高斯光束圆孔衍射光强分布的解析解
2024-02-29隋林泓武燕玲李瑞芳李喜彬
麻 欢,付 柯,隋林泓,武燕玲,李瑞芳,李喜彬
(内蒙古师范大学 物理与电子信息学院,内蒙古 呼和浩特 010022)
光束的传输特征,尤其是光束的衍射聚焦特征,仍是目前光学研究中的一个重要课题. 在实际工作中,高斯光束是最常见的光源,且光束传输常常受到光阑的限制,因此在光学工程领域,关于光阑对高斯光束的衍射效应的研究就变得尤为重要[1]. 例如在光刻技术中,需要通过增加聚焦光学系统的焦深来增强蚀刻效果,因此高斯光束衍射的详细解析结果对于设计长焦深光刻光学系统具有一定的指导意义. 目前,对于完全透光情况的圆孔衍射问题已经有了充分的研究,利用数值方法对高斯光束衍射问题的研究同样已经非常充分[2-4],但对于高斯光束圆孔衍射在焦点附近的光强分布目前还没有获得较为精确的解析解. 此外,高斯光束衍射光强分布的解析计算对于衍射理论的后续研究同样有着一定借鉴意义.
为得到高斯光束衍射的三维光强分布,本文参考文献[5]中对圆孔衍射的解析计算方法,利用了菲涅耳-基尔霍夫衍射积分公式,对模型的具体计算过程加以适当扩展,并结合贝塞耳函数(Bessel function)、洛默尔函数(Lommel function)等特殊函数的具体性质,得到了焦点附近光强分布的解析结果. 利用数值方法分析了高斯光束束腰半径对艾里斑半径、焦深、光强在艾里斑内的集中程度等参量的影响.
1 衍射积分的计算
高斯光束的一个重要性质是光强在与传播方向垂直的横截面上呈高斯分布. 理想情况下高斯光束的发散角非常小,且束腰位于衍射圆孔平面内,因此正入射情况下高斯光束在圆孔光阑平面上的振幅为[1,6]
(1)
其中σ为高斯光束的束腰半径(通常在腰束半径的定义式中,指数的分母上不会出现因子2,这里是为了后文中公式的表达方便,并不会影响相关结论的合理性).

(2)
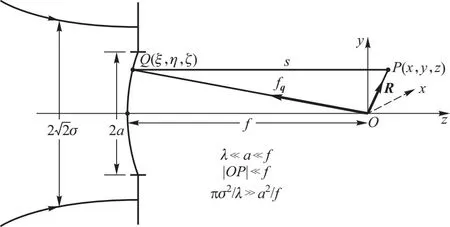
图1 圆孔上的衍射示意图
式(2)中,k=2π/λ为波矢大小,σ为高斯光束的束腰半径,并用到了小发散角近似条件zR=πσ2/λ>>a2/f,zR表示瑞利距离. 由菲涅耳-基尔霍夫衍射积分公式得到P点的光强为[5]
(3)

为计算积分式(3),引入极坐标
(4)
其中0≤ρ≤1,在波阵面W上,坐标ζ还可以近似表示为
(5)
进而
(6)
现定义新的无量纲变量:

(7)
同时将立体角积分元转换为面积分元,即
(8)
于是积分式(3)变为
(9)
无量纲变量b的含义为高斯光束向中心的集中程度,即当入射光为匀强的光束时,满足σ→∞,即b→0;反之当一束无宽度的线光束通过光阑时,满足σ→0,即b→∞.
利用贝塞耳函数的定义式:

(10)
积分(9)变为关于贝塞耳函数的积分形式:
(11)
对于|w/v|≤1的情况,由贝塞耳函数关系式:

(12)
式(11)中的积分可以表示为
F(u,v)≡
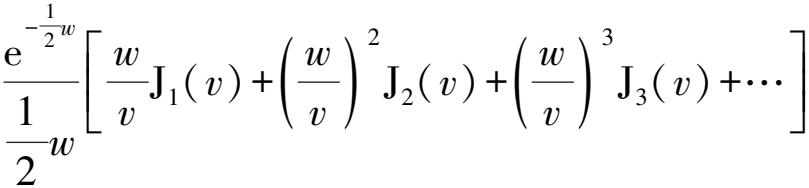
(13)
式(13)中w的定义见式(7),并定义了双变量洛默尔函数(Lommel function of two variables,以下简称洛默尔函数).
(14)
同时利用极限
(15)

