基于模糊滑模控制的PMSM 矢量控制系统
2024-03-06余莉,陈琦
余 莉,陈 琦
(1.南京信息工程大学 自动化学院,南京 210044;2.南京信息工程大学 江苏省大气环境与装备技术协同创新中心,南京 210044)
随着永磁材料的发展,永磁同步电机(PMSM)的性能有了极大的提升,并且结合电力电子技术和微处理器的发展,PMSM 逐渐被应用到更多的领域[1-2]。当前,PMSM 的控制大多采用双闭环矢量控制方式,该方式的速度环一般采用PI 控制器,PI 控制器结构简单、易于实现,但抗扰动能力较弱,因此,许多专家学者都对速度环进行改进优化,以期得到更好的控制效果。较为常见的改动如滑模控制算法[3-5]、对PI 控制器进行自适应调节[6-8]、加入自抗扰控制[9-11]等。文献[12]将滑模算法应用到PMSM 控制中,减少了响应时间。文献[13]使用扰动观测器对滑模算法进行了优化,在提高系统动态性能的同时,抑制了滑模抖振。文献[14]使用模糊算法对PI 控制器的参数进行调节,提高了PI 控制器的抗扰动能力。
为了提高控制性能,同时进一步降低滑模抖振,本文设计一种积分滑模控制器(SMC),并引入一种新型饱和函数来降低滑模抖振;并使用模糊算法对滑模趋近律的参数进行自适应调节,提高电机在运行状态突变时的抗扰动能力。最后搭建仿真模型对模糊滑模控制器的可行性和有效性进行验证。
1 永磁同步电机数学模型
三相表贴式PMSM 在理想状态下工作时,满足如下情况:定子绕组三相对称,不计铁芯磁饱和,不计电机涡流以及磁滞耗损等[15]。基于两相旋转坐标系写出表面式PMSM 的电压方程:
式中:id、iq分别是两轴的定子电流;Rs是定子电阻;Ls是定子电感;ωe是转子电角速度;ψf是永磁体磁链;ud、uq分别是两轴的定子电压。
电机在dq 轴系下的电磁转矩方程:
式中:pn是电机极对数;Te是电磁转矩。
电机在dq 轴系下的拖动方程:
式中:B 是阻尼系数;ωm是机械角速度;TL是负载转矩。
2 自适应滑模速度控制器的设计
2.1 滑模面选取
由于选取的控制方式是矢量控制中的id=0 的方式,将PMSM 数学模型由式(1)的电压方程形式改写为电流方程形式,其表达式为
为区别于传统微分滑模控制器[16],使用积分方法对系统状态变量进行如下定义:
式中:ωref是机械角速度的给定值。将式(5)代入式(4)中,可得:
对式(6)中的变量进行如下定义:
将滑模面定义为如下形式:
2.2 自适应趋近律设计
滑模控制器的趋近律选用如下形式:
式中:k、p 均大于0。增大k 的值可以提高状态变量到达滑模面的速度,但会增加滑模抖振。因此,将k设计为随状态变量自适应变化,其关系如式(10)所示,在保证趋近速度的同时,抑制抖振。
式中:k0为正常数,则滑模趋近律可写为如下形式:
2.3 新式饱和函数的设计
由于符号函数sign 不具有连续性,控制器的抖振较大,因此设计一种连续的新式饱和函数如下:
式中:常数a>1。A(x)的图像如图1 所示。

图1 新式饱和函数Fig.1 New saturation function
从图中可知,当系统运行时,a 的值过大,会使图像近似于符号函数,无法对滑模抖振起到抑制作用;但如果a 的值过小,会使近似于开关函数作用拥有高增益快响应的区域减小,减低系统的鲁棒性并延长响应时间。因此,需要选取合适的参数。
基于A(x)的滑模趋近律如下所示:
对式(8)进行求导,将其与式(13)联立,再将式(6)代入,可得q 轴的参考电流如下:
2.4 控制器稳定性判断
定义如下的李雅普诺夫函数来对控制器的稳定性进行证明:
根据李雅普诺夫稳定性判据,当V˙<0 时,滑模状态变量能够到达滑模面。由式(15)可得:
在状态变量到达滑模面之前,易知式(16)恒小于0,满足稳定条件,控制器是稳定的。
3 模糊滑模控制器的设计
假设状态变量运动在s<0 的区间,对式(9)进行求解,可得:
由式(17)可知,增大p 的值可以提高滑模趋近速度,但也会增大抖振,因此使用模糊控制方法对p的值进行调节。
选取s 和s˙作为模糊控制的输入量,组成双输入单输出的模糊控制系统。
将精确的输入量和输出量进行模糊处理,得到模糊集。定义s 的论域为{-1515},定义s˙的论域为{-33},定义p 的论域为{4001000}。其对应的模糊语言变量值均为{NB(负大),NM(负中),NS(负小),Z(零),PS(正小),PM(正中),PB(正大)}。根据前文的模糊规律制定表1 所示模糊规则表。

