基于TwinCAT3控制系统的YB518型小盒透明纸包装机运行速度的控制分析
2023-03-20韩彬
韩彬

关键词:YB518;状态变量;运行速度;驱动器
0引言
TwinCAT3是基于TwinCAT2、Windows控制和自动化技术发展而来的自动化软件,其是控制系统的核心部分。TwinCAT3将所有开发组件集成到微软的Visual Studio框架中,支持多种编程语言。本文的装置主要使用PLC語言进行编程和控制。
基于ZB48型卷烟包装机组的辅机小盒透明纸包装机YB518,又称为M750,通过TwinCAT3控制系统中的PB061 SETPOINTS程序段,实现对YB518运行速度的合理控制。其中既考虑YB518机器本身的传感器检测以及运行状态条件的影响,也结合上游机和下游机的运行状态对速度进行匹配。
1控制硬件
ZB48型卷烟包装机组中YB518型小盒透明纸包装机的主电机伺服控制系统采用德国伦茨公司(Lenze)的E94ASHE0244型伺服驱动器。如图1所示,模拟电压控制信号通过德国倍福公司(Beckhoff)的EL4002输出模块的#1、#3脚位与A17.1驱动器端子Jumper X3的#A1+、#A1-脚位连接,从而驱动主电机M17.1三相异步交流电机。该电机以速度作为控制对象,通过使用此驱动器来控制,调速性能好、调速范围广,易于平滑调节,起动、制动转矩大,易于快速起动、停车和控制。
2控制方式
PB061 SETPOINTS程序段中共有28条子程序段在28 ms内进行遍历循环处理。通过对机器自身传感器、运行状态、上游机和下游机的状态条件分别进行相关变量赋值,归纳YB518型包装机烟包输送的3种状态变量,将速度点位变量与模式进行匹配,综合判断运行速度变量SETP UPM,最终将速度变量转化为模拟电压变量AW160并输出。
2.1烟包输送的状态变量
当机器处于自动模式时,只要传感器B8.2持续感应烟包IOO ms,则满足最小烟包需求,变量BACK UP MINMIN=1。当传感器B8.1和B8.2都持续感应烟包100 ms,则满足基本烟包需求,变量BACK UP MIN=1。当传感器B8.0、B8.1和B8.2均持续感应烟包50 ms且变量E UP M PHOTO_MAX INHIB=0时,此时与上游机连接的烟包传送通道中的储备烟包满足YB518型包装机高速运行的需求,变量BACK UP MAX=1,或者自启动BACKUP MAX=1。其中,变量E UP M PHOTO MAXINHIB为上游烟包存储器YF64(M741)的烟包输出状态变量。
如果发生以下任意一种情况,则YB518型包装机烟包输送状态变量BELT N2=0:紧急或定位停机;程序停机;传感器B8.1未感应到烟包;传感器B8.2未感应到烟包;点动模式;空转模式;传感器B10.0未感应到烟包且E UP M PHOTOMAX INHIB=1,或者STOP EMPTYING=0,或者机器不超速状态变量DISABLE OVERSPEED=1;YB518型包装机运行速度V750=0。否则,当机器处于自动运行状态并且烟包较多,即BACK UPMAX=1时,BELT N2=1。
如果发生以下任意一种情况,则烟包输送状态变量BELT NI=0:紧急或定位停机;程序停机;点动模式;空转模式。否则,当BELTⅣ2=0时,如果在自动模式下AUTO=1且AUTO START=1且V750≠0,则BELT N1=1。
如果同时满足BACK UP MINMIN=1、BACKUP MIN=1、BELT NI=0、BELT N2=0,则烟包输送状态变量BELT NI=1,此时机器处于较平稳的运行状态。
2.2速度点位变量与模式的匹配
当BELTNI=1且满足相应条件时,点位变量SETPOINTI=1,设备运行速度对应数据单元DB60,即人机界面“750速度设定值”栏里“速度N1,存储器”的设定值。
当BELT N2=1且满足相应条件时,点位变量SETPOINT 2=1,设备运行速度对应数据单元DB60,即人机界面“750速度设定值”栏里“速度N2,存储器”的设定值。
