基于磁场传感器磁成像装置研究∗
2024-01-26赵晓锋陈子轩杜西亮
赵晓锋,陈子轩,杜西亮
(1.黑龙江大学电子工程学院,黑龙江 哈尔滨 150080;2.黑龙江省微纳敏感器件与系统重点实验室,黑龙江 哈尔滨 150080;3.重庆文理学院电子信息与电气工程学院,重庆 402160)
目前,用于磁场测量的装置或仪器在航空航天、工业、医疗等诸多领域广泛应用[1],被测磁场的测量范围一般在10-15T~103T[2-3]。较为成熟的磁场测量方法包括电磁效应法、霍尔元件阵列、磁阻元件阵列法和核磁共振法等[4-5],通过测量待测环境的磁场信息,可实现磁性材料的无损探测与分析[6-8]。
袁鑫安等[9]利用隧穿磁电阻(TMR)传感器阵列制作一种新型电流场检测系统,用于非接触检测管道裂纹,在不接触管道的情况下可直观有效地检测和估计管道上的裂纹。Lee 等[10]利用3×3霍尔传感器阵列制作的磁场测量系统可以快速地扫描一维磁场并绘制磁场分布图,准确地测量了单个磁体的位置和磁体周围的磁场分布。刘梦欣等[11]利用3个霍尔元件设计三维矢量磁场测量仪,由FPGA 完成方向角的计算,具有测量误差小、功能模块化等特点。近年来,磁场测量仪能够实现单点的磁场测量或者扫描一维磁场[12-13]。
本文采用磁场矢量传感器设计一种空间磁场测量装置,利用预设测量位置和对应的磁场矢量相结合,通过并行获取的磁场矢量实现待测磁场空间的磁成像,分析待测空间的磁场分布,为进一步研究待测磁性材料性质、待测空间磁性变化规律等奠定基础。
1 磁成像装置工作原理
1.1 磁成像装置基本结构
图1 给出磁成像装置基本结构,包括磁场矢量传感器、三维移动平台(安装传感器)和仪器箱等,在仪器箱中放置传感器信号处理电路、移动平台驱动电路和电源等。三维移动平台由铝合金框架、亚克力板载物台(放置待测样品)、行程定位开关和步进电机等组成,其中三组步进电机分别沿x轴、y轴和z轴方向控制三维移动平台运动。在待测磁场空间中,通过三维移动平台调整传感器的位置坐标(x,y,z),同时磁场矢量传感器可实时采集待测磁场空间中相应坐标位置的磁场分量(Bx、By和Bz),可实现磁场扫描式测量,由微控制器作为主控芯片完成三维移动平台的控制、磁场信息获取和数据处理。

图1 磁成像装置基本结构
本文选用实验室研制的霍尔元件,选择性能接近一致的3 只芯片,按照磁敏感方向垂直正交封装构成磁场矢量传感器,图2 给出封装后的传感器照片(其中插图为霍尔元件芯片照片),根据霍尔元件的工作原理[14],该传感器可以分别测量三维磁场分量(Bx、By和Bz),恒流源供电(I)时,理想情况下磁场矢量传感器三个磁敏感方向霍尔元件输出电压为:

