进行编号分别为SAP-1414、SAP-1415、SAP-1416,术前7 d提前采购入动物房饲养观察,健康状况无误纳入实验。
术前3 d每天给予阿司匹林(100 mg、每日1次,口服)和氯吡格雷(75 mg、每日1次,口服)。手术当天,肌注舒泰50(2~3 mg/kg)及速眠新(1.5~2.5 mg/kg)进行诱导麻醉,异氟烷(1%~5%吸入)呼吸麻醉,经股动脉穿刺,7 F导引导管经血管鞘止血阀插进血管鞘,在射线的指引下用1根0.035 in导丝的导引导管到达左或右冠状动脉开口,进行基线冠状动脉造影。测量并记录血管直径,任意选择两支冠状动脉血管,分别设为实验组(5G网络下R-OneTM远程辅助PCI)和对照组(R-OneTM本地辅助PCI)。
通过主从式控制方法(设置主端:北京及乌鲁木齐;从端:上海安助医疗动物研究中心,图1),研究人员在主端对R-OneTM系统旋钮进行操控,借助5G技术传输信号对从端R-OneTM系统进行控制,通过仿生搓捻技术以实现研究人员手部动作远程进行PCI手术。定义主端为远程控制端(实验组),从端为本地端(对照组)。

图1 远程操作主端-北京及乌鲁木齐,从端-上海安助医疗动物研究中心Figure 1 Remote operation master-Beijing and Urumqi,slave-Shanghai Anzhu Medical Animal Research Center
本地端对3只实验猪手动更换0.014 in导丝后,分别操作如下。(1)编号SA P-1414的实验猪采用R-OneTM系统本地模式进行右冠状动脉(right coronary artery,RCA)支架置入;随后采用R-OneTM(主端:新疆维吾尔自治区人民医院;从端:上海安助导管室)远程操作导丝进入左前降支(left anterior descending,LAD),到达目标位置后,进行支架置入。(2)编号SAP-1415的实验猪冠状动脉造影后,采用R-OneTM(主端:新疆维吾尔自治区人民医院;从端:上海安助导管室)远程操作导丝进入LAD进行支架置入;随后采用R-OneTM系统本地模式对左回旋支(left circumflex artery,LCX)进行支架置入。(3)编号SAP-1416的实验猪冠状动脉造影后,采用R-ONETM系统(主端:中国人民解放军总医院;从端:上海安助导管室)远程操作导丝进入LCX进行支架置入;随后采用R-OneTM系统本地模式对RCA进行支架置入。
所有远程操作从端均为上海安助同一导管室内同一台设备。
1.3 观察指标
从实验动物体内撤除一切器械、设备。术中实时心电监护猪的心率、血压及氧饱和度等生命体征,观察有无手术并发症。记录术中网络信号往返时间(round-trip time,RTT)延时、总延时(机器人系统延时+网络传输延时)、数据包丢失情况以及断网后网络恢复时间。
术毕,在实验动物麻醉状态下,注射过量肝素使其肝素化,再注射10 ml的饱和氯化钾溶液(3 mol/L)进行安乐死。进行解剖取样,取出心脏,分离冠状动脉血管进行病理分析。大体肉眼观察评价包括靶血管的血栓形成、炎症、动脉瘤、血肿、水肿、夹层、破裂等血管损伤,观察血管的组织反应的性质和程度,置入物的存在、形式和位置。组织学样本用10%的中性缓冲液福尔马林固定。从冠状动脉开口处,及其他目标血管的靶部位取一个横切面样本,用石蜡切片包埋。取4 μm切片,并用苏木素-伊红(hematoxylin-eosin,HE)染色,在显微镜下观察。
