2FY-6型液态有机粪肥施肥机研制与试验
2024-01-11张俊杰李霄鹤袁兴茂么立申张西群焦海涛
张俊杰,李霄鹤,袁兴茂,么立申,张西群,焦海涛
(河北省农业机械化研究所有限公司,石家庄 050051)
0 引言
随着现代化技术的发展,散户养殖正在逐渐被规模化养殖取代。以石家庄市栾城区河北鼎源牧业有限公司为例,其主要以奶牛养殖为主,奶牛数量800余头,每日会产生大量的粪尿及清理的污水。养殖废水主要包括部分粪尿、清洗废水以及生活污水,每日排放约38.4m3,排放的废水中有大量的氮、磷、有机物,是一种高浓度有机粪肥。民间流传有“庄稼一枝花,全靠粪水来当家”的俗语,而粪水的回用率却极低[1-7]。绝大多数养殖企业的养殖废水未经无害化处理,直接排放入池塘或水渠,对土壤、水质、大气造成污染,仅有极少部分被回用的养殖废水也是通过大水漫灌方式用于农业灌溉中。造成养殖废水乱排放、回用率低的原因:一是养殖废水无害化处理成本较高,且费工费时;二是养殖废水施用机械短缺[8-15],且施用量不均匀。因此,针对养殖废水施用机械短缺及智能化程度低的问题,研制了一种液态有机粪肥施肥机。
1 液态有机粪肥施肥机的设计
液态有机粪肥施肥机由动力行走系统、贮肥装置、粪水均分装置、粪水开沟注射装置及流量智能调控系统等组成,如图1所示。
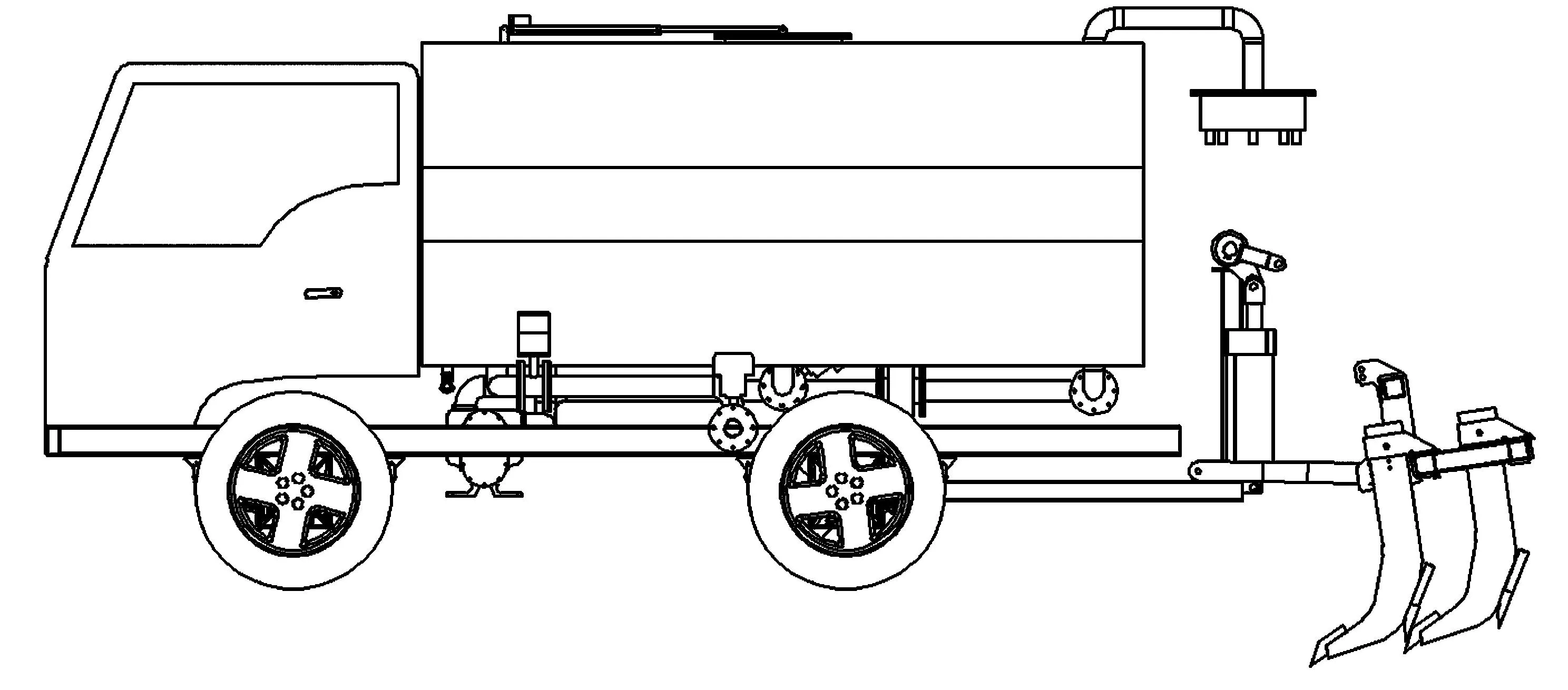
图1 液态有机粪肥施肥机结构示意图Fig.1 Schematic diagram of liquid organic manure fertilizer applicator
1.1 结构设计
液态有机粪肥施肥机采用四轮驱动工程汽车底盘,底盘上安装贮肥装置,贮肥装置末端设有粪水均分装置;粪水开沟施肥注射装置位于汽车尾部,粪水均分装置下方,通过软管与粪水均分装置连接。