(16)
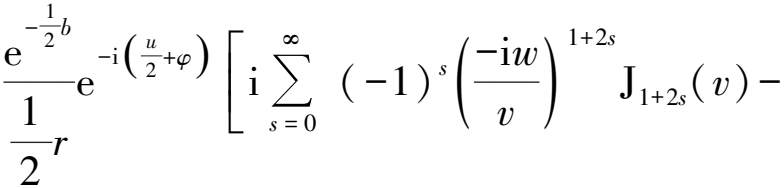
对于|w/v|≥1的情况,则利用关系式
(17)
以及贝塞耳函数极限关系:
(18)
得到式(11)中的积分:
(19)
2 光强分布
根据式(16)和(19),焦点附近的光强表示为
I(u,v)=|U(u,v)|2=I0|F(u,v)|2
(20)
上式中I0=|U0|2表示匀强光场通过圆孔光阑后在焦点处的衍射光强,其中
(21)
为匀强光场(σ→∞或b→0)在焦点处的衍射振幅,其中A0含义与前文相同. 但是由于w为复数,无法得到式(16)和(19)实部和虚部的解析表达式. 利用数值方法,可以得到a/σ=0、0.51/4、1、21/4时焦点附近的相对光强分布I(u,v)/I0,如图2所示. 图2(a)中距离焦点O最近的等高线的幅值为0.9,而图2(b)—2(d)中距离焦点最近的等照度线的幅值分别为0.7、0.6以及0.5,可见b越大,中心相对光强越弱,但整体光强分布的轮廓并未改变,只不过极值处的强度有所差异.
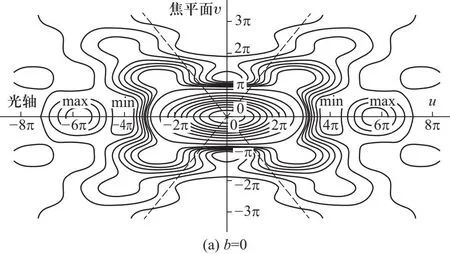
图2 不同b值下高斯光束圆孔衍射在焦点附近的等照度线,即I(u,v)/I0的等高线. 虚线代表几何阴影区域的边界. 图中max表示光强的极大,min表示光强的极小.
下面将详细分析几个特殊位置的光强分布.
2.1 几何焦平面上的光强分布
如果P点位于几何焦平面上时,即u=0,此时满足φ=0,w=b,于是式(16)为
(22)
在平面波入射情况下
(23)
那么焦平面上的光强沿径向的分布为
(24)
式(24)也称为艾里公式[5],与匀强光场在衍射焦平面上的表达式一致.
对于b≠0的情况,焦点处的振幅为
(25)
则焦点处的光强为
(26)
显然
(27)
图3给出了不同b情况下焦平面上径向的光强分布. 不过从图中不容易看出艾里斑半径r0(光强分布I(0,v)的第一个零点)与b之间的关系,表1中列出了艾里斑半径r0随b的数值结果. 可见b越大(高斯光束光强分布越向光轴集中),艾里斑半径也越大.

