基于机器视觉的自动贴标系统设计
2024-03-13李辉,刘柱
李 辉,刘 柱
(1.盐城工学院 电气工程学院,江苏盐城 224007;2.常熟理工学院 电气与自动化工程学院,江苏苏州 215500)
0 引言
目前,对贴标机的研究更多是在机械结构和控制方法上的改进,如采用超高速转轮的轮式贴标机[1],加快了贴标的速度;在多功能扩展方面有带自动封装功能的小型化贴标机[2];有采用SolidWorks建模进行有限元分析[3-5],运用PLC进行整套系统运动控制的贴标系统[6]。社会的发展带来更加细分化的应用场景,如在医疗领域,为提高医护人员工作效率而设计的血样试管贴标机[7];在物流领域,带有自动打印功能的多功能贴标机[8],和给手机锂电池电芯贴标的安全贴标机[9]。
图像处理的算法层出不穷。在图像识别区域,有采用卡尔曼滤波对筛选出的信息进行二次计算,将最终姿态与数据进行拟合预测的视觉模块[10]。但此类方法逻辑较为复杂,工业生产中实际运算能力有限,应用较有限制。本文改进系统的结构硬件和视觉识别算法,使其在兼顾效率的同时,更贴合实际生产。
1 系统设计
1.1 系统的总体框架
如图1所示,自动贴标系统的基本框架主要依托于工控机的虚拟仪器技术。通过编写或导入需要运行的程序到运动控制卡,自动贴标系统执行运动控制卡的命令,并接收相关传感器和操作员下达的指令,以控制机械手运动、电机旋转、气缸运动,以及接收运行位置信息的反馈。在此过程中,工控机通过传感器和机械手的信号确定运动的完成情况,并将其显示在显示器上。系统主要可调流水线机构、载具交互机构、翻转机构、机械手及相关机构、打印机机构等组成。

图1 系统的基本框架Fig.1 Basic framework of the system
1.2 系统的工作流程
系统总体结构如图2所示。首先根据彩盒尺寸调整载具的宽度;然后手动将彩盒放置在载具A上;随后,载具A夹紧彩盒并将其输送至防呆相机,以确认盒子是否正确;最后,彩盒被输送到贴标位并顶升等待贴标。此时,六轴机器人取条形码(UPC),四轴机器人取密封标签。随后下相机(CCD)1拍摄UPC照片,下CCD2拍摄密封标签照片,并确定两者在各自的吸标头位置。六轴机器人贴上UPC,而四轴机器人贴上密封标签。完成后,顶升机构复位,彩盒进入翻转机构,进行180°旋转后进入核号机。

图2 总体结构Fig.2 Overall structure
1.3 可调流水线机构的设计
图3所示为一种可调节流水线结构,其宽度可根据需求进行调整,以适应6种不同产品的宽度要求。

