基于3U 型辅助线圈的无线充电系统定位与方向引导方法∗
2024-01-26曹桂梅李海啸
杨 奕,曹桂梅,李海啸
(重庆理工大学电气与电子工程学院,重庆 400054)
为助力实现“双碳”目标,新能源电动汽车受到了世界各国的大力推广。电动汽车充电方式主要包括有线充电和无线充电,但有线充电方式因其固有的插拔式操作容易产生火花而造成安全隐患,且难以适应雨雪等恶劣天气[1]。而无线充电方式以其特有的能量转换形式和安全性高、便捷灵活、环境适应性强等优点,可用于室内外停车场以及特定路面充电等实际应用场景。在国内外相关研究机构及企业的努力下,天际ME7、奔驰GLE、北汽EV200、捷途X70s、奥迪AI、沃尔沃XC40 等无线充电车型已得到了广大消费者的认可。
然而,在电动汽车无线充电系统中,若电动车偏离有效充电区域会极大地限制其充电能效性,目前相关研究人员从改进线圈结构[2-4]、改变补偿网络[5-7]、优化控制策略[8-9]等方面进行了大量研究,来改善磁耦合机构的抗偏移能力[10],但在实际应用中耦合机构的偏移容忍度提升是有限的,针对该问题,标准J2964 提到将位置检测与泊车过程相结合[11]的定位技术以保证车辆实现有效充电。
为实现电动车定位以提升无线充电效率,现有文献主要采用了三种方式:增设通信设备、结合WPT 系统自身特性、采用定位辅助线圈。
在增设通信设备方面,现有文献通过增设摄像头、RFID、铁氧体计数器等实现位置检测。文献[12]基于摄像头设备,将地标信息与预测地图信息进行匹配实现位置识别,但该方法对识别区域内障碍物的敏感性低。为提升位置检测精度,文献[13]将射频识别技术引入到无线充电系统以实现可靠、稳定的线圈定位,但该方法标签易磨损、成本高。考虑到功率线圈大多配置相应铁氧体以提升耦合性能,KAIST 提出在一次侧增设铁氧体位置计数器的方法,针对含有铁氧体磁芯的二次侧线圈进行位置识别[14],然而该方法受限于接收线圈的铁氧体空间分布。可见通过增设通信设备或添加传感器定位的方法,提高了系统的整体运营成本。
在结合WPT 系统自身特性实现定位方面,为避免额外增设检测传感器导致系统复杂化,文献[15]通过测量发射线圈和接收线圈之间的耦合系数实现发射端线圈位置检测,但该方法仅能使电动车移动至直径20 cm~30 cm 内的近完美耦合区域,且仅适用于发射线圈与接收线圈为圆形线圈的情况。另外,西南交通大学研究团队[16]考虑到采用的数据拟合方式仍具备不确定性,在发射线圈与接收线圈均为圆形线圈的基础上,通过推导互感与线圈位置之间的数学解析关系,提出了基于互感参数的线圈自定位方法,定位精度可达1 mm。该定位方法精确度很高,但受限于线圈结构,适用性有待提高。
可见,通过增设传感器以及结合系统自身特性实现定位均受限于无线充电系统的实际应用场合。因此,采用定位辅助线圈实现车辆位置识别的定位方式受到了国内外相关研究人员的广泛关注。
在采用定位辅助线圈方面,现有研究主要在改造发射线圈或接收线圈的基础上结合相应定位算法以实现位置检测。文献[17]采用四个圆形辅助线圈对称分布于方形接收线圈外围,利用电磁平衡原理,采集两组对称线圈的差分电压并结合参数拟合进行定位,该定位方法精度可达1 厘米,但需要二次改造车载接收线圈。针对车载系统安装辅助定位线圈使得体积繁杂这一问题,文献[18]将四个半径极小的圆形线圈对称内嵌于圆形接收线圈内部构成辅助机构实现定位,但因其辅助线圈尺寸限制,使得定位高度受限。为解决位置识别范围的问题,文献[19]提出将八个感应线圈分成四组分别缠绕在接收线圈侧面的无线充电定位系统,结合相应算法实现定位,但发射线圈面积约为接收线圈三倍,且需要二次改造接收线圈的结构。综上,目前引入辅助线圈的定位方式大多需要在现有车载线圈结构上进行二次改造且无法满足各类车型的定位高度需求,这给电动车定位的实际应用带来一定难度。
综上,本文从利用现有车载系统逆变器和接收线圈实现位置检测为出发点,研制一种垂向磁场较强且不影响功率线圈工作的定位辅助线圈,并提出相应方向引导及位置检测方法以修正停车点。相较于其他定位方法,该辅助线圈及其定位方式具有以下优点:无需二次改造车载系统;满足不同车型的定位高度需求;适应多种典型磁耦合机构;不影响功率线圈工作。
1 基于3U 型定位辅助线圈的WPT 系统
1.1 系统简介
无线电能传输系统主要由直流电源、逆变电路、补偿拓扑、发射线圈、接收线圈、整流滤波电路以及负载组成。从利用车载系统现有逆变电路及接收线圈出发,为适应现有典型磁耦合机构及不同底盘高度车型,设计U 型辅助线圈并置于发射线圈底部以避免影响主耦合机构能量传输过程。WPT 定位系统整体结构如图1 所示。定位时,以不同工作频率分别控制各个U 型线圈工作,并实时采集相应负载电压作为定位信号,当发射线圈与接收线圈发生偏移时,三个U 型线圈与接收线圈之间的耦合程度各不相同,通过对各输出电压值进行特征轨迹识别来实现位置检测。

