面向肠道平滑肌的微弱肌张力测试系统设计∗
2024-01-26倪伟杰郭旭东
倪伟杰,郭旭东∗,陈 杰
(1.上海理工大学健康科学与工程学院,上海 200093;2.上海交通大学医学院附属新华医院小儿外科,上海 200092)
功能性胃肠病(Functional Gastrointestinal Disorder,FGIDs),作为一种因胃肠道功能紊乱引起的慢性或者是反复发作性的消化科常见疾病,由于FGIDs 的病因和发病机制尚未明确,因此目前治疗功能性胃肠病的手段主要是改善饮食习惯以及心理辅助治疗[1-2],这种治疗方法经常出现时间不久后病情反复和直接作用时收效甚微等后果,治标不治本。真正要从根本治疗功能性胃肠病,必须要明确它的发病机制。研究认为肠动力异常与肠道功能紊乱有着密切关系[3],肠动力异常最直观表现在肠道器官平滑肌肌张力异常上,所以准确检测人体肠道器官平滑肌肌张力,实时对比正常人肠道器官平滑肌肌张力与功能性胃肠病患者肠道器官平滑肌肌张力,能够为阐明功能性胃肠病的内在机理提供巨大帮助,可为临床上改善患者的预后、实现精准医疗目标提供依据。
市场上的肌张力测试系统根据测试对象的不同,可以分为运动肌张力测试系统和静息肌张力测试系统。
运动肌张力测试系统的主要测量目标是人体骨骼肌肌肉肌张力突变时产生的生理信号,当肌肉收缩(抽搐、痉挛)时,肌肉的形状随之改变,导致皮肤表层的起伏,这种起伏直接作用在压力传感器上,根据压力传感器输出信号的大小,可以直观地观察肌张力的大小[4]。运动肌张力测试系统只能测量运动过程中肌张力的大小,当肌肉处于静止状态时,肌张力大小就无法被测量到,并且运动肌张力测试系统往往需要依附在人体表面进行测量,显然不适用于人体肠道器官平滑肌肌张力的测量。
静息肌张力测试系统的主要测量目标是人体内器官肌条肌张力的大小,在测量肌条肌张力大小时,需要先将肌条静置15 min,利用肌条自主收缩产生的拉力进行测量。因为肌条所产生的肌张力不比骨骼肌,所以静息肌张力测试系统不像运动肌张力测试系统一样可以采用直接测量的方式,需要将肌条肌张力进行放大后才能进行测量,又因为肌条本身尺寸很小,如何有效固定肌条,保证每次测量时肌张力的方向一致,也是静息肌张力测试系统需要克服的难题之一。综上所述,与运动肌张力测试系统相比,静息肌张力测试系统的量程更小、精度更高、测试环境更苛刻,也更适合用来测量人体肠道器官平滑肌肌张力。