图3 可调流水线机构Fig.3 Adjustable assembly line mechanism
1.4 机械手及相关机构的设计
图4所示为六轴机械手臂及其相关组件。六轴机械臂首先移动至打印机位置吸附标签;然后移至下CCD镜头拍摄标签位置;最后根据拍摄数据移动至彩盒贴标位置,进行贴标操作。
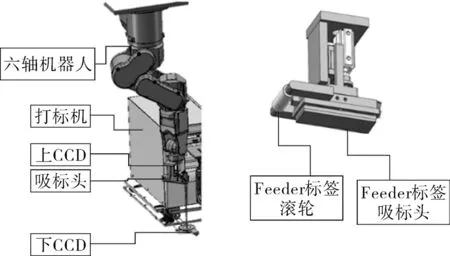
图4 六轴机械手及相关机构Fig.4 6-axis manipulator and related mechanisms
图5所示为四轴机械人的结构。四轴机器人先移动至飞达位置吸取标签,然后移至下CCD镜头拍摄标签位置。根据上CCD拍照数据,四轴机器人移动至彩盒贴标位置进行贴标。吸标头1先将标签贴在彩盒上,吸标头2负责将标签下压并贴在侧面。
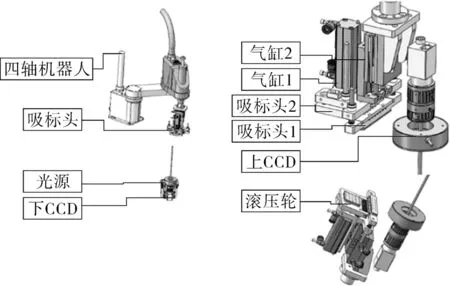
图5 四轴机械手及CCD相机Fig.5 4-axis manipulator and CCD camera
1.5 打印机机构
图6所示为打印机机构。由于标签材质较软,采用皮带式接标台以避免出标过程中的拱起现象。出标完成后,扫码枪进行扫码确认,确保一维码在贴附前能够正常读取。若需更换标签,仅抽出直线导轨即可顺利进行。
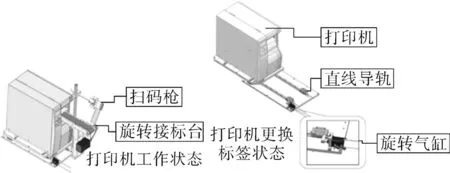
图6 打印机机构Fig.6 Printer mechanism
2 控制流程
2.1 翻转工作站及机械手初始化
图7所示为翻转工作站初始化流程。

图7 翻转工作站初始化Fig.7 Flip workstation initialization
六轴机械手和四轴机械手初始化相同。机械手IO启动,通讯连接正常后,发送指令使机械手回原点,至此机械手初始化完成。
2.2 载具1移载工作站
图8所示为载具1移载工作站流程图,主要用于物料的移载和顶升。
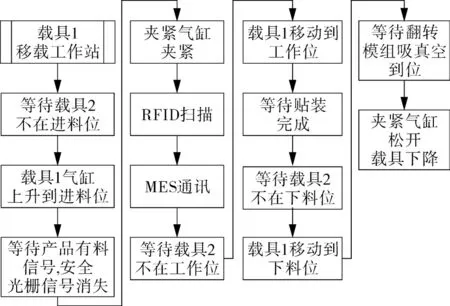
图8 载具1移载工作站流程设计图Fig.8 Process design diagram of vehicle 1 workstation
收集载具1升降气缸上升位和下降位信息,经过汇川板卡传输的IO信号创建数组,然后将布尔数组进行数值转换,通过条件结构选择。如果没有收到信号,为“1”,则弹出弹窗显示载具1上料状态错误,退出检查程序;如果收到信号,为“2”,则表示载具检测到信号,更新载具状态为进料等待位,等待操作员上料完成。
2.3 打印机工作站
图9所示为打印机工作站工作流程。