图1 基于3U 型定位辅助线圈的WPT 系统
3U 型定位辅助磁耦合机构如图2 所示,在不改变功率接收线圈基础上,设计辅助线圈以U 型结构呈等边三角形分布于发射线圈底端,在不影响发射端线圈工作基础上实现位置检测功能,其中U1 线圈到辅助结构原点的距离为110 mm。

图2 3U 型辅助机构介入下的磁耦合机构
1.2 数学模型分析
图3 为基于3U 型辅助线圈并采用LCC-S 谐振网络的WPT 定位系统电路图。其中,Q1-Q4为全桥逆变电路的开关管,D1-D4为桥式整流电路的二极管,LT-LU3为主线圈(TC、RC)和定位辅助线圈(U1、U2、U3)的自感,Lt-L3和CT-CU3分别为发射线圈和辅助线圈的谐振电感和谐振电容,MT1-MTR为磁耦合机构中对应两个线圈之间的互感。为避免交叉耦合影响以及有效识别多个辅助线圈的具体工作状态,采取频率控制方法对该辅助线圈进行控制,三个U 型线圈的开关频率设置为94.5 kHz、95.5 kHz、96 kHz,耦合频率设置为95 kHz。

图3 WPT 定位系统电路结构
采用基波分析法对系统电路进行数学建模[20-21],相应的电路谐振条件为:
在定位状态下,以U1 线圈工作为例,U2、U3、TC 不工作,即I2、I3、It为0,如图4 所示。

图4 系统等效电路图
在不考虑补偿电感Lt、L1、L2、L3交叉耦合的条件下,结合补偿条件(1),由基尔霍夫定律可知相关回路电流为:
考虑到整流电路和滤波电容CO的影响,接收端的等效电阻为:
结合式(2)、式(3)可知,当不同U 型线圈单独工作时,负载两端电压和互感MRi为:
在线圈固有参数、补偿电感以及输入电压确定的情况下,负载端输出电流、输出电压与互感呈正比关系。
假设接收线圈为NR匝,每匝由M点组成,任一点可表示为Pn-m(Xn-m,Yn-m,Zn-m)(n=1,2,…,NR且m=1,2,…,M)。因U 型辅助线圈属于密绕螺线管线圈,所以每匝线圈可近似为闭合圆形电流,因此空间内Pn-m点处的磁感应强度可等效为NU匝圆载流线圈在该点各自激发的磁感应强度的叠加[22],图5 为磁感应强度示意图。