为了研究肠动力异常导致的功能性胃肠病的发病机制,需要以平滑肌肌条自发收缩运动的肌肉张力变化为测量指标,现有的测试系统均采用离线测量方式[5-6]。然而,临床的肌张力测试设备主要用于运动肌张力的无创实时测量,通过对肌张力测量数据特征参数的提取,实现患者肌张力异常程度的评价,为康复训练效果的量化评估提供参考依据。但尚无专用于平滑肌张力测试和电生理测试的静息肌张力测试仪器,现有的通用生物信号记录仪,传感器的测量量程、灵敏度、分辨率、精度难以与被测的平滑肌的肌张力参数完全匹配。因此,需要设计针对肠道平滑肌的高精度肌张力测试系统,一方面在肠动力异常发病机制研究中,采用模型小鼠获取离体全部结肠,进行离体肠动力检测,分析各种药物或者不同干预对平滑肌自发性收缩的影响,获得生理和病理状态下的肠道功能变化,验证平滑肌肌张力异常与肠道功能紊乱的必然联系;另一方面,通过术中获取人体肠道平滑肌的标本,进行离体肠动力检测。为了提高现有测试系统的测量精度,基于多级杠杆放大原理和差分式霍尔传感原理开发了微弱肌张力测试系统。
1 系统总体设计
系统选用微处理器进行控制,并选择自适应肌条夹持装置固定肌条,防止平滑肌肌条的抖动和偏移影响最终测量结果。因为平滑肌肌张力大小只有mN 级别,测量电路回路内噪声会对测量装置的输出信号产生严重干扰,需要有肌张力放大装置放大肌张力再进行测量,在对各方案进行权衡后,选择多级杠杆的结构实现力的放大,同时杠杆支点处选用柔性铰链的形式传递压力,使得装置一体化程度提高,简化装置结构。在UG 软件中建立杠杆模型并施加压力载荷进行有限元分析,计算出杠杆放大倍数。利用霍尔式力传感器来测量经多级杠杆放大后的力,通过特殊的转换元件,通过霍尔元件测量磁场强度的方式来测量力的大小。信号处理模块由多级电路组成,目的是去除高频噪声信号、50 Hz 工频干扰信号、放大有效电压信号,保证测试系统输出稳定。系统总设计图如图1 所示。

图1 系统总体结构框图
2 系统主要模块设计
2.1 肌张力放大装置设计
2.1.1 多级杠杆结构设计
将多个单级杠杆串联,形成更大的力放大倍数,整体杠杆的放大倍数是各子杠杆放大倍数的乘积,根据多级杠杆放大原理与平行杠杆叠加原理[7],可以设计出带有较大放大倍数且稳定的杠杆结构,如图2 所示。

图2 多级杠杆结构设计
多级杠杆放大倍数k为:
式中:L1,L3,L5分别为杠杆的长臂端,表示被放大力的一端,L2,L4,L6分别为杠杆的短臂端,表示输出的一端。杠杆间通过柔性结构连接,实现力的传递及放大功能。L1=90 mm,L2=10 mm,L3=50 mm,L4=10 mm,L5=20 mm,L6=10 mm,代入到式(1)计算,理论上杠杆系统的放大倍数可以达到180 倍。