粪水开沟施肥注射装置由悬挂装置将其固定,悬挂装置与施肥车后桥固定;贮肥罐以椭圆式结构安装于底盘上,由螺栓固定;贮肥罐与汽车底盘之间排布管道,管道上设有电动注液控制阀、压力表、流量计等;管道连接贮肥罐右侧的泵体进液口与出液口,泵体转动由发动机经取力器、传动轴传递;流量智能调控系统设置在驾驶室内的仪表盘旁侧,智控系统电源来源于施肥车蓄电池(24VDC);另外,驾驶室内还设有液位监视仪器,供驾驶员实时监测贮肥罐内液位情况。
1.2 工作原理
1)液态粪肥抽取:以粪污水泵为动力源,以施肥车蓄电池为智能控制系统电源,将液态有机粪肥施肥机静置于养殖场的集水沉淀池旁;带有过滤网的软管置于沉淀池内,软管另一端与液态有机粪肥施肥机粪肥进口连接;开启流量智能调控系统中的吸肥开关,电动注液控制阀通电打开,同时发动机通过取力器将动力传递至粪污水泵,水泵转动将粪水由沉淀池通过进肥口抽取至罐体内。
2)液态粪肥注射:将粪水运输至田间开始作业时,开启流量智能调控系统中的注射开关,将罐体内的粪水由水泵、连接注射管路的电动注液控制阀开启后,通过粪水均分装置将粪水均匀、定量地注射至各个开沟施肥器内,由开沟粪水开沟注射装置开沟后注入田间。
2 主要工作部件设计
2.1 液态有机粪肥智能控制系统
控制系统为智能粪水注射装备的核心,实现沉淀池内的粪水抽取与田间注射工作,由继电器、开关、泵体、时间继电器及注液控制阀等组成。控制系统工作原理图如图2所示。
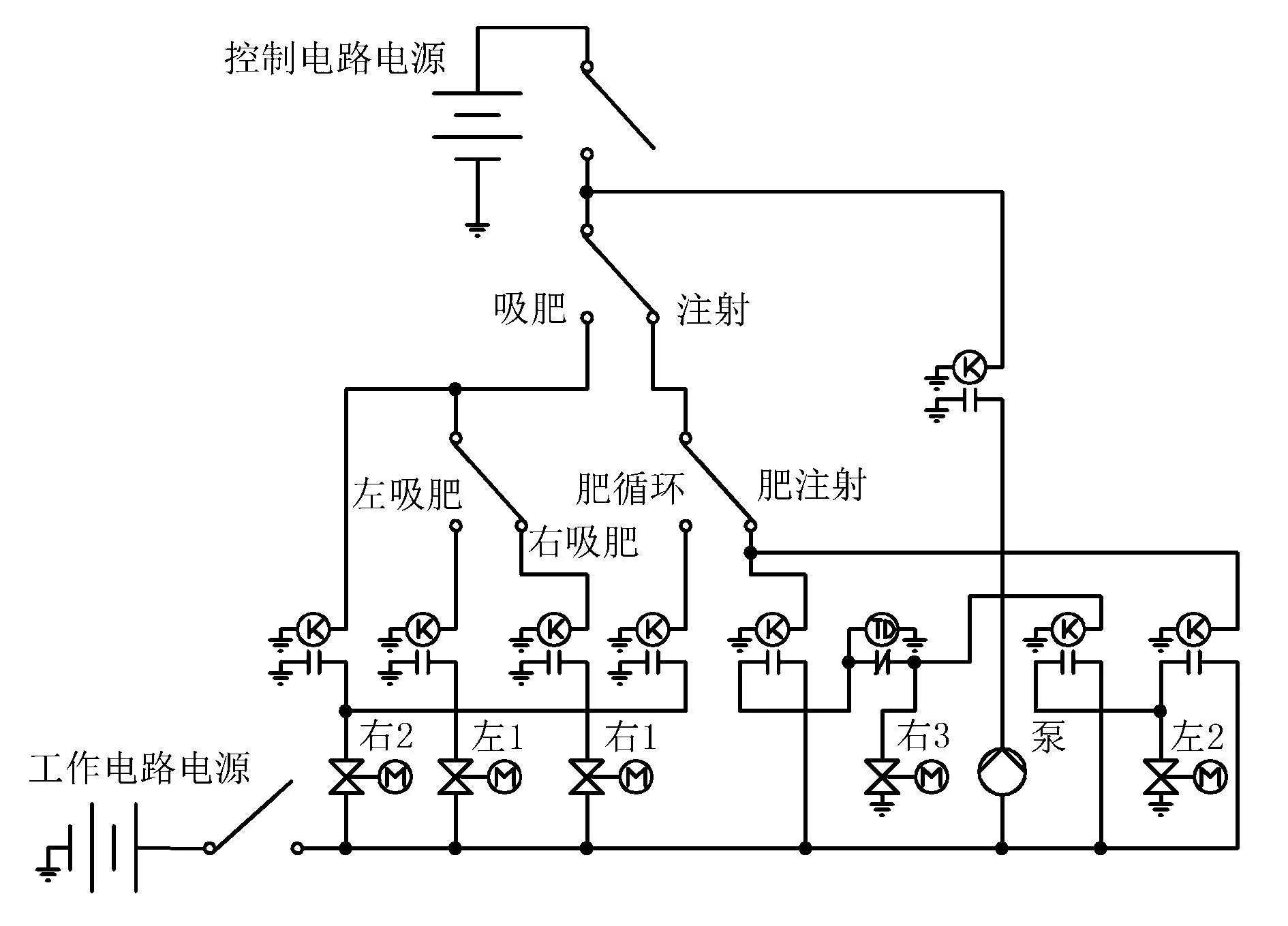
图2 控制系统工作原理图Fig.2 Working principle diagram of control system
由粪水沉淀池向储存罐抽取粪水时,吸肥开关接通,吸肥开关通电,其连接一个正反开关,即左、右吸肥功能。右吸肥接通时,右1(电动注液控制阀)打开,粪水由此侧电动调节阀流入,经过泵体、右2(电动注液控制阀)进入罐体内;左吸肥接通时,左2(电动注液控制阀)打开,粪水由此侧电动调节阀流入,经过泵体、右2(电动注液控制阀)进入罐体内。
