无人机载光电吊舱技术发展现状
2024-03-06任星宇张明闯
任星宇,张明闯,温 泉,马 瑞
(1.北京航天控制仪器研究所,北京 100089;2.北京航天长征飞行器研究所,北京 100076)
在现代战争体系中,信息技术和装备技术的高低已成为决定战争结果的关键因素之一。在此情况下,战争的概念和形态已从冷兵器和单兵作战转向信息化体系下的联合作战,使作战更加高效和协同。无人机系统作为当前战争体系中的主力军,其技术的发展对战争的胜败至关重要。
无人机系统的核心设备是光电侦察吊舱。在军事侦察任务中,通常要求吊舱能侦察到尽可能远距离的目标,这就要求吊舱具有极高的视轴稳定精度。为了提高吊舱的视轴稳定精度,从结构上可采用提升吊舱框架数目来提升吊舱的视轴稳定精度,例如采用两轴四框架构型可有效隔离外界风阻力矩[1-2],使内框架受到的扰动更小。但两轴四框架构型会使得系统结构更加复杂,并使有效载荷空间减小。此外,还要考虑电机的体积、力矩波动、力矩储备等[3]。
为兼顾经济性和高稳定精度的要求,基于快速反射镜的二级稳定光电吊舱应运而生。该类型的光电吊舱采用两轴两框架构型,在载荷视轴的入射端增加了快速反射镜,通过快速反射镜补偿载荷视轴经框架一级稳定后的角位置偏移量,实现光学视轴的二级稳定,进一步提高载荷视轴的稳定精度[4-7]。采用基于快速反射镜的二级稳定光电吊舱通过增加载荷器件来提升吊舱视轴的稳定精度,具有结构简单、有效载荷空间大、视轴稳定精度高等优点。因此,研究该类型光电吊舱对吊舱的发展具有重大意义。
1 机载光电侦察吊舱的结构组成与稳定方式
光电吊舱通常由光电载荷、受控回转框架、陀螺、电机等构成。按照其受控框架类型可分为两轴两框架吊舱、三轴三框架吊舱、两轴四框架吊舱等[8]。以上结构的光电吊舱通过陀螺敏感框架扰动,使电机运动以抵消干扰,减小光电吊舱中光学载荷的视轴抖动,满足远距离侦察任务所要求的图像清晰度和目标跟踪定位精度。图1 所示为光电吊舱框架类型示意图。

图1 光电吊舱框架类型示意图Fig.1 Schematic diagram of frame type of photoelectric pod
无人机载光电侦察吊舱根据内部有效载荷的功能不同,可分为侦察吊舱、导航吊舱、察打一体吊舱、测量吊舱等,并根据功能的不同执行辅助导航、侦察与监视、光电探测等任务。为满足气动和隐身需求,吊舱外形通常设计成球状或柱筒状。图2 所示为“彩虹”系列无人机及其搭载的光电侦察吊舱示意图。
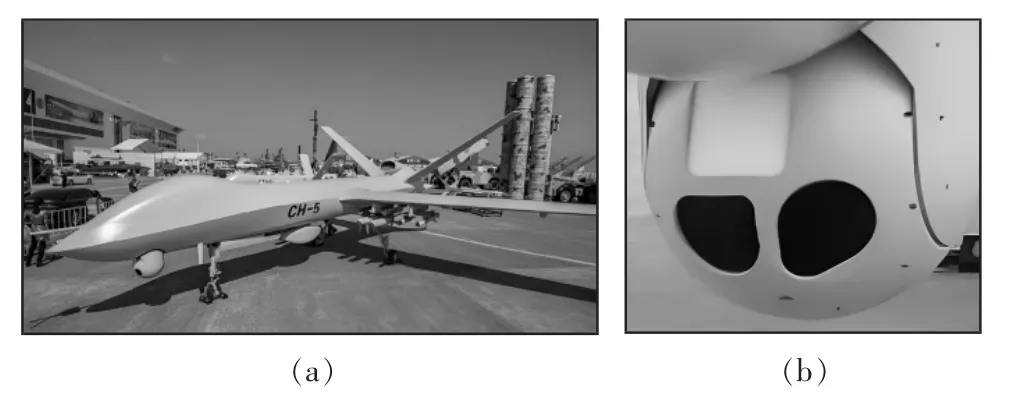
图2 无人机及其光电稳定平台安装示意图Fig.2 Installation diagram of UAV and its photoelectric stabilization platform