2.1.2 柔性铰链设计
柔性铰链是一种一体化结构铰链,也经过一体化加工方式来实现,由于结构一体化,柔性铰链的体积非常小且与杠杆本身相连无需固定,已经在微传动领域有着广泛的运用。与传统铰链相同,柔性铰链的作用在于传递力和运动,依靠构件间的几何约束与构件之间的相对形式运动,在构件末端得到相对位移。即利用薄弱部分产生弹性形变,经过几代工程师的研究,为了更高的精度和柔性,柔性铰链钻孔形状最优为椭圆形[8]。椭圆形柔性铰链平面结构如图3 所示。

图3 椭圆形柔性铰链
椭圆形柔性铰链转动刚度J的计算公式如下:
式中:E为柔性铰链材料弹性模量,b为柔性铰链厚度,ay为椭圆形钻孔纵轴长度,ax为椭圆形钻孔横轴长度,f3为转动系数。
在本系统中,柔性铰链设计为12 mm×4 mm×5 mm规模六面体,中心钻孔最薄处设计为0.1 mm,及t=0.1 mm,b=5 mm,ay=1.95 mm。
2.2 基于霍尔效应的差分式力传感器设计
基于霍尔效应的力传感器具有响应速度快[9]、灵敏度高、体积小、集成度高等优点,为了实现mN级平滑肌肌张力的精密测量,在平滑肌肌张力经肌张力放大装置放大后,拟采用基于霍尔效应的差分式力传感器测量放大后的力。针对霍尔式力传感器的输出性质及工作原理,设计了相应的转换方案和转换元件。
2.2.1 转换原理的设计
霍尔传感器内霍尔元件的工作原理是检测磁场的变化,如何将力的变化转换为磁场的变化,是本次设计需要确定的关键技术之一。拟采用悬臂梁结构,即:将力的变化转换为弹簧片形变,再转换为磁场源与霍尔传感器距离的变化,最后转换为霍尔式力传感器的磁感应强度的变化这一设计思路。
2.2.2 转换元件的结构设计
对要素转换实现方案的设计,将所要测得的力通过悬臂梁结构挂在弹簧片上,实现力的大小变化转换为弹簧片的形变,将N45 钕铁硼打造的尺寸为10 mm×2.5 mm×1.2 mm 的矩形永磁体固定在弹簧片上,弹簧片为厚度为0.6 mm 的铍铜板,形成悬臂梁结构,实现弹簧片的形变转换为霍尔元件与永磁体距离的变化,即霍尔元件感应到的磁感应强度的变化,输出与磁感应强度成正比的电压信号,根据元件各部位摆放需求,确定元件外部框架结构为U型[10],完成整个要素转换流程,根据设计思路设计出的转换元件结构如图4 所示。