手术结束后,由远程术者及本地术者在术后及时填写生理负荷评价《局部不适体验量表》(local experienced discomf ort questionnaire,LED量表)、心理负荷评价《主观心智负荷量表》(subjective mental effort questionnaire,SME量表),以视觉模拟评分方式,对手术过程中的生理与心理感受进行回顾评价。
1.4 统计学分析
本研究采用描述性统计分析,符合正态分布的计量资料,采用均数±标准差表示;不符合正态分布的计量资料,采用中位数(四分位数间距)表示。两组之间采用t检验,以P<0.05为差异有统计学意义。
2 结果
2.1 PCI手术情况
全部实验组和对照组PCI成功率100%。导丝、支架均能顺利到达目标位置,无围术期不良事件,所有实验动物支架贴壁良好(图2),无血管夹层、痉挛等。心肌梗死溶栓治疗试验(thrombolysis in myocardial infarction,TIMI)血流分级Ⅲ级。造影记录测试前后目标血管情况(表1)。
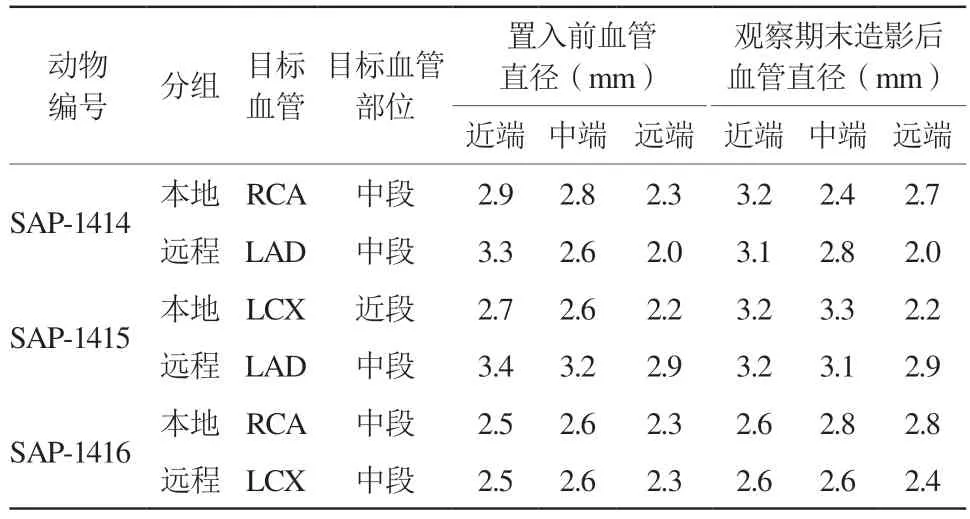
表1 实验动物手术及观察期末信息Table 1 Table of experimental animal surgery and observation end information

图2 术中支架置入图像Figure 2 Intraoperative stent placement image
2.2 肉眼大体观察
术后解剖肉眼大体观察,均未见冠状动脉破裂、出血、血栓形成和损伤等异常(图3)。
图3 实验动物心脏及冠状动脉解剖标本Figure 3 Anatomical specimens of the heart and coronary artery of experimental animals
2.3 病理HE染色
HE染色研究显示:冠状动脉形态完整,表面光滑,均一,未见损伤,冠状动脉内无血栓形成,周围组织未见损伤、淤血(图4~5)。

图4 实验猪SAP-1415 远程手术操作的血管段病理切片HE 染色(8 mm厚度) A.×4;B.×10;C.×40Figure 4 HE staining of paraffin sections of coronary arteries from experimental pigs (8 mm thickness)
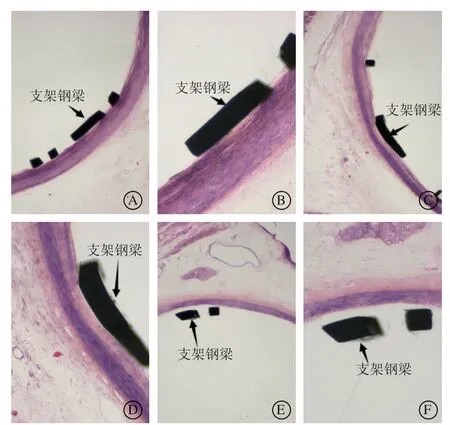
图5 实验猪SAP-1414 远程手术操作的血管段支架段的病理切片HE 染色 A.近端(×4);B.近端(×10);C.中段(×4);D.中段(×10);E.远段(×4);F.远段(×10)Figure 5 HE staining of the left main stem of the experimental pig
2.4 术中网络信息速率、延时及数据包丢失(表2)
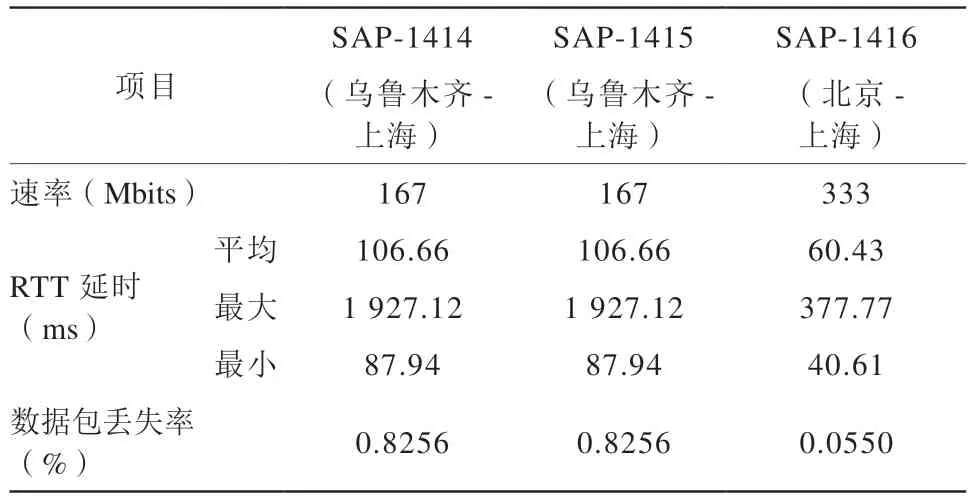
表2 术中网络信号速率、延时及数据包丢失率Table 2 Network signal rate,delay and packet loss rate during the operation