目前光电吊舱实现视轴稳定或图像稳定的方法主要包括基于陀螺的受控框架稳定技术(一级稳定)、电子学图像增稳等。其中,基于陀螺的受控框架稳定可分为①平台式稳定:陀螺与载荷安装在同一平台上,由陀螺敏感平台的扰动,之后将扰动以角度变化率的形式传输至控制回路中,通过控制回路驱动永磁同步电机使平台转动,用以补偿扰动对视轴的影响,使载荷光轴在空间内保持稳定;②捷联式稳定:将陀螺与载荷分开安装,一般将陀螺安装在平台外部,载荷安装在平台上,通过2 个正交的陀螺分别感应出平台在陀螺安装轴方向上的旋转量和在垂直于安装轴方向的旋转量,之后驱动永磁同步电机实现平台的空间稳定[9-11]。
随着无人机技术的发展,无人机的飞行高度更高,飞行速度更快,需要侦察的场景更多变复杂,从而对光电侦察吊舱的性能提出了更高的要求。因此需研制载荷数量更多、作用距离更远、视轴稳定精度更高的先进光电侦察吊舱。然而采用基于陀螺与受控框架的视轴稳定技术的光电侦察平台,即使是可达到同类最高精度的两轴四框架构型,也由于受到摩擦力、大惯量及框架形式等因素影响,其视轴稳定精度的上限为10~20 μrad,很难进一步提高。为实现更高稳定精度的要求,必须研究新的稳定控制方式。光学快速反射镜稳定,也称二级稳定,是在框架稳定的基础上,利用快速反射镜高精度和大带宽特性对残余的视轴抖动进行补偿,从而实现光电吊舱10 μrad 以内的高精度视轴稳定。
2 国内外发展现状
2.1 国外发展现状
国外对无人机载光电吊舱技术的研究起步较早。目前,基于传统框架稳定平台的一级稳定光电吊舱技术已相当成熟。加拿大L3-WESCAM 公司生产的MX 系列光电吊舱可携带多种类型的光电载荷,并执行多种任务,其中最先进的MX-25D 型光电吊舱重量为90.75 kg,采用6 轴减振技术,使其稳定精度可以达到3 μrad。美国FLIR 公司设计的Star SAFIRE-380HD 系列吊舱拥有六轴交叉稳定结构,稳定精度优于5 μrad,高稳定精度使得内部载荷的识别距离超过20 km。法国Safran 公司设计的EUROFLIR-410 系列吊舱采用高度集成模块化设计理念,可为不同任务配置不同的载荷,稳定精度优于20 μrad。此外,以色列的Elbit-System 公司、美国Lockheed-Martin 公司以及英国Roll-Royce 公司等也设计并生产了一系列基于传统框架稳定平台的光电吊舱。图3 所示为不同公司生产的光电侦察吊舱。
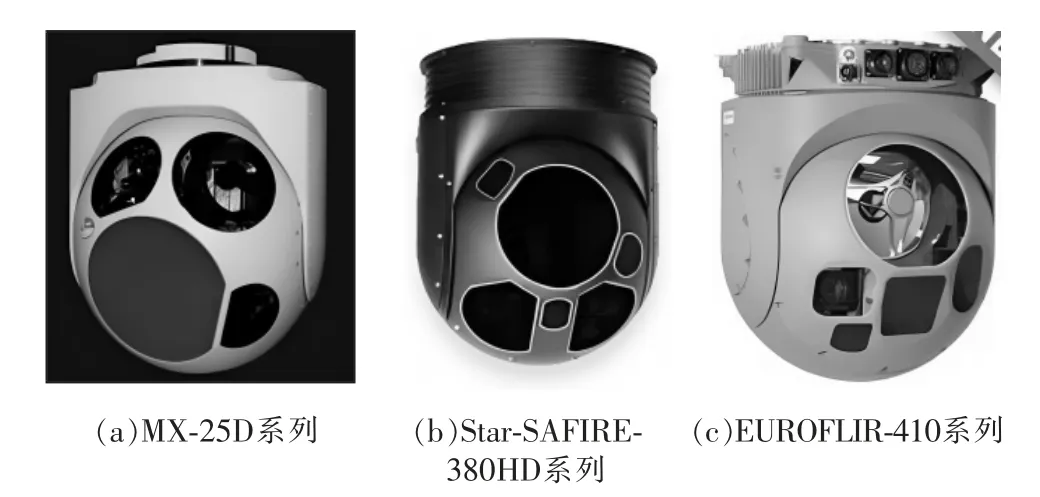
图3 不同类型的光电侦察吊舱Fig.3 Different types of photoelectric reconnaissance pods