图5 磁感应强度计算简化图
为简化计算,以每匝U 型线圈中点建立子坐标xjyjzj(j=1,2,…,NU),结合三维空间坐标系在旋转与平移情况下的变换规律,得到xjyjzj空间内的Pn-m点位置(xn-m-j,yn-m-j,zn-m-j)。即:
式中:e表示相应的单位向量。根据毕奥-萨伐尔定律,得到单匝圆形线圈在Pn-m点磁感应强度的轴向分布Bz分别为[22]:
式中:A=R2+d2-2Rdcosθn-m-j且θ=β-α。
NU匝螺线管线圈情况下Pn-m点磁感应强度的轴向分布为:
得到相应NU匝螺线管线圈(U1、U2、U3)与NR匝接收线圈(RC)的磁通链ψiR为:
结合式(5)~式(9)可知,U 型线圈与接收线圈之间的互感与两者的相对位置有关,即在两者相对位置发生变化的偏移情况下,对应的互感也会发生变化。同时由于三个U 型线圈的结构特征,使得在某一接收线圈偏移情况下,三个U 型线圈分别与接收线圈之间的互感均不同。
2 3U 型定位辅助线圈的适用性分析
将定位辅助线圈引入至现有典型磁耦合机构中以分析其磁耦合器适应性。因该线圈的分布特点,MR1、MR2、MR3总体呈120°旋转对称变化,以下仅通过分析MR1的变化规律来说明其适用性。
2.1 辅助结构应用于方形-方形磁耦合机构
当发射线圈与接收线圈均为方形线圈(SC)时,不同传输距离d对应的MR1(SC-SC)变化如图6 所示。可见,不同距离d对应的MR1(SC-SC)总体平面变化规律一致,且MR1(SC-SC)随d增大而减小,另外在X1O1Y1平面的任意象限内,MR1(SC-SC)随着X轴的偏移逐渐减小且在X轴上各点的互感可近似为0、随着Y轴的偏移先增大后减小。当发射线圈与接收线圈正对齐时,接收线圈结构中心位于辅助线圈中心,接收线圈与三个U 型线圈几乎无耦合现象,即MR1(SC-SC)=MR2(SC-SC)=MR3(SC-SC)≈0。当发射线圈与接收线圈发生偏移时,接收线圈与三个U 型线圈的互感各不相同,即MR1(SC-SC)≠MR2(SC-SC)≠MR3(SC-SC)。

图6 不同偏移情况下的MR1(RC-RC)变化规律
2.2 辅助结构应用于DD 型-DD 型磁耦合机构
当发射线圈与接收线圈均为DD 型线圈时,辅助线圈与接收线圈之间的互感变化如图7 所示。可见MR1(DD-DD)在不同距离d下的变化趋势一致,且随d增大而减小。在X1O1Y1平面的任意象限内,MR1(DD-DD)随ΔX的偏移逐渐减小,随ΔY的偏移先减小再略增大,最小点为U 型线圈结构终点。发射线圈与接收线圈正对齐时相应互感为MR1(DD-DD)≈MR2(DD-DD)=MR3(DD-DD)。发射线圈与接收线圈发生偏移时,接收线圈与三个U 型线圈的互感各不相同,即MR1(DD-DD)≈MR2(DD-DD)≠MR3(DD-DD)。