表1 艾里斑半径r0随b变化的数值结果
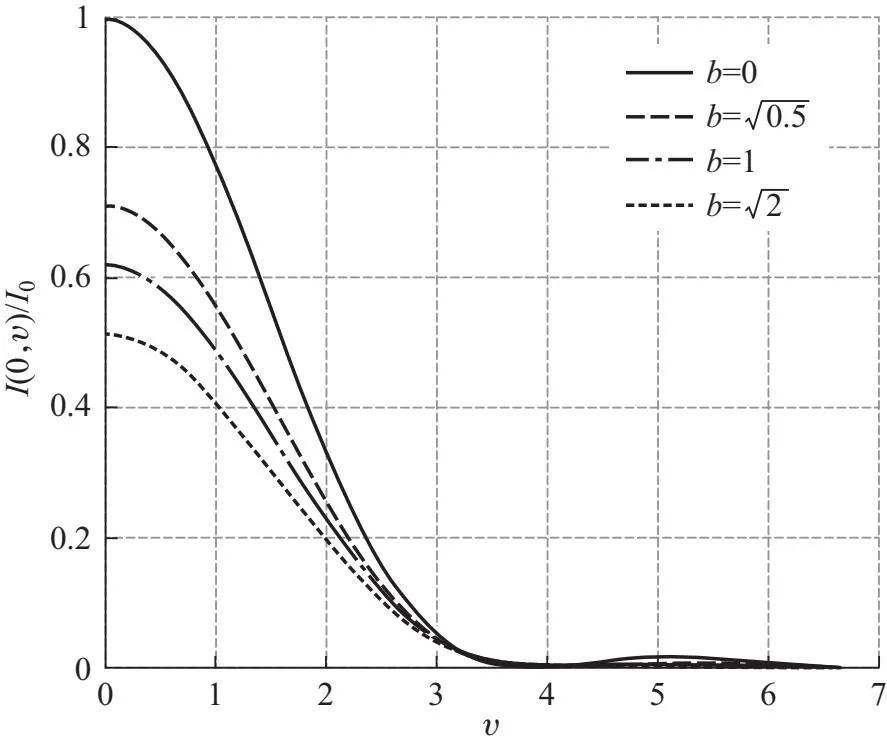
图3 几何焦平面上光强分布关于坐标v的变化曲线,4条曲线依次对应时的情况.
2.2 光轴上的光强分布
观察点P位于光轴上时,此时v=0,洛默尔函数简化为V0(u,0)=1,V1(u,0)=0. 于是
(28)
对于平面波入射的情况(b=0),此时
(29)
上式与匀强光场在光轴上的衍射光强分布一致[5].回到式(28),只有当b=0时才会出现光强零点,即u=4nπ,n=1,2,3,…. 当b>0时,显然有I(u,0)>0. 图4给出了不同b取值情况下光轴上的光强分布. 可以发现,参数b的增大对焦点处的相对光强改变较为明显,但并未改变光强分布的整体轮廓.
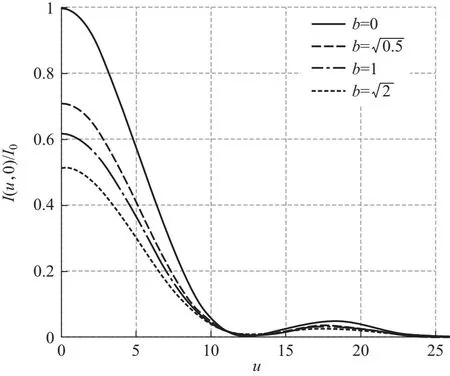
图4 光轴上光强分布关于坐标u的变化曲线,4条曲线依次对应时的情况.
与光轴上光强分布有关的一个重要的参量为焦深,表示光轴上坐标u0处的图像仍保持一定的清晰度,这里仍采用文献[6]中的结论,将焦深u0定义为该点处的光强相较于焦点处衰减了20%. 表2中的数值结果表明,焦深u0与b之间的关系近似为一条二次曲线,最佳拟合结果为