在点动模式下,点位变量SETPOINT 3=1,设备点动运行速度对应数据单元DB60,即人机界面“750速度设定值”栏里“点动750”的设定值。
当透明纸发生拼接时,
点位变量SETPOINT 4=1,设备运行速度对应数据单元DB60,即人机界面“750速度设定值”栏里“薄膜拼接”的设定值。
当下游机YB618(M778)处于点动模式或者程序判定条盒提升通道内的条盒未满时,参考变量E DOWN M INCHING对应下游机YB618即M778程序中的变量A UP M INCHING,点位变量SETPOINT 6=1,设备运行速度对应数据单元DB60[35],即人机界面“750速度设定值”栏里“点动778”的设定值。
在空转模式下,点位变量SETPOINT 9=1,设备空转运行速度对应数据单元DB60,即人机界面“750速度设定值”栏里“机器空转”的设定值。
当点位变量SETPOINT1=1且主机YB418的运行速度V700>100r/min时,点位变量SETPOINT15=1,作为与上游机速度匹配的参考变量。
当点位变量SETPOINT 2=1且主机YB418的运行速度V700>100r/min时,点位变量SETPOINT16=1,作为与上游机速度匹配的参考变量。
将速度点位变量SETPOINT1~SETPOINT 16通过功能块F BIT WORD组成一个字,然后通过功能块S FB61 SETPOINT- V2000与人机界面中的数据单元DB对应的速度设定值进行匹配并触发变量SETP VISU,则数值匹配成功。
通过FB 1 OF 3功能块对速度设定值变量SETP进行赋值,共分为3种情况:①如果SETPOINT 1~SETPOINT 16中存在变量值为1,那么该速度点位变量对应的人机界面里的速度设定值将被赋予变量SETP;②在发生程序停机时,速度设定值变量SETP=30;③在发生程序停机时,并且机器相位CAM 3上升沿被触发后,速度设定值变量SETP=20。
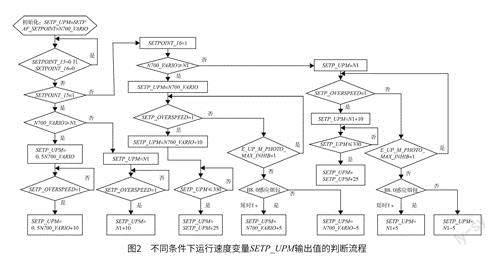
2.3运行速度变量SETP UPM的判断
不同条件下运行速度变量SETP UPM输出值的判断流程如图2所示。功能块FX CELLOSPEED可计算不同条件下运行速度变量SETP UPM的输出值,图2中“N1”为M750人机界面中“速度N1,存储器”的设定值,“10”为程序中赋予增速变量OVER SPEED的常数值,其他变量为程序段PB061 SETPOINGTS中对应各个小段中的输出变量。当程序段中不同的SETPOINGTX(1、2、3、4、6、9)成立时,将人机界面中对应的速度设定值赋予变量SETP UPM,再根据主电机转速计算公式得出YB518的轉速V750。
当SETPOINGT 15=1或SETPOINT16=1时,根据图2的各个条件和程序中上游机YB418型包装机运行速度的适配变量N700 VAR10的输出值(根据程序判定为V700或0.75)进行判断,得出运行速度变量SETP UPM的输出值,最后决定YB518的转速V750。
2.4模拟电压变量的输出
利用功能块S FB SETPOINT ADAPTION并结合上文运算得到的运行速度变量SETP UPM和其他限制条件进行综合处理,可得到运行速度模拟电压变量AW160。该变量通过电柜中总线端子排A90.3的模拟量输出模块EL4002输出模拟电压(0~10V)至YB518主电机驱动器A17.1的端子X3的#AI+、#A1-脚位,最终实现对YB518主电机运行速度的合理控制。由式(1)计算得到YB518主电机(M750)运行转速。
3结论
根据机器实际情况,当传感器B8.1、B8.2持续感应到烟包时,机器以N1速度启动;满足超速条件时,根据图2中的流程判断并决定机器运行速度。当传感器B8.0持续感应烟包且B10.0结合其他条件没有使机器降速时,机器以N2速度运行;当满足超速条件时,根据图2中的流程判断决定运行速度。当烟包输送通道传感器感应不到烟包或者上游机相关变量不满足条件时,经过程序判断后会控制机器进行降速直到重新满足条件,否则当传感器B8.1感应不到烟包时,机器最终停机。