实验组手术期间未发生中途切换本地。SAP-1414、SRR-1415乌鲁木齐-上海(3 267 km)网络信号RTT延时平均106.66 ms(87.94~1 927.12 ms),数据包丢失率0.8256%、断网测试网络恢复时间<10 s,远程主-从端术者操作评价几乎无延时;术中DSA影像质量非常清晰,术中偶发瞬时RTT延时达到1 927.12 ms,能够观察到影像传输出现延迟和提示,但此时仅为造影观察,未进行手术操作;术中远程音视频传输几乎无延时,传输稳定且质量高;从端器械操控非常灵活。SAP-1416北京-上海(1 050 km)网络信号RTT延时平均60.43 ms(40.61~377.77 ms),数据包丢失率0.0550%、断网测试网络恢复时间<10 s,远程主-从端术者操作评价几乎无延时;术中DSA影像质量非常清晰,术中DSA影像传输几乎无延时;术中远程音视频传输几乎无延时,传输稳定且质量高;从端器械操控非常灵活。实验组手术结束后可一键转换本地操作,切换后本地设备主-从端操控性能未受影响,DSA影像和远程音视频均未受影响。由于R-OneTM系统为嵌入式软件,采用线缆连接,系统信号传输延时(医师控制台-机器人)远低于0.1 ms,可以忽略不计。系统在5G模式下,乌鲁木齐-上海(3 267 km)较北京-上海(1 050 km)信号传输RTT延时更长(106.66 ms比60.43 ms,P<0.001),差异有统计学意义。
2.5 手术医师术中生理负荷和心理负荷评价
手术医师术中生理负荷采用手术医师术后即刻填写LED量表评价。在血管介入导航控制系统辅助PCI手术过程中,右手操作体验综合评价介于“完全没有不适”和“操作几乎无不适”,双上肢和脊柱其他部位操作体验评价均为“没有不适”。整体操作体验评价为“没有不适”。
手术医师术中心理负荷采用手术医师术后即刻填写SME量表评价。在血管介入导航控制系统辅助PCI手术过程中,手术医师术中心理负荷评分均为10分,评价操作“一点也不困难”。器械性能整体评价为优。
3 讨论
随着血管介入手术机器人技术和5 G 远程医疗技术的发展,心脏介入治疗专家开始探索基于5 G 远程技术的血管介入机器人辅助P C I手术[11-12]。2021年,Ry a n教授[11]在波士顿通过远程血管介入手术机器人(C o r p a t h)控制台分别操控位于纽约(206 m ile)和位于旧金山(3 085 mile)的机器人在血管模拟器内完成PC I 手术,区域模型中20个靶病变的操作和横跨大陆16 个靶病变的连续操作,系统检测主-从延时在有线模式下横跨大陆模式对比区域模式为[(121.5±2.4)ms比(67.8±0.9)ms,P<0.001],在5G模式下横跨大陆模式对比区域模式为[(162.5±1.1)ms比(86.6±0.6) ms,P<0.001];尽管两种模式下延时差异有统计学意义,但是术者评价该延时均为“不可感知”。
5G 通讯技术具备“高通量、低时延、大连接”等优势,与机器人有效结合能够助力我国医疗服务移动化、远程化及智能化发展,使得远程手术能够得以实施。因此开发5G远程手术机器人系统并实现常态化应用,手术医师不受时间空间限制,让患者在当地即可获得优质的医疗服务,有助于优质医疗资源均衡化发展,真正让优质医疗服务普及大众。远程手术成功的关键是手术机器人中主-从系统操作一致性和实时性问题,还包括信号的稳定、抗干扰和高通量信号传输等技术问题[13],确保远程手术高效完成的关键在于数据传输速度。网络延时严重影响手术操作,数据传输延时影响手术操作时间,而延时随时间的变化,容易发生数据包的乱序,从而导致机器人操作手运动发生抖动。