图7 不同偏移情况下的MR1(DD-DD)变化规律
由以上分析可知,当3U 型辅助结构介入到以上典型磁耦合机构时,各U 型线圈与对应接收线圈的互感随两者相对位置变化而变化,即使在d=250 mm时,互感变化也较为明显。因此该辅助结构完全适用于方形、DD 型线圈组成的多种磁耦合系统,且满足大部分车型对定位高度严苛的要求。
3 基于等值互感特征轨迹的定位与方向引导方法
3.1 典型耦合结构下的等值互感特征轨迹分析
若接收线圈发生位置偏移,则接收线圈与各个U 型线圈之间的互感也会相应变化,进而导致相应U 型线圈单独工作下的负载电压改变。当功率线圈均为方形线圈时,以U1 线圈单独工作为例,结合图6 所示的MR1(SC-SC)变化规律可知,在传输距离Δz一定时,若测得确定的负载电压UO1,此时该负载电压对应唯一的互感MR1(SC-SC),而MR1(SC-SC)对应无数种接收线圈与U1 线圈的偏移情形。这些偏移情形可概括为接收线圈的结构中心向辅助结构平面的投影点位于(X-a)2+(Y-|b|)2=R2的圆上,其中a=110 mm,b=160 mm,R与MR1(SC-SC)相关。图8 为方形接收线圈下的等值互感特征轨迹示意图。

图8 方形接收线圈下的等值互感特征轨迹示意图
类似地,当接收线圈为DD 型线圈时,结合MR1(DD-DD)变化可知,在传输距离Δz一定时,若测得确定的负载电压UO1,此时该负载电压对应无数种接收线圈与U1 线圈的偏移情形。这些偏移情形可概括为接收线圈的结构中心向辅助结构平面的投影点位于(X-110 mm)2/a2+Y2/b2=1(a>b>0)的椭圆上,其中a、b与MR1(DD-DD)相关。图9 为方形接收线圈下的等值互感特征轨迹示意图。