二级稳定技术是在框架一级稳定的基础上采用快速反射镜对载荷视轴入射端的扰动进行补偿,进一步提高视轴的稳定精度。基于快速反射镜的二级稳定光电吊舱具有结构简单、有效载荷空间大、视轴稳定精度高等优点,在近十年的时间内发展迅猛。目前,国外已有成熟产品并运用在军事侦察中。美国雷神公司生产的MTS-B 和MTS-C 系列吊舱在两轴两框架光电吊舱上采用基于快速反射镜的二级稳定技术,使其视轴稳定精度达到10 μrad 以内。可以实现高分辨率目标捕捉和处理,具有瞄准、侦察和标记等多种功能,并可以在飞行中探测、跟踪和识别各种目标。美国Lockheed-Martin 公司设计生产的电光火控系统(electro-optical targeting system,EOTS)系列吊舱,采用2 个摆镜代替传统框架的俯仰轴和方位轴,光线经摆镜进入快速反射镜,通过快速反射镜进行二级视轴稳定控制。此外,EOTS 系列吊舱外形不同于传统吊舱,整个吊舱镶嵌在机体内部,采用经特殊加工的蓝宝石玻璃窗口作为吊舱的透镜,使吊舱具有隐身特性,且能保证在自身隐身效果的前提下检测周围的雷达信号。图4 所示为MTS 系列光电吊舱和EOTS 系列光电吊舱[12]。

图4 基于快速反射镜的光电侦察吊舱Fig.4 Photoelectric reconnaissance pod based on fast steering mirror
2.2 国内发展现状
与国外相比,国内的光电吊舱技术研发起步较晚,但随着国力的不断增强和科研人员的不断投入,我国在光电吊舱领域的研发水平也取得了阶段性的成就。截止2022 年,我国的光电吊舱需求总量超过3000 台,市场规模超30 亿元。随着规模的扩大,国内基于框架的一级稳定光电吊舱产品日趋成熟,航天科工威海公司设计生产的P60 系列吊舱,重量约为38 kg,稳定精度优于50 μrad,该光电吊舱可实现4 倍光学变焦,最大探测距离为8 km,广泛应用于无人机、飞艇、固定翼和直升机等载体上。星网宇达公司设计生产的SCC2000 系列光电吊舱,重量约为45 kg,稳定精度小于50 μrad,目前已广泛应用于国内外无人机市场。洛阳凯迈测控公司设计生产的PLY-11 系列光电吊舱,重量约为35 kg,稳定精度优于40 μrad,具有稳定精度高、光学性能优良、低重量设计、数据传输稳定等优点。图5 所示为PLY-11 系列光电吊舱示意图。此外,中航无人系统公司、南通华瑞航空光电仪器股份有限公司、中科院长春光机所、中科院西安光电所、航天九院十三所[13]都已经具备研制和生产重量低于35 kg,稳定精度优于30 μrad 光电吊舱的能力。

图5 PLY-11 型光电吊舱Fig.5 PLY-11 photoelectric pod