图2 磁场矢量传感器示意图
式中:ρ为半导体电阻率,μn为电子迁移率,d为霍尔元件敏感层厚度,I为霍尔元件工作电流。
1.2 磁成像原理
如图3 所示,在空间中任意的磁感应强度B分解成磁场分量Bx、By和Bz[15],且满足:

图3 空间磁场矢量图
式中:α为B与Bz的夹角,β为B在xy面投影与Bx的夹角,
为实现空间磁场矢量测量和磁成像,设待测磁场空间中某位置处的参量包括被测量位置坐标信息(x,y,z)和待测磁场信息(Bx,By,Bz),通过Excel 文件的形式将上述参量保存至计算机中,其中坐标信息(x,y,z)为传感器在待测空间的坐标位置,可通过设置三维移动平台的步进距离和空间测量范围等参数调整传感器位置,利用软件进行数据获取、分析和预处理,并将上面6 个变量以矩阵的形式存储,将三维空间切割分成xi×yj×zk份。由传感器分别测量B的三个分量Bx、By和Bz,根据式(2)计算磁场矢量B与各个敏感轴的夹角α和β,以及磁场矢量的模|B|,可实现对应位置B的大小和方向的测量。通过对数据处理后的待测磁场空间坐标信息和磁场信息进行多项式插值处理,在待测空间的每一个待测位置处绘制对应的磁场矢量,最终绘制整个待测磁场空间的磁场矢量,形成空间磁场分布图。
2 磁成像装置设计
2.1 磁成像装置硬件电路设计
图4 为磁成像装置硬件电路设计框图,主要包括微控制器、三维移动平台驱动电路、磁场矢量传感器信号处理电路等。由微控制器控制三维移动平台使磁场传感器到达待测磁场空间的预设坐标位置,并将采集的磁场信息转换为输出电压(VHx、VHy和VHz),再经过信号放大电路、滤波电路和A/D 转换电路等信号处理,最终将采集的磁场信息和预设的位置信息传输给计算机,应用软件完成图像处理、图像分析、图像显示等功能,该装置供电电源为+12 V直流稳压电源。

图4 磁成像装置硬件电路设计框图
图5 为三维移动平台步进电机驱动电路框图,通过微控制器设置步进电机驱动器(TB6600)的脉冲数量和频率,以控制步进电机转动的角度和速度(即丝杠直线位移的大小和速度),采用T8 丝杆连接步进电机,将步进电机的角位移转换为丝杠的线位移,每个脉冲信号控制丝杠直线位移0.005 mm,可快速、准确调整传感器在待测磁场空间的预设位置。

图5 步进电机驱动电路框图