由存储罐向田间注射粪水时,注射开关接通一个正反开关,即肥注射与肥循环功能。肥注射接通时,左1(电动注液控制阀)打开,粪水经过水泵、右3(电动注液控制阀)流入粪水均分装置,由开沟施肥器注入田间;控制系统通过时间继电器控制右3(电动注液控制阀)的开合程度,进行注肥流量调节。
由于粪水抽吸工作均在养殖场内的沉淀池进行,抽吸完毕后运输至田间,为避免在运输过程中粪水内的杂质沉淀,控制系统还设置了粪水搅拌功能。当需粪水搅拌时,接通注射开关,再接通肥循环,左1(电动注液控制阀)打开,粪水流经泵体、右2进入罐体内,使粪水流动混合,达到防止沉淀的目的。
2.2 粪水均分装置
液态肥量均分机构包括锥形分流筒、余液贮存箱、肥液导流管及排肥管等,如图3所示。

图3 粪水均分器Fig. 3 Manure equalizer
其中,锥形分流筒呈圆锥形结构且内部中空,其锥面上设置有3排(每排大小相同)排肥孔。第1排排肥孔尺寸最小,第3排排肥孔尺寸最大。第1排与第2排排肥孔数量相同,与肥液导流管数量相同,数量均为9;第3排排肥孔数量为18。在锥形分流筒的内部设有与排肥孔连接的排肥管,第1、2排排肥管一一对应插入肥液导流管内,第3排相邻两个排肥管插入相近的肥液导流管内。锥形分流筒底部与余液贮存箱底部密封固定,其顶部与液体排肥管密封连接,当肥液流入贮存箱内时,肥液从锥形表面留下时,由一排排的排肥孔流入排肥管内,未流入排肥孔的剩余肥液留存至贮存箱内,当其肥液高度大于锥形表面上的排肥孔时,再由排肥孔内流出。在余液贮存箱底部设置观察口,用于观测、调整排肥管。
2.3 罐体及管路设计
罐体设计为长2.9m、宽1.78m、高1.3m方形(四角圆弧)罐体,罐体顶端设有人孔(直径450mm),同时人孔也可以作为粪水的进入口,人孔盖采用电动形式开合,如图4所示。罐体较长,抽取粪水后需运输,内设防浪板以避免液体晃动对车体造成的不稳定问题。
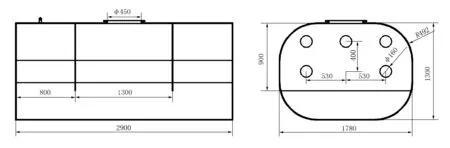
图4 罐体与防浪板结构图Fig.4 Structure Diagram of tank and wave board