图9 打印机工作站工作流程Fig.9 Workflow of printer workstation
3 目标检测算法
3.1 标签的预处理
在实际的工业生产中,由于各方面的因素,通常标签的贴合、图片的摄取不理想,需要对图片进行矫正。无论是应用coco,Labelme等数据集的动态检测[11-12],还是用各种静态信息的获取[13],都取得不错的效果。但对算力有一定要求的方法成本偏高,此时就要选择合适的处理方法。
设计采用工业上常用的halcon软件,图片预处理调用orientation算子计算倾斜角,求出中心像素点后旋转图像,使其被矫正到正确方位。
针对图像断点不清或者模糊像素过于扩散等问题,采用膨胀和腐蚀算法。灰度形态学是与二值形态学相对应的另一种形态学运算。与二值形态学相比,灰度形态学不仅在图像本身的空间尺寸上有变化,而且图像本身的灰度值也有变化。
灰度形态学膨胀在数学上的定义用下式表示:
式中 F——原始图像;
K—— 对原始图像进行膨胀运算的结构化要素;
⊕g——灰度形态学膨胀运算。
描述为,作用在原始图像F中(m,n)坐标的灰度值,分别向右移动(a,b)个单位,再加结构化元素的K(a,b)值,取其求得的最大值。
如遇画面粘连不清,则采取锐化腐蚀等手段。灰度腐蚀的运算在数学上的定义如下式所示:
式中 ⊖g——灰度形态学腐蚀运算。
与灰度膨胀类似,灰度腐蚀的运算可以描述为,将原始图像的像素点移动(a,b)个单位,再减去结构化元素K在坐标(a,b)处的值,求取集合中的最小值。灰度腐蚀的显著效果不仅可以使得图像的尺寸变小,其灰度值也会变小。
3.2 识别算法的改进
对于标签的识别,halcon有自带条码识别算子create_bar_code_model和find_bar_code。而快递标签处有很多的文字、符号和边框,增大了定位的难度,会有检测不到条码的情况。常采用Blob Analysis方法,其作用是对图像中相同像素的连通域(Blob)进行分析。其过程是将图像进行二值化,分割得到前景和背景,然后进行连通区域检测,从而得到Blob块。但Blob分析法对相机像素有较大的要求。加入基于拉普拉斯算子的边缘提取,可有效增强系统识别的稳定性,表示如下。
输出函数:
通过输出图像对比发现,处理后有一定的锐化效果,使得边缘更加的清晰,对比度有进一步的提升。
4 试验与分析
4.1 识别模块的软硬件搭建
设计选用相机需具备高灵敏度和低噪声特性,适用于捕捉详细的图像和具备低光成像功能,有多种视频输出、高分辨率成像、可调节的快门速度和远程控制的曝光控制等功能,故选用具有1 200万像素分辨率的康耐视相机。
运用for循环对视觉识别环节进行补偿,作用在安装有CCD相机的机械手上。
4.2 试验数据与分析
对随机标签进行数据采集,选取600张图片进行识别测试。其中200张为正常图像,命名为测试集A;200张为连线断裂、信息带有缺失的图像,命名为测试集B;200张为连接线粘连、字迹模糊的图像,命名为测试集C。
为比较改进算法的识别效果,主要从字母数字字符识别率、汉字识别率和标签识别准确度3个方面对算法进行评估。其中字母数字字符识别率和汉字识别率主要是分析模糊字符、字符粘连等识别率低的原因。标签识别准确率和字符识别准确率主要是分析改进算法性能是否能够达到工业要求。
与传统的字符分割法和Blob分析进行试验效果对比,分析标签、字符、汉字识别准确率,结果如表1所示。

表1 试验对照结果Tab.1 Experimental control results %
在Test2和Test3中,改进算法较传统分割字符识别算法,标签识别准确率分别提升6.0,6.4个百分点,字符识别准确率分别提升11.4,10.1个百分点。
对现有的传统贴标流水线和改进后的方案采取5次循环为1轮,共20轮的对比验证。记录工作的完成时间和贴取的准确率等参数,取平均值。其中,传统算法1轮用时302 s,贴标准确率为98.0%,而改进后的方案分别为279 s,99.1%。
在多轮长时间的运行后,系统的稳定性、识别率和运行效率都有改善,平均用时缩短23 s,识别率上升1.1个百分点。但系统运行频率提高后,流程加快,机械手贴标力度需要人为设定,后面可根据被贴标产品的材质自行定义运动矢量。
5 结语
本文设计的自动贴标机构,综合应用电气自动化与图像处理技术,其构成主要包括剥料机、机器人、打印机以及控制系统。适用于小型产品的外包装标签、识别码等贴标领域,表现出显著的优势。首先,其结构简洁且能高效地实现复杂的贴取过程,主要归功于其分层级的机械结构设计,使得后续机构可以根据物料的大小做出自适应调整,从而适应不同规模的贴标系统,体现出更强的自适应性。其次,该机构展现了紧密的结构设计,使其可以实现一些物料的打包、贴标功能,具备良好的可移植性。最后,研究为物料的生产封装提供了一种较新的解决方案,为该领域的发展提供新的可能性。