图6 为传感器的信号处理电路,可完成放大、滤波和调零等,采用仪表放大器(AD620)进行一级放大和滤波,利用运算放大器(OP07)进行调零和二次放大,U2作为调零电路,U3作为电压跟随器,U4作为二次放大电路,其中A/D 转换为微控制器内置。该装置通过仪表放大器将霍尔输出电压由双端输出电压调整为单端输出电压,可去除共模信号。仪表放大电路由外接电阻(RG0)调节放大器的增益,降低电路设计的复杂性,利用外接电容(CVS+、CVS-)作为去耦电容,减小仪表运放电源电压的波动,利用外接电容(CVH+和CVH-)作为滤波电容,滤除高频信号,增强霍尔输出电压的稳定性。
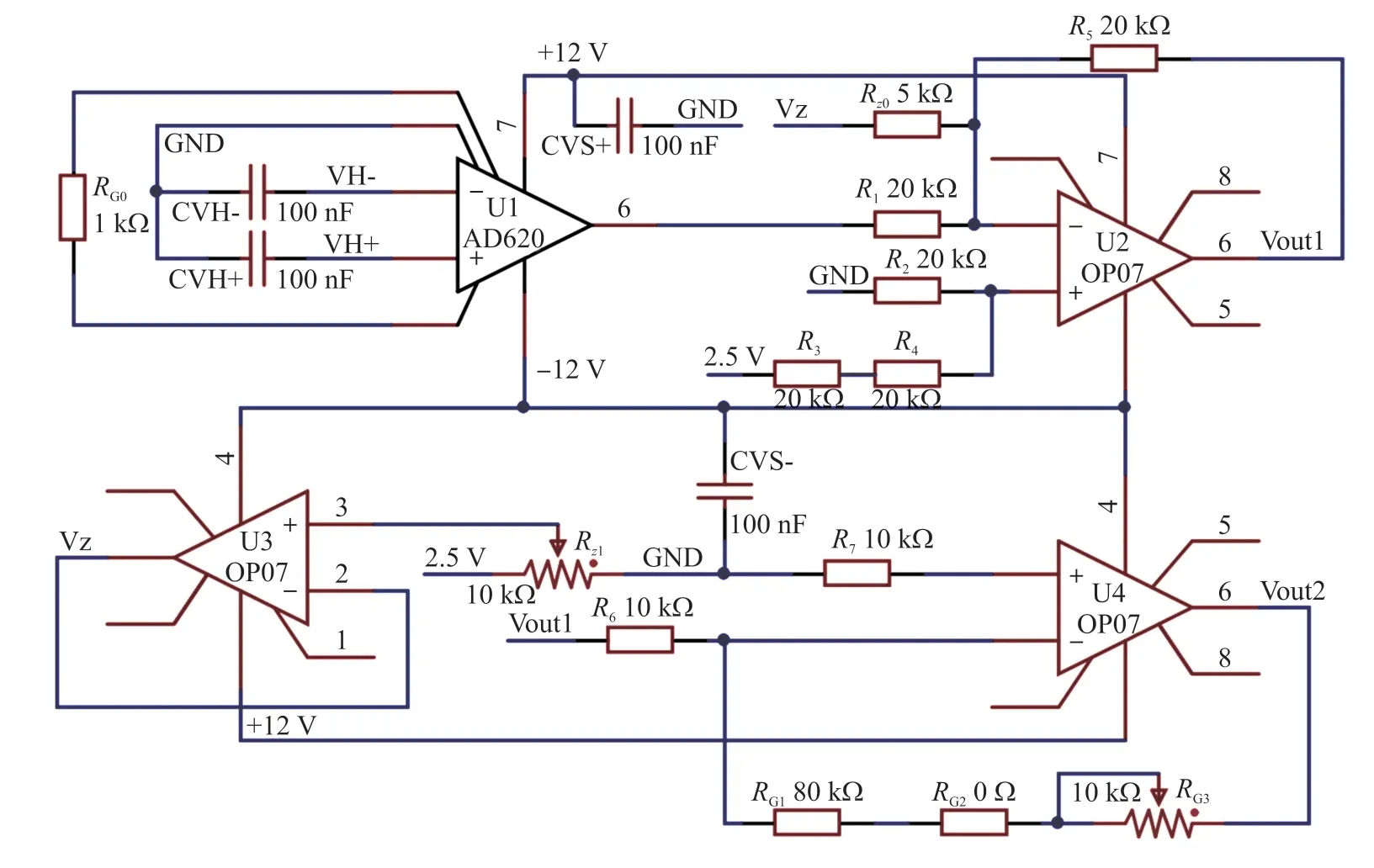
图6 传感器信号处理电路
根据仪表放大器AD602 的特性,当RG0=1 kΩ,霍尔输出电压的一级放大约为50 倍,通过运算放大器对仪表放大器输出电压进行调零和二次放大,利用U2设计加减运算电路对霍尔输出电压进行调零,其输出值为:
式中:R3、R4、R5的阻值均为20 kΩ,Rz0的阻值为5 kΩ。
利用U4对调零后的电压进行二级放大,其输出值为:
式中:R6=10 kΩ,RG1、RG2为恒定电阻,RG3为可调电阻。
根据式(4),通过调节RG3的阻值设定二级放大的倍数,使Vout2满足A/D 转换输入电压。通过采用上述3 组独立的信号处理电路对磁场矢量传感器的输出电压进行并行放大、滤波等处理,使霍尔输出电压并行传输给微控制器的3 个模拟信号通道端口,结合三维移动平台可实现快速、准确地采集待测空间的磁场信息。
2.2 磁成像装置软件设计
2.2.1 磁成像装置控制流程
图7 给出磁成像装置控制流程,通过微控制器控制三维移动平台中步进电机的运动,使得磁场矢量传感器在待测磁场空间中扫描磁场信息,保障扫描空间内磁场矢量信息与预设位置信息的对应性。当传感器完成第1 个设定位置的磁场分量测量,移动平台会带动传感器测量第2 个设定位置的磁场信息,依次获取全部设定位置的磁场信息,并通过串口通信的方式发送给计算机,最终形成磁场分布图像。
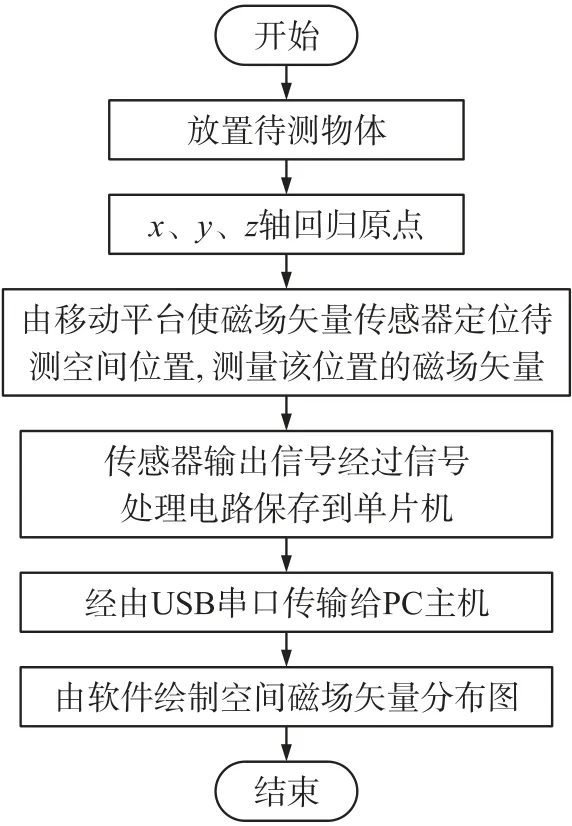
图7 磁成像装置控制流程图
2.2.2 磁场矢量数据处理流程
由微控制器和开发的Python 应用软件实现数字信号处理、数据筛选及分析、磁场数据存储和人机交互界面功能。采用微控制器中已经连接好的10位快速A/D 转换芯片对磁场矢量传感器输出的模拟信号进行采集,通过均值滤波的方式对磁场数据进行数字滤波,防止外部环境引起的信号干扰。微控制器将对应测量位置的霍尔输出电压和位置信息通过串口打印到显示屏上,通过编写的Python 程序捕捉USB 数据线传输的磁场信息和位置信息,自动整理到Excel 文件中并保存。整理Excel 文件的数据为数值矩阵,转换成三维的立方数据矩阵,并与位置坐标结合,经过软件程序的计算,完成空间磁场矢量图像的绘制。