罐体底部中间的最前端设置排肥观察口,用于停机工作后排出罐体内剩余的粪水;出肥口、进肥口在尾端开设孔用于管路穿过罐体内部连接尾部的粪水均分肥装置,有利于缩短施肥机整体长度。管路布局(见图5)为:罐体两侧设置粪水抽取口接头,两侧接头通过直管连接(其为管路1),在抽水口接头端均设置电动注液控制阀,紧邻右侧电动注液控制阀(有水泵的一侧)设置一条管路(管路2)连接水泵顶端接口;水泵另一端口接通两路管路,管路3连接罐体底部进肥口,在此管路上设置电动注液控制阀;管路4由罐体底部穿过罐体内,延伸至液态粪水均匀装置,此管路上设置流量计和电动注液控制阀;罐体左侧抽水口电动注液控制阀内侧设置管路5,其一端连通管路一,另一端延伸至罐体底部的出肥口,且此管路上设置电动注液控制阀。

图5 管路旁侧与底部排布图Fig.5 Side and bottom layout of pipeline

1.电动执行机构 2.阀板 3.阀体图6 电动注液控制阀结构图Fig.6 Electric injection control valve structure diagram
向罐体内抽取粪水时,电动注液控制阀打开,粪水流经管路1、管路2进入水泵,再流经管路3、电动注液控制阀进入罐体内;由罐体向田间注射施肥时,电动注液控制阀打开,粪水流经管路5、管路1、管路2进入水泵,再经水泵另一端口、管路4、流量计、电动注液控制阀至粪水均分肥装置内注入田间。考虑到运输时粪水中杂质易沉淀,增设了粪水混合搅拌路线:粪水由出肥口流出,经管路5、电动注液控制阀、管路1、管路2进入水泵,再经水泵另一端口流经管路3、电动注液控制阀进入罐体底部的进肥口,实现粪水在罐体内循环。
2.4 取力器设计
首先,取力器输出转速应满足水泵的转速要求;其次,取力方式应快捷、方便,同时需满足水泵旋向要求;最后,取力器位置应有利于整机传动排布。水泵参数如表1所示。
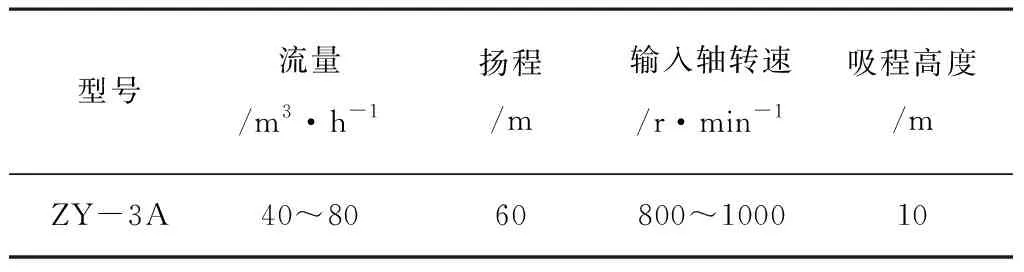
表1 水泵参数Table 1 Pump parameters