图9 DD 型接收线圈下的等值互感特征轨迹示意图
3.2 典型耦合结构下的定位与方向引导方法
根据负载电压UO1和以U1 线圈为基准的等值互感特征轨迹的特定关系,当接收线圈发生偏移时,三个U 型线圈单独工作时的负载电压将对应三个不同的互感轨迹(A、B、C),且接收线圈当前位置的唯一性也决定了对应互感轨迹A、B 和C 将具有唯一交点。因此,基于所提出的3U 型辅助机构的接收线圈位置检测与方向引导功能主要通过估计可能点和判断确定点来实现。
当接收线圈为方形时,其位置检测和方向引导示意如图10 所示,功能实现包括五个过程。①接收线圈初始位置区间判断:当接收线圈进入U2 线圈或U3 线圈的可识别区域时,MCU 实时采集相应负载电压并将其与数据库信息进行比对检索得到相应互感轨迹。此时如果互感轨迹B、C 无交点,则表示接收线圈仅处于其中一个U 型线圈的可识别区域,若UO2>0,则当前接收线圈处于XOY平面第二象限,引导轨迹指向-Y轴;反之若UO3>0,则接收线圈处于XOY平面第三象限,引导轨迹指向+Y轴。②可能位置点估计:如果互感轨迹B、C 存在两个交点,则可推导出两个可能的当前位置点(x1,y1)和(x2,y2)。③引导轨迹初步生成:初步根据离中心点更远的可能位置点生成引导轨迹引导接收线圈移动。④确定点判定和确切的引导轨迹生成:移动接收线圈直到检测到UO1≠0,此时接收线圈进入可识别范围,并根据互感轨迹A、B、C 的唯一交点即可确定接收线圈当前位置(x,y),同时得到确切的引导轨迹。⑤进入有效充电区域:重复上述步骤,直到满足最佳充电条件(UO1≈UO2≈UO3≈0)。
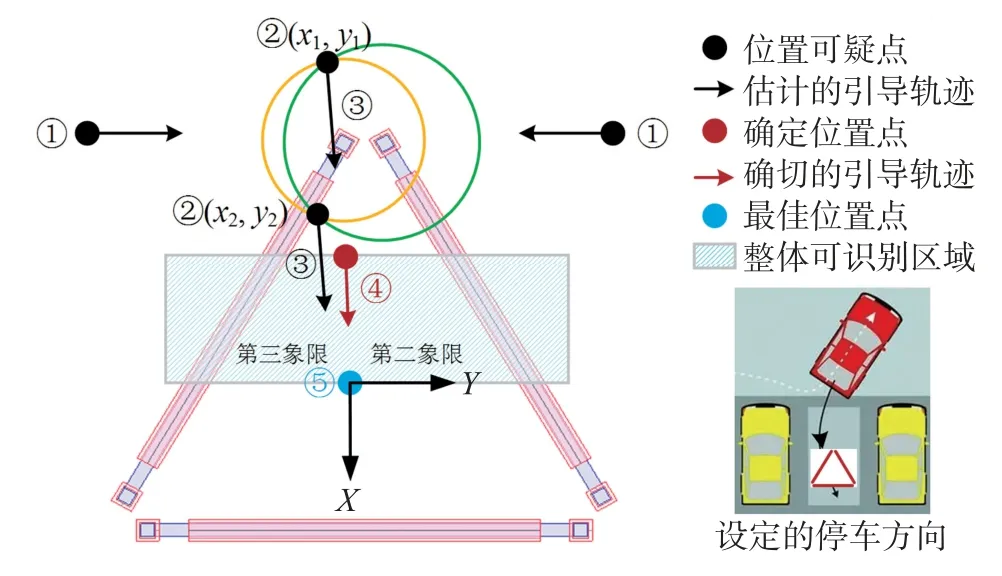
图10 方形接收线圈下的修正方向引导示意图
类似的,当接收线圈为DD 型时,其位置检测和方向引导示意如图11 所示,功能实现可细化为四个过程。①接收线圈初始位置区间判断:通过负载电压UO2和UO3得到相应互感轨迹B 和C,在B、C 无交点基础上若UO2>0,则当前接收线圈处于XOY平面第二象限,引导轨迹指向-Y轴;若UO3>0,则当前接收线圈处于XOY平面第三象限,引导轨迹指向+Y轴。②可能位置点估计:如果互感轨迹B、C 存在两个交点,则可推导出两个可能的当前位置点(x1,y1)和(x2,y2)。③确定点判定和确切的引导轨迹生成:结合MR1(DD-DD)变化规律和预先设定的停车方向,若互感轨迹B、C 交于两点,必然存在一个或两个交点处于U1 线圈的可检测范围,此时根据负载电压UO1即可确定接收线圈实际位置,进而生成确切的引导轨迹。④进入有效充电区域:重复上述步骤,直到满足(UO1≈UO2≈UO3≠0)。

图11 DD 型接收线圈下的修正方向引导示意图
结合上述分析可知,当所提3U 型辅助线圈介入到接收线圈为方形或DD 型的磁耦合结构时,其相应的接收线圈定位与方向引导流程如图12 所示。