表1 模糊规则表Tab.1 Fuzzy rule
输入和输出的隶属度函数选取三角形和s 形隶属度函数,如图2~图4 所示。

图2 s 的隶属度函数图像Fig.2 Membership function of s
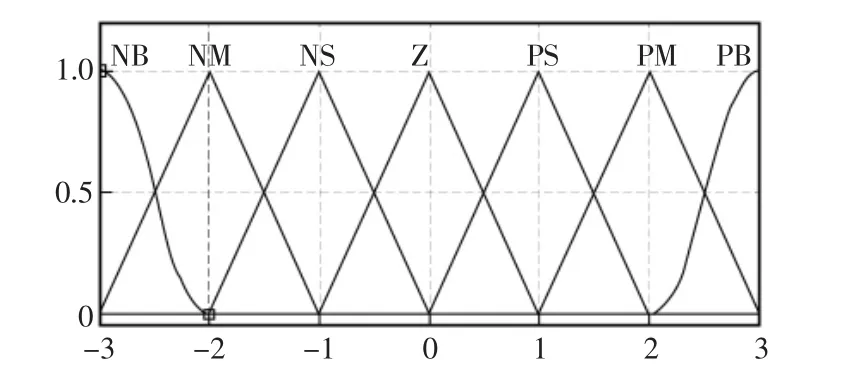
图3 的隶属度函数图像Fig.3 Membership function of s˙
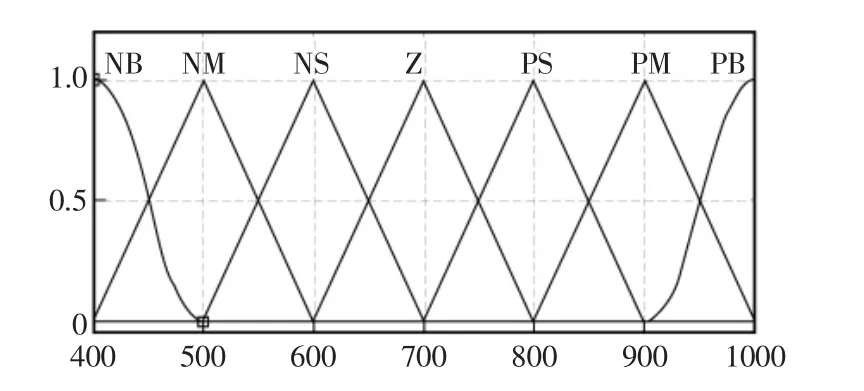
图4 p 的隶属度函数图像Fig.4 Membership function of p
最后通过重心法进行解模糊计算,就可以得到调节后的p 值。重心法具体计算过程如下:
式中:pj是第j 个论域的中心值;是第j 个论域的输入函数隶属度。
由此可得,模糊滑模速度控制器的参考电流模型为
4 仿真实验分析
为验证本设计中的模糊滑模速度控制器的可行性及其控制效果,在Simulink 软件中分别搭建基于模糊滑模控制器的PMSM 矢量控制模型,以及基于传统滑模控制器的PMSM 矢量控制模型[16],并对2 种方法的仿真结果进行对比。设置PMSM 参数如表2 所示。

表2 PMSM 电机参数Tab.2 PMSM parameter
滑模速度控制器中,参数c 的取值为80,k0的取值为200。基于模糊速度控制器的PMSM 矢量控制框图如图5 所示。