3 实验结果与讨论
3.1 磁场矢量传感器特性测试
在室温条件下,采用磁场发生器系统对磁场传感器样品进行磁敏特性测试。外加磁场范围为-1 000 Gs~+1 000 Gs,步长为200 Gs。图8(a)、图8(b)、图8(c)分别给出磁场矢量传感器x、y、z方向霍尔元件的磁敏感特性曲线。实验结果表明,霍尔输出电压与外加磁场B具有较好的线性关系,磁灵敏度分别为1.21×10-2mV/Gs、1.19×10-2mV/Gs和1.30×10-2mV/Gs,最大零点漂移为2.80 mV。本装置传感器测量磁场的范围为-1 000 Gs~+1 000 Gs,磁场分辨率为2 Gs,由于地磁场远小于传感器的磁场分辨率,因此本装置在测量中忽略地磁场的影响。

图8 霍尔输出电压与外加磁场关系曲线
3.2 空间磁场矢量测试与分布
图9 给出4 个条形磁铁构成的待测磁场环境,条形磁铁长度、宽度和高度分别约为48 mm、18 mm、4 mm,将条形磁铁并排放置在亚克力板载物台上。测试中将待测永磁铁放置在传感器的上方,实际测试永磁铁下表面和下方一定空间的磁场,测试空间为150 mm×150 mm×60 mm,设置移动平台步进距离为3 mm,共设定50 000 个测量位置,空间分辨率为3 mm3。
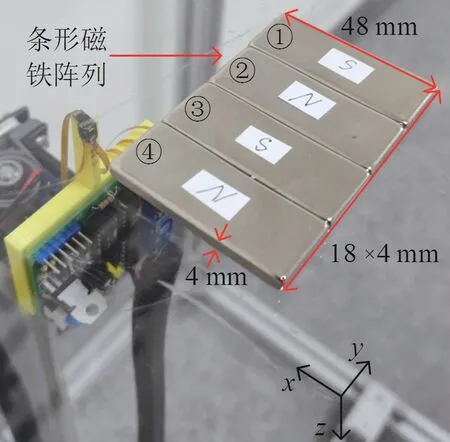
图9 条形磁铁阵列排布方式
图10(a)给出条形磁铁阵列表面的三维磁感应强度彩云图,图10(b)和图10(c)分别为磁感应强度投影彩云图和矢量图,其中x、y轴分别代表x、y方向的测量范围,z轴坐标代表磁感应强度的大小,在软件中,由式(2)计算每一个测量点的磁感应强度大小和方向,并利用插值法将4 个条形磁铁附近的磁场信息插入到待测空间的预设位置信息中。从图10(a)中可以看出,在位置Ⅰ处的磁场矢量模较大且大于0,定义磁极为N 极,位置Ⅱ处的磁场矢量模较大且小于0,定义磁极为S 极。通过对磁铁表面空间磁感应强度分布图像进行分析,在每一个条形磁铁的表面中间位置处磁感应强度较强,边缘位置磁感应强度较弱,磁感应强度由边缘向中间逐渐增强,且磁感应强度大小具有一定的对称性,中间磁场最大约为472 Gs,这与条形磁铁的磁场大小基本一致。邻近的两个条形磁铁表面呈正反向磁场交替式连接,两个条形磁铁连接位置磁感应强度大小相等且方向相反,相互抵消,磁场大小近似0 Gs。