图12 定位与方向引导流程图
4 实验验证
为验证所提3U 型辅助结构的宽范围位置检测与方向引导功能的实际效果,根据表1 给出的磁耦合机构参数,并结合LCC-S 补偿电路的参数配置方法搭建图13 所示的实验样机。
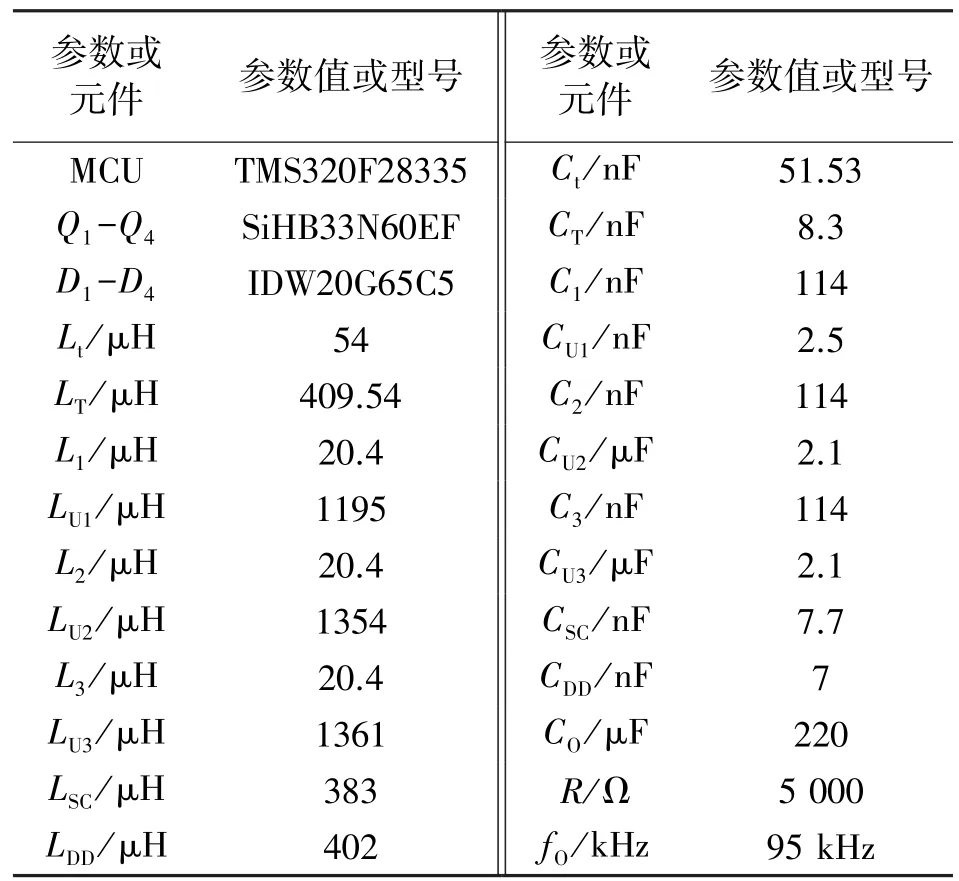
表1 样机主要参数及元件型号

图13 实验样机
在接收线圈分别为方形、DD 型线圈的条件下,依次测取对应的U 型线圈与接收线圈之间的互感和各个U 型线圈单独工作下的负载电压,以验证所提3U 型辅助结构的位置检测与方向引导可行性。
4.1 3U 型辅助结构的偏移敏感与定位可行性验证
为验证3U 型辅助结构的偏移敏感性,以X=±200 mm和Y=±200 mm 为边界,50 mm 作为步进长度,测取了传输距离d分别为120 mm 和250 mm 时U1 线圈分别与方形、DD 型接收线圈之间的互感MR1(SC-SC)、MR1(DD-DD),测量结果如图 14 所示。图14(a)中MR1(SC-SC)随Y变化呈现出“波峰-波谷-波峰”的变化规律,随X变化呈现先增大后减小且在X轴上始终为零的规律。图14(b)中MR1(DD-DD)随X、Y变化均呈现出先增大后减小的规律。同时,MR1(SC-SC)和MR1(DD-DD)在同一传输距离d条件下相邻测量点之间的互感变化明显。可见,测量值与仿真基本吻合,验证了3U 型辅助结构的偏移敏感性。

图14 不同传输距离下MR1(SC-SC)和MR1(DD-DD)的测量结果
为验证3U 型辅助结构的定位可行性,在与上述相同步进长度及边界条件下,测取了不同传输距离d条件下三个U 型线圈分别工作下的负载电压。当接收线圈为方形时,测量结果如图15 所示。可见,当d=120 mm 时UO1、UO2、UO3的实验测量值与仿真的平均相对误差为3.38%、4.77%、4.55%。当d=250 mm时平均相对误差为9.38%、8.77%、9.55%。其中,当接收线圈中点处于X轴时输出电压为0 且当其处于U型线圈端点时负载电压达到最大。同时,在功率线圈正对齐时负载电压满足UO1=UO2=UO3=0,当两者发生水平偏移时有UO1≠UO2≠UO3。且随着传输距离增加,各负载电压随之减小,这使得靠近正对齐位置的范围中各负载电压可能为0,即该辅助结构的整体可识别范围将随传输距离增大而逐渐减小。但当d≤250 mm 时,经方向引导后若检测到UO1=UO2=UO3=0,则系统判定发射与接收线圈为正对齐情况,此时接收线圈仍然处于有效充电区域。