R-OneTM血管介入机器人远程控制模块利用5G通讯技术多点布置灵活、大带宽、低延时、高可靠的优势,将DSA影像传递给手术专家,实现机器人远程控制,同时通过远程的实时音视频沟通,实现心脏介入手术专家对患者实施机器人远程PCI手术。R-OneTM血管介入机器人为嵌入式软件,端对端延时可忽略不计,增加5G远程机器人手术功能后,风险主要来自于5G网络传输的延时、丢包,以及断网。R-OneTM血管介入机器人远程控制模块采用5G网络切片、端对端控制,将控制信号、急停信号远程透传,远程操作的控制信号连续传输,保障数据传输的可靠性和稳定性。所有指令均为连续传输,实时更新远程控制手柄指令,降低网络延时和丢包对手术的影响。发生异常、断网或需要急救时,可一键切换本地操作或本地手动操作。
本研究借助5G技术远程(乌鲁木齐-上海、北京-上海)操控R-OneTM血管介入机器人,完成了医师远程控制机器人操作完成PCI手术的研究,借助5G技术,R-OneTM机器人可远程全流程实施导丝、球囊、支架的连续操作,系统检测5G模式下乌鲁木齐-上海的主-从RTT延时平均106.66 ms,数据包丢失率0.8256%;北京-上海的主-从RTT延时平均60.43 ms,数据包丢失率0.0550%,术者评价该延时均为“不可感知”(几乎无延时)。术中DSA影像质量非常清晰,影像传输几乎无延时;术中远程音视频传输几乎无延时,传输稳定且质量高,本研究验证了该系统完成5G远程冠状动脉血管介入治疗的安全性和有效性符合临床需求。值得注意的是,乌鲁木齐-上海远程手术中曾出现瞬时网络抖动,瞬间RTT延时达到1 927.12 ms,此时正值造影时,术者能够观察到DSA影像传输“明显延时”。北京-上海远程手术时瞬间最大RTT延时378 ms,术者评价“不可感知”(几乎无延时)。因此建议,对于要实施远程手术的地点进行信号加强,例如在手术室增加5G室内分布系统微基站或天线,从而增加信号强度、稳定性和降低延时。根据既往研究文献,5G远程系统整体延时≤330 ms[14],术者感知不到延时。根据本次研究,当5G网络出现抖动,RTT延时达到375 ms时,术者能够感知到轻度延时,但减慢操作动作可以继续完成手术操作。因此笔者认为,当RTT延时介于330 ms~375 ms时,手术操作进入“黄灯”区,术者需要谨慎操作,但无需马上终止手术操作。因此建议,如果准备实施5G远程手术前测试信号不符合上述数据,则需要增加室内分布系统,成功验收后再进行手术。此外,手术中应对超过该延时向术者进行提示,术者判断是否停止手术操作。但不建议瞬间强行中断手术操作,以免患者发生危险。
冠状动脉介入作为现代医学发展最为迅速的一个分支,随着5G技术的快速发展,使得介入手术机器人系统有了更多的应用场景,这将从根本上为无法及时预送至心血管介入中心的患者提供拯救生命的机会[13,15-19],有助于更好地实现分级诊疗。但目前的介入手术机器人系统仍然存在局限性,缺少相应的力觉反馈机制,视觉与图像补偿有一定作用,但与实际手术中的反馈还有距离;根据其学习曲线,青年医师需要进行相应的操作培训;对一些严重钙化病变、慢性闭塞病变等需要多种器械治疗的复杂病变手术操控性不高。在未来可以增加力觉与视觉补偿的反馈、多种器械操作等更多的功能来完成更加复杂的病变手术,同时,与血管内超声、光学相干断层成像等腔内影像设备的一体化融合将为精准PCI提供更为广阔的应用前景[18]。本研究借助5G网络技术,远程操作R-ONETM冠状动脉机器人对实验动物进行PCI,获得了初步的操作体验评价,无显著的可被人识别的延迟体验。然而,由于对照组(本地操作通过线缆连接)延时低于0.1 ms,无法作为检验分析的基础数据,因而未对实验组和对照组进行对照分析,外推性不足,将来需进一步优化实验设计,提供更详实科学的理论依据。
利益冲突 所有作者均声明不存在利益冲突
猜你喜欢
——导丝概述及导丝通过病变技巧