经测试,发动机输出轴转速为982r/min(范围值),水泵转速在960r/min左右为水泵运行的最佳状态。为满足水泵额定转速要求,需设计一款传动比在发动机与水泵转速之比范围内的取力器,即
i=n泵/n发
式中n泵-水泵额定转速;
n发-发动机输出轴转速。
由此计算出传动比i在0.81~1.02范围内。
由于发动机转速高于泵体最佳转速为960r/min,故取力器的传动比i取0.98较为适宜。取力器与发动机变速箱末端齿轮啮合,发动机变速箱末端齿轮齿数为32齿,取力器与发动机末端齿轮啮合齿轮齿数为32,输出轴齿轮为31齿,由此计算取力器传动比i为0.97,水泵转速为952.54r/min,此值较为接近水泵转速的最佳状态。
2.5 电动注液控制阀的选择
该机具采用电动法兰软密封蝶阀(见图4),其由电动执行机构、阀体、阀板与密封材料组成,执行器电源为DC24V,电机功率13W,输出力矩50N·m,动作时间为25s,转动角度为0°~(90°±5°),能够满足管路内粪水的启闭要求。
2.6 液位仪的选择
在注射施肥作业过程中,驾驶员要观察机具前的作业条件,不方便观察身后的粪水液位状态,为防止粪水流干造成泵体空转、损坏,需要安装液位仪检测粪水高度。由于粪水具有腐蚀性,首选耐腐蚀的不锈钢材质;工作、运输时粪水晃动,漂浮式结构简单,但其检测液位高度精度差,故采用投入式液位变送器,其通过压力反映液位高度,精度较高。
QDY30A-JX液位变送器检测液位高度到达所设上限液位、下限液位均有上、下限报警提示,具体参数如表2所示。

表2 QDY30A-JX液位变送器参数Table 2 QDY30A-JX Liquid level transmitter parameters
3 试验结果与分析
3.1 试验条件
项目试验区位于石家庄市栾城区中国科学院栾城农业生态系统试验站,试验面积100m×50m,矩形,地块规整,土壤质地壤土,土壤肥力中等,植被平均覆盖量353g/m2,土壤含水率19.4%(0~10cm土层),土壤坚实度0.75MPa,于2021年7月21日进行粪水注射作业。