图15 接收线圈为方形线圈时不同传输距离d 下UO1、UO2、UO3的测量结果
当接收线圈为DD 型且传输距离分别为150 mm和250 mm 时,各负载电压的测量结果如图16所示。当d=150 mm 时UO1、UO2、UO3的实验测量值与仿真的平均相对误差为4.12%、3.76%、4.05%,当d=250 mm 时平均相对误差为8.75%、9.21%、9.66%。同时,当发射线圈与接收线圈正对齐时各负载电压满足UO1≈UO2≈UO3≠0,当两者发生水平偏移时则满足UO1≠UO2≠UO3。另外,随着传输距离增加,各负载电压随之减小,使得该辅助结构的整体可识别范围减小,但d≤250 mm 时的有效充电区域仍可被有效识别。

图16 接收线圈为DD 型线圈时不同传输距离d 下UO1、UO2、UO3的测量结果
测量结果与仿真基本符合,证实了发射线圈与接收线圈发生相对位置偏移与三个负载电压之间的对应关系。基于单个U 型线圈的可识别范围,当接收线圈为方形时,传输距离d=120 mm 对应的整体可识别范围约为300 mm×400 mm,当d=250 mm 时可通过方向引导将接收线圈修正到国际标准规定的偏移容忍度范围内的有效充电区域。当接收线圈为DD 型时,传输距离d=150 mm 对应的整体可识别范围约为400 mm×300 mm,当d=250 mm 时仍可通过方向引导将接收线圈修正到有效充电区域。
方形、DD 型接收线圈位于XOY平面内第二象限的位置检测结果如图17 所示。
定位结果与实际位置基本一致,互感变化明显的特定范围内定位精度较高,而随着偏移位置的变化,特别是在U 型线圈与接收线圈互感较低的偏移位置下,定位精度有所下降,但仍保持在10 mm 内。
4.2 基于3U 型辅助结构的接收线圈方向引导验证
为实现系统有效充电,在接收线圈位置检测基础上提出方向引导功能。在传输距离d=120 mm 且接收线圈为方形线圈的条件下,分析了三种典型情况的接收线圈初始位置以验证方向引导可靠性,对应接收线圈的方向引导和步进位置如图18 所示。

图18 方形接收线圈下的位置引导示意图
将接收线圈置于XOY平面第二象限任意位置,在初始位置测得三个U 型线圈分别工作下的负载电压UO1=0 V,UO2=14.5 V,UO3=11 V,将其与数据库信息进行比对,检索到相应互感轨迹B 和C。结合所提出的定位方法推导出接收线圈的两个可疑位置点为(x1=- 200 mm,y1=50 mm) 和(x2=-190 mm,y2=30 mm)。由于这两个可疑位置点均处于3U 型辅助结构整体可识别范围外,此时初步根据距原点更远的可疑点(x1,y1)生成引导轨迹以修正接收线圈位置。另外,若接收线圈实际位置处于可疑点(x2,y2),在修正过程中,该位置也会在相同方向移动相同距离直到满足可识别条件(UO1≠0 V),此时接收线圈进入整体可识别范围,在实际测试中测得UO1=0.2 V,UO2=12.8 V,UO3=12.4 V,从而判断出接收线圈当前位置(x=-150 mm,y=20 mm),在此基础上得到确切的方向引导轨迹。进而重复定位与方向引导步骤直到满足有效充电条件(UO1=UO2=UO3=0 V)。
类似地,将接收线圈置于XOY平面第三象限任意位置时,初始负载电压为UO1=0 V,UO2=12.86 V,UO3=13 V,此时推导两个可疑位置点为(x1=-220 mm,y1=-80 mm) 与(x2=-160 mm,y2=-20 mm),并根据(x2,y2)定义方向引导轨迹,当检测到UO1≠0 V 时得到UO1=0.18 V,UO2=10.11 V,UO3=11.3 V,从而推断出当前实际位置(x=-128 mm,y=-27 mm),进而修正引导轨迹,直至接收线圈与发射线圈正对准。若将接收线圈置于XOY平面-X轴:初始负载电压为UO1=0 V,UO2=13.47 V,UO3=13.5 V,此时推导两个可疑位置为(x1=-210 mm,y1=0 mm)与(x2=-180 mm,y2=0 mm),根据(x1,y1)定义引导轨迹。当测得UO1≠0 V 时,根据当前负载电压UO1=0 V,UO2=12.51 V,UO3=12.6 V 推断出的当前所在位置(x=-145 mm,y=0 mm)修正引导轨迹,直至接收线圈与发射线圈正对准。
当d=150 mm 且接收线圈为DD 型线圈时,三种典型情况下的接收线圈方向引导和步进位置如图19所示。