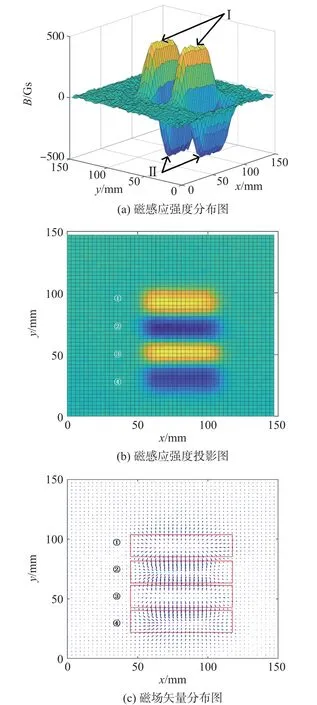
图10 条形磁铁阵列表面磁感应强度示意图
图10(b)一个方格代表一个磁场成像的像素点,对比图10(a),①号和③号区域的磁极为N 极,②号和④号区域的磁极为S 极,外围磁场较弱,可忽略不计,可以看出4 个条形磁铁表面为强磁场区域且邻近的磁场区域磁场方向相反;每个条形磁场区域沿x方向约有16 个像素点长度,沿y方向上约有6 个像素点宽度,设置的每个像素点大小均为3 mm×3 mm,从图中可以推断出所测量的磁性样品平面尺寸约为48 mm×18 mm,与待测永磁铁大小基本相符。图10(c)给出条形磁铁阵列表面空间磁场矢量在xy平面的投影图。第1 个和第3 个磁铁表面磁性均为N 极并呈发散趋势,第2 个和第4 个磁铁上表面磁性均为S 极并呈吸收趋势,四个磁铁为N 极和S 极交替连接,在每个磁性为N 极的磁铁四周磁感线都由两边的磁性为S 极的磁铁吸收。每个条形磁铁的中间磁感线密集,四周磁感线稀疏且向中间呈吸收或发散趋势,但磁感应强度由内向外逐渐减小。从图中可以看出,相邻的两个磁铁,磁性相反,在连接处的磁感线近乎平行趋势。
图11(a)、图11(b)分别给出条形磁铁阵列表面和附近待测空间磁场矢量分布图,每个测量位置均由有向线段表示磁场矢量,箭头方向表示磁场的方向,线段长度表示磁场的大小。从图11(a)中可以看出,在每个条形磁铁的表面中间位置有向线段密集,即磁感线密集且磁感应强度较强,边缘磁感线稀疏。邻近的两个条形磁铁表面呈正反向磁场交替式连接,且在两个条形磁铁连接位置的磁感应强度大小相等且磁场矢量方向相反,相互抵消。

图11 条形磁铁阵列表面空间磁矢量分布三维图
从图11(b)中可以看出,在z方向(即传感器距离被测物体的高度)离磁铁表面越远,有向线段的长度越短,表示磁感应强度越小,直至衰减到地磁场大小。距离磁铁表面约39 mm 附近,磁场基本为地磁场,距离磁铁表面39 mm~60 mm 的待测空间检测不到磁铁的磁场。
4 结论
针对空间磁场矢量测量与分布,本文设计并制作了由磁场矢量传感器、三维移动平台和信号处理电路等构成的磁成像装置。通过对条形磁铁阵列附近的空间磁场测量、测试数据处理和成像分析,主要结论如下:①该装置可实现待测空间的磁场矢量测量,并能够形成空间磁场分布云图,清晰反映被测空间的磁场大小和方向;②该装置通过三维移动平台缩小传感器的测量间距,可有效提高待测空间磁场矢量测量的空间分辨率,增强被测空间磁场矢量的成像效果。