国内基于快速反射镜的二级稳定技术研发处于样机研究或小规模研制阶段,国内还未见成熟的应用产品。中科院长春光机所从上个世纪九十年代开始对快速反射镜在光电吊舱领域的应用展开研究,于1994 年成功研制出快速反射镜装置并将其应用于大型精密跟瞄光学系统中;1997 年,中科院西安光机所成功研制基于快速反射镜的二级稳定机载光电侦察平台样机。近年来,中电十一所将快反镜应用于红外相机中,实现“步进-凝视”功能;中科院长春光机所设计出基于快速反射镜的二级稳定控制样机,并与传统的框架稳定产品进行实验比对,试验结果表明,二级稳定控制样机的稳定精度相较于一级稳定提升了近9 倍。
3 国内外主要差距
机载光电吊舱作为一种高效的侦察、跟踪设备,装备于世界各国的先进军队中。相较于美国、以色列、加拿大等军事强国,我国在此领域的研究起步较晚,与国外先进设备存在一定的差距。主要体现在以下3 个方面:
(1)光电吊舱的视轴稳定精度
国外基于框架的一级稳定光电吊舱,稳定精度最高可达5 μrad,而国内最高为20 μrad。稳定精度相差3 倍以上[14]。低稳定精度会对吊舱载荷在远距离成像时产生严重影响。
(2)快速反射镜在光电吊舱中的应用
国外已有基于快速反射镜的二级稳定光电吊舱产品,例如美国雷神公司研制的MTS 系列机载光电吊舱、美国Lockheed-Martin 公司生产的EOTS光电吊舱等。而国内基于快速反射镜的二级稳定光电吊舱产品尚处于样机研发阶段,相关技术差距较大。
(3)载荷的光学性能
载荷的光学性能很大程度上决定了光电吊舱的成像质量。国外光电吊舱的载荷对目标的识别距离超过了20 km,国内仅为8 km 左右,相差2.5 倍以上。国外吊舱的可见光焦距观测值最大超过1000 mm,且可实现8 mm~1000 mm 连续变焦,国内可见光焦距观测最大值小于500 mm,变焦范围为20 mm~500 mm。
4 结语
未来军事作战将以信息化、网络化为核心,实现“地、海、空、天”一体化作战。作为情报收集任务节点的机载光电侦察吊舱,要求具备“远程观察、高清晰度、精确瞄准”的作战特征,同时不能影响载机的武器运载能力。因此,机载光电侦察吊舱正朝着“远程、精准、智能、轻便”方向不断发展。近年来,国内吊舱产品发展迅速,但相较国外产品仍有差距,需从以下3 个方面进行改进和升级,提升国内光电吊舱竞争力[15]:①提升产品可靠性及性能,当前产品存在稳定精度不高、产品性能不稳定、机械谐振明显等问题,针对此类问题,需开展专项研究,力争早日突破关键技术,提升产品性能指标,增强产品竞争力;②加速吊舱技术迭代升级,当前产品技术仍为第三代吊舱技术,为把握产品研发重点、抢占有利市场,需加速吊舱技术的迭代升级,尽快开展第四、第五代吊舱技术的项目预研,在开展项目预研的同时,还要着力培养项目团队,为后续吊舱产品提供技术支持和保障;③科研生产团队的科学管理,在科研生产过程中,应遵循“定义明确、准备充分、管理严格、遵守规范、改进不断”的原则,即明确团队任务,充分准备资源,落实责任追究,避免重复工作,及时沟通和改进,以此提升团队效率,进而提升产品竞争力,形成良性循环。