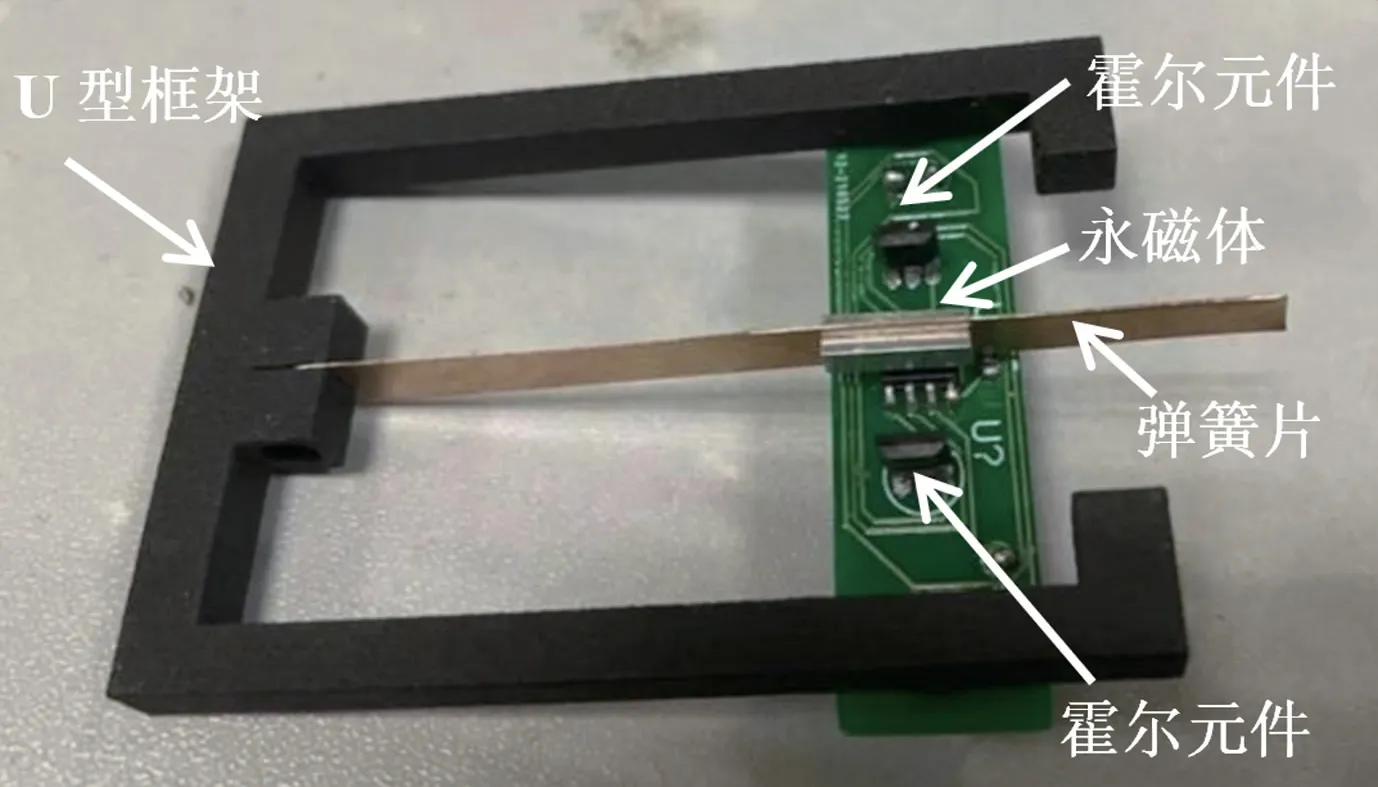
图4 转换元件结构图
2.3 信号处理模块设计
围绕霍尔元件输出的原始信号存在的问题,设计信号处理模块,霍尔元件输出电信号存在的两大问题,分别是电路内部存在失调电压以及输出信号掺杂噪声[11]。为了有效过滤出有效的霍尔元件输出信号,一般采用正交电流调制电路解决失调电压问题;用斩波滤波电路解决噪声问题。
正交电流调制电路是利用电桥电路整流功能周期性改变输入电流道路(改变电流相位),使得失调电压正向反向叠加,从而起到消除失调电压的效果[12]。失调电压去除后,霍尔元件输出偏平稳,但是信号的幅值仍处于毫伏级别,不便于后续的观察和处理,所以在后级电路中设计一个仪表放大器,放大倍数为1 000。
设计斩波滤波电路的目的是去除电路输出信号中的噪声,按照信号处理的顺序可以分为:①斩波电路将混合信号中的有效信号(霍尔元件输出的理想信号是直流电平)调制到高频段,再将高频信号与噪声信号叠加放大,经过解调阶段将高频段的有效信号转化到低频段,同时将噪声信号转化到高频段,实现信号的分离。②滤波电路为高阶低通滤波电路,目的是让低频的有效信号通过,滤去高频的噪声信号[13]。斩波电路可以有效地去除因传感器制造工艺引起的闪烁噪声,并且不增加电路繁琐度,电路自身所携带的热噪声也得到了有效的控制。
3 系统实验验证和结果分析
3.1 杠杆建模及有限元分析
使用NX10.0 软件对设计好的杠杆模型进行建模,柔性铰链设置为5×4×12 mm 规模六面体,中心钻孔最薄处设置为0.1 mm。保证输出力有效传递的同时,杠杆另一端设计了一体化材料的配重块,保证杠杆初始平衡,如图5 所示。

图5 杠杆建模模型
使用ANSYS 软件对杠杆模型进行网格划分,尽量保证选取硬度优秀的材料保证杠杆不易弯曲形变,提高杠杆工作性能,所以设定模型材料为钛合金(Titanium_Alloy),载荷力以向下拉力载荷的形式实现,在杠杆端点处设置向下拉力代替实际模型砝码产生的向下压力。
模型的约束条件类型为固定约束,在柔性铰链的一端设置固定约束模拟杠杆支撑点,将三个支撑点通过模型后方一根较粗的横梁连接(固定约束1),既为后续测量提供方便,又保证了固定约束在实际操作过程中的稳定性。输出力的测量方式以测量反作用力为准,在输出端放置固定约束2,通过反作用力测量输出力大小。具体固定约束放置如图6 所示。

图6 固定约束放置图