3.2 注射深度及注射深度稳定性效果试验

U=1-V

表3 注射深度试验数据Table 3 Injection depth test data mm


Sj-第j个行程开沟注射深度的标准差(cm);
N-同一工况中的行程数;
S-注射深度标准差(cm);
V-注射深度变异系数(%);
U-注射深度稳定性系数(%)。
3.3 各行排肥量一致性效果试验
此次注射排肥量测定试验测定行数为6行,重复5次,每次测定长度为20m,数据如表4所示。测定各行总排量与各行排量平均值后,通过计算标准差S和变异系数a,确定各行排肥量一致性。标准差S和变异系数a计算公式分别为
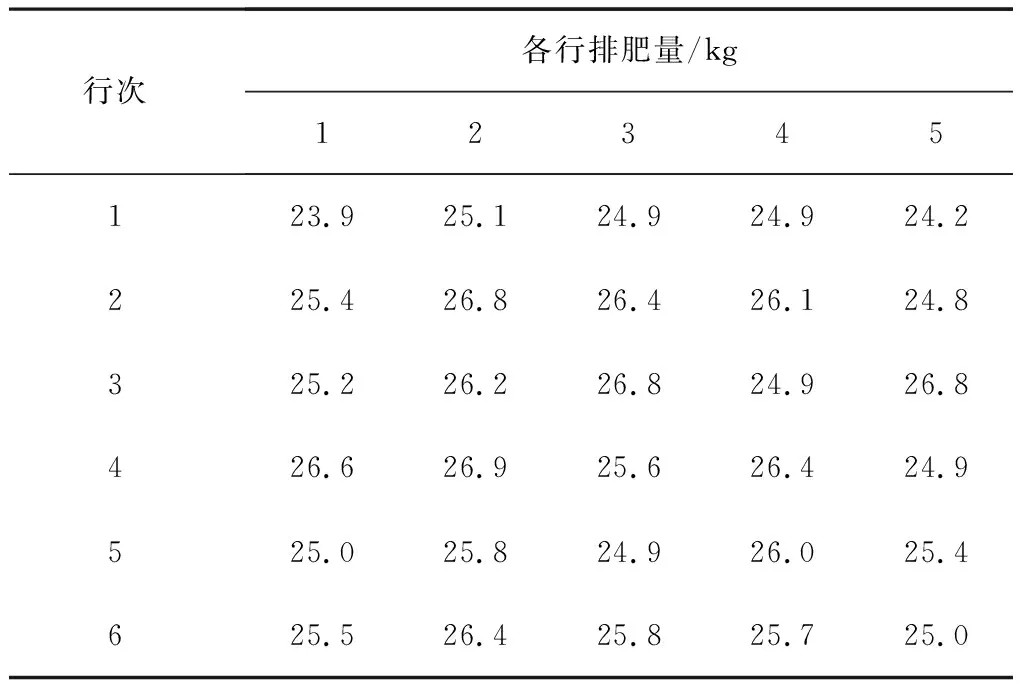
表4 注射排肥量试验数据Table 4 Experimental data of fertilizer displacement by injection
式中X-每行排量(kg);

n-测定行数。
将表4中各行排肥量试验数据代入公式,计算得出标准差平均值S=0.861,各行排肥量变异系数a=3.4%。
对液态有机粪肥施肥机进行的注射深度、注射深度稳定性与各行排肥量一致性测试试验(见表5)证明:该机具性能指标达到设计预期指标,能满足田间注射施肥的各项作业功能。
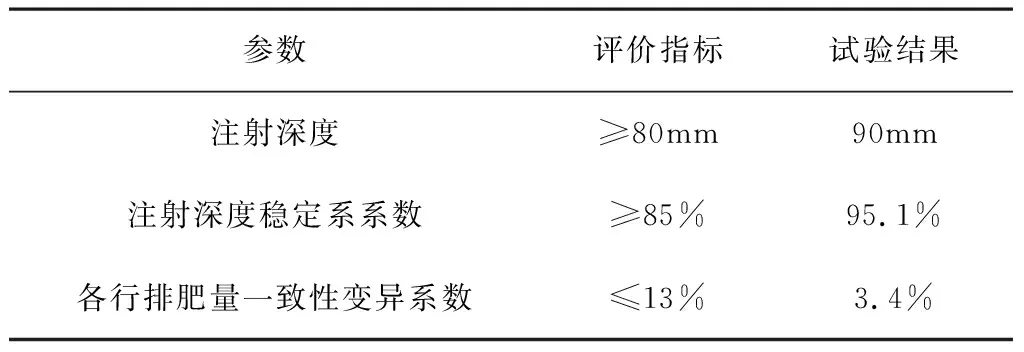
表5 液态有机粪肥施肥机试验结果Table 5 Test results of liquid organic manure fertilizer applicator
4 结论
1)基于养殖废水回用率低的现状,设计了一种液态有机粪肥施肥机,可将沉淀池内的液态粪肥抽取至施肥机内,并运输、精准注射至农作物根部。
2)对智能控制系统进行设计,通过对智控系统中电动注液控制阀的控制,使得注肥作业时粪水能够精准、定量地施入作物根部。
3)对粪水均分装置进行设计,保证各行排肥量均匀一致性较好。