表2 焦深u0随b变化的数值结果
u0=0.021 4b2+0.000 2b+3.236 0
(30)
2.3 几何阴影边界上的光强分布
式(16)与(19)收敛的共同分界为|v|=|w|,其物理含义为衍射阴影区与照明区的分界线,定义几何阴影区域边界为|v|=|w|,即
v2=b2+u2
(31)
可见在焦平面上及附近的几何阴影区域边界依赖光束形状,而在远离焦平面处,光束形状对阴影区域边界无影响,而且整体轮廓与高斯光束一致,这里无量纲参数b具有与高斯光束中的束腰相类似的含义.
将条件|v|=|w|=r带入到式(16)中,得到
U(u,r)=
(32)
再将上式带入到光强公式(20)中,则
(33)
对于b=0,几何阴影边界上的光强分布为[5]
(34)
图5为不同b值条件下几何阴影边界上的光强分布.
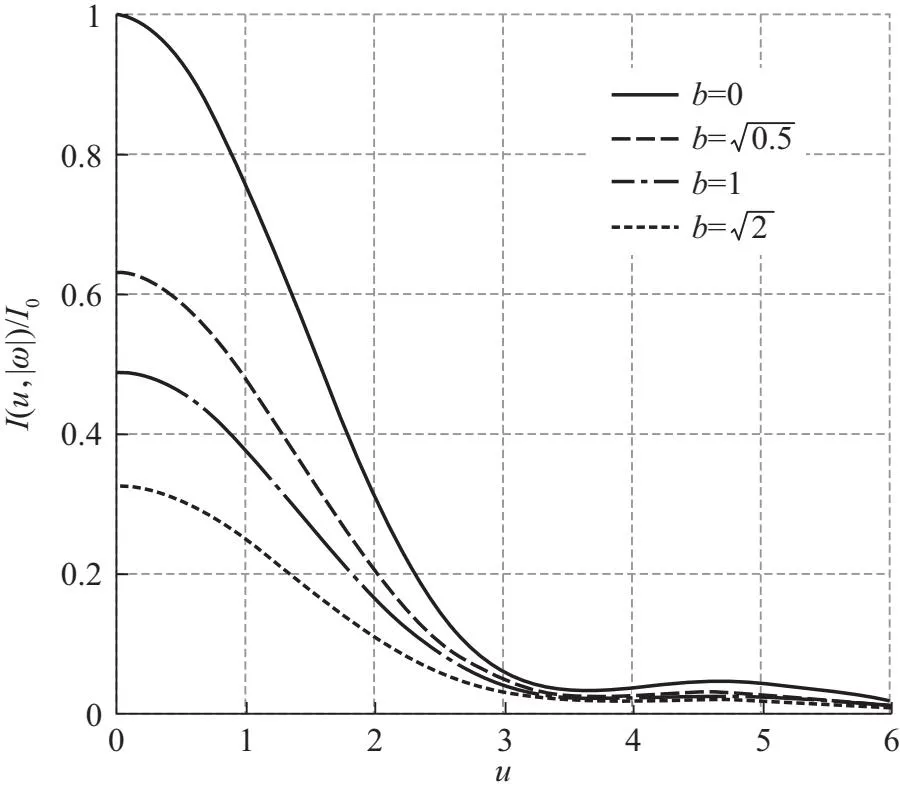
图5 几何阴影区域边界上光强分布关于坐标u的变化曲线,4条曲线依次对应时的情况.
2.4 焦平面上的积分强度
定义参考光强
(35)
其含义是高斯光束在单位时间内通过光阑的总能量. 假设在焦平面上(u=0),以焦点为中心、给定的r为半径做一圆形区域,则在该圆形区域内能量占光强总能量的百分比为
(36)
式中
(37)
将式(13)带入到式(36),于是
[Jm(v0)Jn(v0)+Jm-1(v0)Jn-1(v0)]
(38)
上式中的第三步用到了积分[7]:
(39)
以及贝塞耳函数的性质J0(0)=1和Jn(0)=0(n=1,2,3,…). 重新定义上式中的指标,令k=m+n,于是
(40)
其中
(41)
当b=0时,当且仅当m=n=1的级数项非零,即
(42)
此即瑞利公式[5].
图6为b取不同值时焦平面上的积分光强分布,可见b越大,能量越向中心集中. 此外,研究艾里斑内的能量百分比L(r0)更有助于直观说明上述结论. 表3中列出了L(r0) 随b的变化关系,进一步验证了b越大,能量越向中心集中这一结论.

表3 艾里斑内积分光强L(r0)随b变化的数值结果
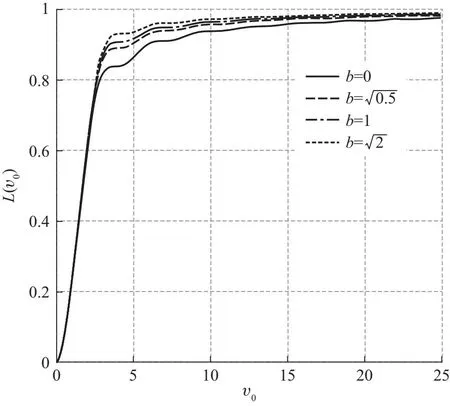
图6 焦平面上给定小圆内接收到的能量百分比
4 总结
本文从菲涅尔-基尔霍夫公式出发,得到了高斯光束圆孔衍射焦点附近光强分布的解析表达形式,并通过洛默尔函数表示. 之后选取了三个特殊区域(几何焦平面、光轴以及几何阴影区域边界),给出了这些区域上光强分布的解析表达式,并得到了光强分布的数值结果. 数值结果表明,参数b越大,艾里斑半径越大,同时焦深也越大. 最后分析了焦平面上的光强积分强度. 根据以上的解析以及数值结果,发现高斯光束束腰半径的大小并不会改变衍射光强分布的整体轮廓,但较小的束腰半径会使得光强分布向焦点处集中.
本文中的方法及结论不仅对高斯光束衍射理论的研究有着一定指导意义,而且对研究生的傅里叶光学课程的教学同样起到了补充的作用.
最后感谢审稿人、编辑对本文耐心细致地审阅以及对本文提出的宝贵意见.