图5 基于模糊滑模控制器的PMSM 矢量控制框图Fig.5 PMSM vector control block diagram based on fuzzy sliding mode controller
4.1 转速仿真实验
首先,设置2 种方案均为空载启动,设置初始速度为1200 r/min,0.2 s 时给定转速突升为1500 r/min,在0.4 s 时突降为1000 r/min,仿真时间0.6 s。图6~图8 是传统滑模控制器和模糊滑模控制器2 种方法的仿真对比结果。
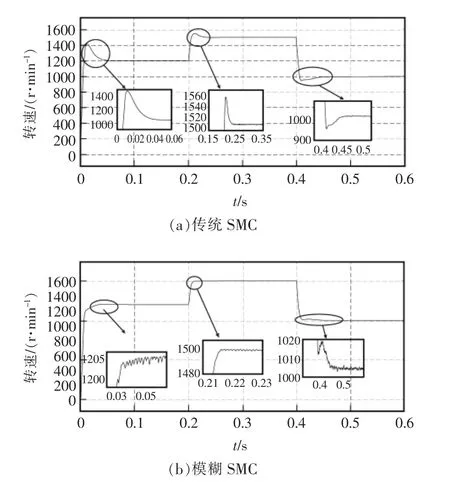
图6 转速实验转速波形图Fig.6 Speed waveform of speed experiment
从图6 可以看出,在启动时,传统SMC 的超调量较大,约14%,且用时0.05 s 达到稳定,而模糊SMC 无超调量,达到稳定用时不到0.04 s;在转速突变为1500 r/min 时,传统SMC 超调量很小,达到稳定用时约0.04 s,而模糊SMC 无超调量,达到稳定用时0.01 s;当转速降为1000 r/min 时,传统SMC 用时约0.07 s 达到稳定,而模糊SMC 达到稳定用时也是0.07 s。说明在转速发生突变时,模糊SMC 在保证较小超调量时,可以更快达到稳定。
从图7 和图8 中可以看出,2 种SMC 的电流和转矩波形都可以快速稳定,稳定后,电流波形的正弦程度较高,相较于传统SMC,在转速变化时,模糊SMC 的三相电流和转矩波动稍小。这说明模糊SMC 拥有较好的鲁棒性,对滑模抖振有较好的抑制作用。
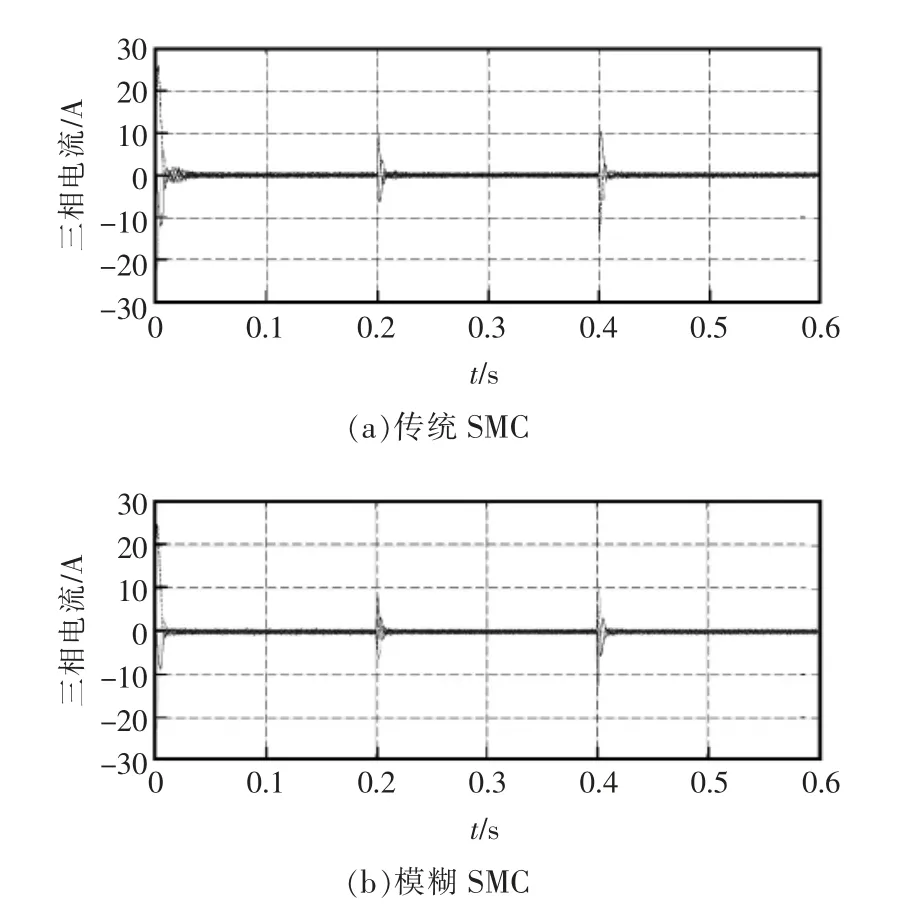
图7 转速实验三相电流波形图Fig.7 Three phase current waveform diagram of speed experiment