完成以上各项参数设置后,将输入载荷力设置为1 mN,可导出的输出量为:载荷点力、结构最大应变、柔性铰链应力、及输出力大小,求解当前模型。当输入载荷为1 mN,得到杠杆形变程度渲染图如图7 所示。
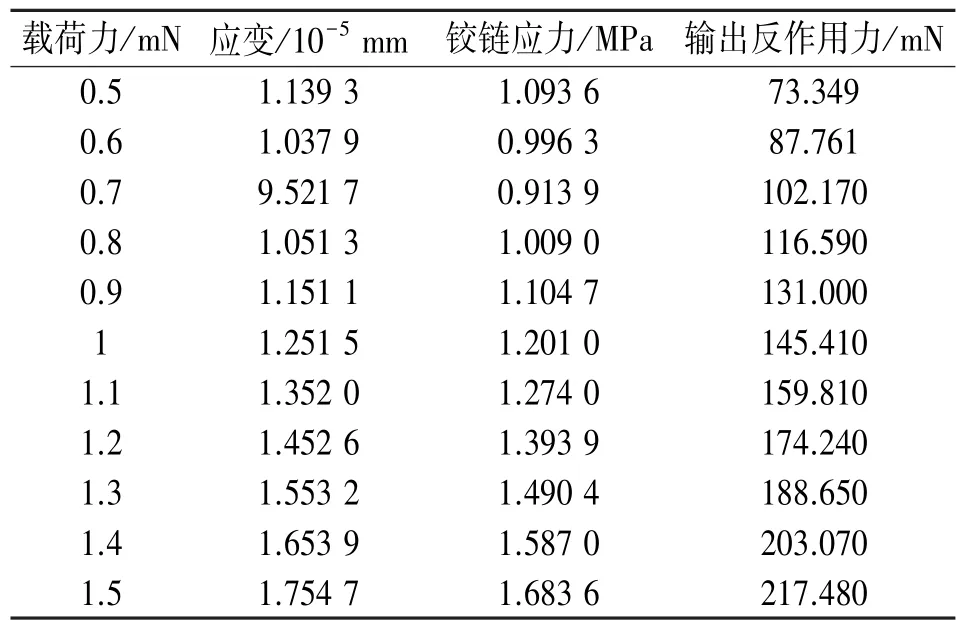
表1 多级杠杆输入输出的仿真结果

图7 杠杆有限元分析渲染图
根据有限元分析结果,当杠杆处于不受载荷力的初始情况下时,输入端力为0 mN,载荷点压力为0 MPa,柔性铰链最大应力为1.598 6 MPa,输出端力为1.78 mN。杠杆在初始状态下的平衡情况良好;当输入变化范围为0.5 mN~1.5 mN、变化步长为0.1 mN 的载荷力时,导出输出量:载荷点力、结构最大应变、柔性铰链最大应力、及输出端力大小,其中应变和柔性铰链最大应力用来检测杠杆和柔性铰链的受力情况是否超过材料承受极限,载荷点压力和输出端力可以直观观察杠杆输入输出间的关系,在输入端力不断增大的过程中,载荷点压力、结构最大应变、柔性铰链最大应力及输出端力大小都随之增大,在输入端力到达1.5 mN 时,应变量达到最大,为1.754 7 m,柔性铰链最大应力达到最大,为1.683 6 MPa,均未超过钛合金材料的承受极限。杠杆平均放大倍数为145,已实现肌张力的放大。
3.2 测试系统性能验证及分析
为了验证系统性能,选择F1 等级标准砝码产生0~0.15 gn标准力,选择0~0.15 gn量程的张力换能器作为实验对象,测试结果。如图8 所示,横坐标为砝码重量(gn),纵坐标为信号处理电路后的张力换能器输出信号(V),观察整体的输出曲线,如图8 所示。
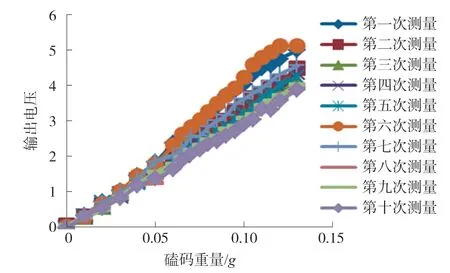
图8 信号处理模块输出测量曲线
测试系统的工作曲线如图9 所示。其性能参数如表2 所示。

表2 测试系统性能参数
可以观察到,经过信号处理模块处理,测试系统的输出具有零点漂移小、稳定性好、重复性高且灵敏度较好的特点。
4 小结
本文从胃肠道动力异常的特征信息出发,结合功能性性胃肠病的发病机制分析,设计了一种可用于测量平滑肌肌张力的测试系统,将肠道器官平滑肌肌张力大小转换为电信号输出,根据有限元分析结果给出肌张力放大装置放大倍数,经过系统测试验证给出测试系统性能参数表,验证了该测试系统用于测量肠道器官平滑肌肌张力的可行性,该系统为微弱的平滑肌肌张力测量提供测量精度,为探究功能性胃肠病和肠动力异常的内在联系提供了帮助。