图19 DD 型接收线圈下的位置引导示意图
将接收线圈置于XOY平面第二象限任意位置,测得初始电压为UO1=0 V,UO2=5.3 V,UO3=2.13 V,经数据库检索后发现互感轨迹B、C 有两个交点,即接收线圈可疑位置点为(x1=- 150 mm,y1=200 mm)与(x2=150 mm,y2=80 mm),结合设定的停车方向以及接收线圈为DD 型时的整体可识别范围可知,当前位置点为(x1,y1),因为(x2,y2)所对应的偏移位置下负载电压UO1≠0 V。此时根据(x1,y1)生成引导轨迹直到满足有效充电条件(VO1≈VO2≈VO3≈4.1 V)。类似地,将接收线圈置于XOY平面第三象限任意位置时,测得初始电压UO1=0 V,UO2=2.41 V,UO3=5.32 V,进而得到当前位置点(x1=-200 mm,y1=-200 mm)和可疑位置点(x2=150 mm,y2=-75 mm)。将接收线圈置于-X轴任意位置时,初始电压UO1=0 V,UO2=2.41 V,UO3=5.32 V,进而推导出当前位置(x1=-200 mm,y1=0 mm)和可疑位置(x2=420 mm,y2=0 mm)。
当接收线圈分别为方形和DD 型时,处于接收线圈位置检测与方向引导过程的驾驶辅助显示界面如图20 所示。
表2 对所提3U 型辅助结构与现有典型辅助线圈结构[18,23]进行了比较。可见,所提3U 型辅助结构在不改造接收线圈基础上兼具定位距离高、耦合机构适应性强和不影响发射线圈工作等优点,为推动电动车无线充电定位技术产业化提供了可靠性。

表2 所提辅助线圈结构与现有辅助线圈结构的比较
5 结论
利用车载系统固有的逆变器和接收线圈,提出一种用于电动汽车无线充电系统的3U 型辅助结构及其接收线圈定位与方向引导方法。结合不同车型充电高度需求及磁耦合机构多样性,设计辅助结构呈3U 型等边分布以适应现实定位需求,并分析在该结构介入下典型磁耦合机构的磁场特性,并基于功率线圈相对位置、互感和负载电压之间的特定关系提出相应接收线圈定位与方向引导方法。搭建WPT 系统实验装置以验证所提方法可行性。在特定传输距离下,该结构定位精度能达到10 mm,且当接收线圈为方形时,辅助结构整体可识别范围可达300 mm×400 mm,而当接收线圈为DD 型时,可识别范围可达400 mm×300 mm,可满足实际定位需求。相比于现有利用辅助线圈实现接收线圈定位的方式,所提出的线圈结构及其定位方法具有以下优点:不改造车载接收线圈结构、适应多种磁耦合机构、适应底盘高度在标准规定范围内的不同车型、不影响发射线圈工作。