图8 转速实验转矩波形图Fig.8 Torque waveform of speed experiment
4.2 负载仿真实验
设置2 种方案的初始负载为5 N·m,设置初始速度为1500 r/min,在0.2 s 时负载突变为10 N·m,在0.4 s 时负载突降为0,仿真时间0.6 s,仿真过程中转速不变。图9~图11 是传统滑模控制器和模糊滑模控制器2 种方法的仿真对比结果。
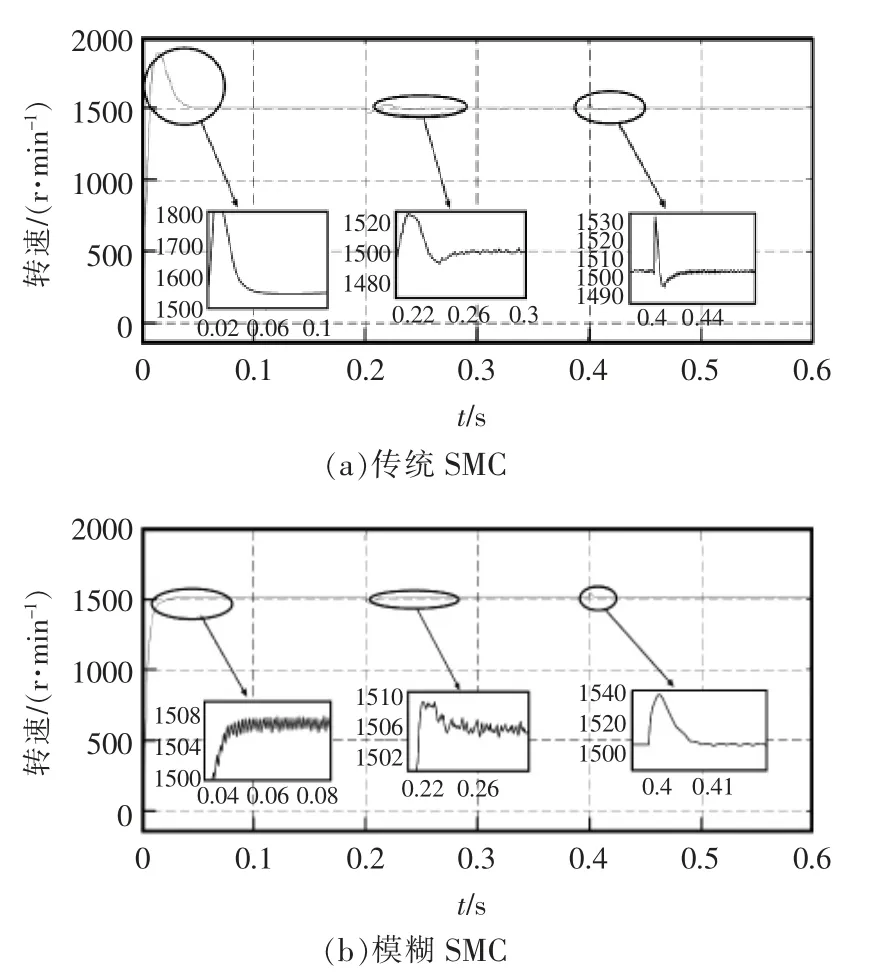
图9 负载实验转速波形图Fig.9 Speed waveform of torque experiment
从图9 可以看出,由于带载启动的原因,传统SMC 的超调量较大,超过20%,且用时0.06 s 才到达稳定,而模糊SMC 仍没有超调,且用时0.04 s 就到达稳定;当负载变为10 N·m 时,传统SMC 到达稳定需要0.06 s,而模糊SMC 只用时0.04 s;当负载变为0 时,传统SMC 用时0.02 s 到达稳定,而模糊SMC 用时不到0.01 s。
从图10 和图11 可以看出,在负载发生变化时,2 种方法的电流波形和负载波形均无较大波动,相较于传统SMC,模糊SMC 的波动稍小。这说明当负载发生变化时,模糊SMC 拥有更好的抗扰动能力。

图10 负载试验三相电流波形图Fig.10 Three phase current waveform diagram of torque experiment

图11 负载试验转矩波形图Fig.11 Torque waveform of torque experiment
5 结语
针对传统PI 速度控制器无法满足PMSM 控制更高要求的问题,本文在传统滑模控制器的基础上,设计一种积分滑模控制器,并使用模糊算法对控制器参数进行自适应调节,并引入新式饱和函数替代符号函数。在仿真对比分析之后,可以得出如下结论:①新式饱和函数的应用对抖振有较好的抑制作用;②使用模糊算法对参数进行自适应调节,提高了系统的鲁棒性和抗扰动能力,并提高了系统的响应速度。
