烟苗移栽机用浇水装置的设计与试验
2024-01-11赵国林刘建新赵仓圆刘剑雄
赵国林,杨 闽,刘建新,杨 腾,赵仓圆,刘剑雄
(1.昆明理工大学 机电工程学院,昆明 650500;2.北京航空航天大学 云南创新研究院,昆明 650504)
0 引言
烟草是我国一种重要的农经作物,其种植面积和产量居世界前列。而移栽作为烟草种植的重要环节,移栽烟苗的成活率直接决定着烟叶的产量和烟农的经济收入。移栽的同时适量浇水对烟苗成活起到关键作用,也是抗旱保墒、节水降耗、减工增收的重要手段[1-3]。
范连祥[4]等设计的烟草自动浇水机中使用了感应装置,不可避免地增加了电磁阀组和相应控制系统的投入,制造成本较高且在工作时不能与移栽作业保持同步。都基建等[5]、李民朝等[6]、张桂荣等[7]、郭凤江等[8]研究的烟苗移栽机所用浇水装置是将所获取的浇灌用水引入到一个特制容器之中,并通过设置简易阀门来控制水流通断,以实现对所移栽烟苗的间歇式浇灌;但由于在作业过程中移栽机存在振动和颤抖,简易阀门很难密封到不漏水的程度,无法达到节约用水、提高水资源利用率的目的。姬虹等[9]设计的烟苗移栽机浇水系统,可使浇水口实现位移补偿,从而克服了浇水时对烟苗冲击大、浇水位置精度低的缺点;但没有将浇灌用水准确地浇灌到烟苗上,同样造成了水资源利用率不高及成本投入较大等问题。
针对上述问题,提出了一种烟苗移栽机用浇水装置,建立了该装置的三维模型,并对其关键部分做了相关理论研究,且用ADAMS软件对倒水组件进行了动力学仿真,得到了相关的运动特性;最后,通过对装置的浇水组件进行浇灌试验,测量浇灌作业所需时间。结果表明:倒水所需时间和总浇灌时间随水量的增加而增加;此外,导流器出水口口径的大小也是影响浇水时间的重要因素,口径越大,导流速度越快,所需时间越少;浇水装置在浇水时不会对幼苗和土壤造成强烈冲击,能够与移栽机的移栽作业保持同步运行,可提高水资源利用率,适用于缺水少雨地区。
1 装置结构与工作原理
1.1 装置结构组成
烟苗移栽机用的浇水装置主要由浇水组件和倒水组件组成,如图1所示。图1中,浇水组件包括导流器、引流管、浇水器,其余部分为倒水组件。组装时,进水管通过阀门连接移栽机上设置的水箱,获取浇灌用水,并将其引入储水器中;储水器、储水器铰轴和储水器铰轴座之间相互铰接,储水器铰轴座固定连接在移栽机上;连杆的一端与储水器铰接,另一端与曲柄铰接;曲柄铰轴座固定设置于移栽机上,曲柄铰轴铰接于曲柄铰轴座上;曲柄的一端与连杆铰接,另一端固定连接于曲柄铰轴上;导流器设置于储水器下方,并设置于储水器倾倒浇灌用水流经的轨迹上;导流器下方的出水口处连接有引流管,引流管的末端安装有浇水器,浇水器上分布有若干出水孔。
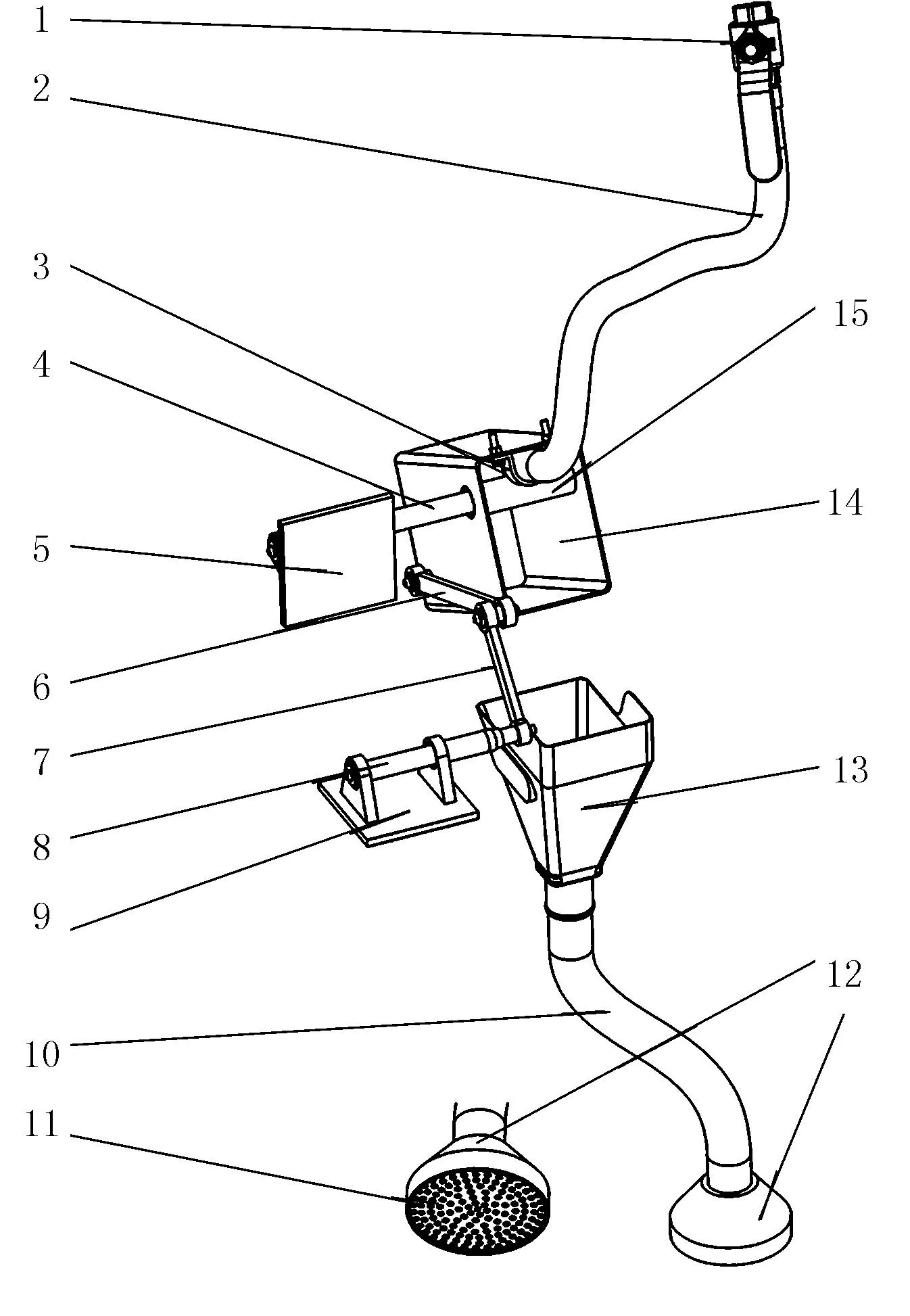
1.阀门 2.进水管 3.管卡 4.储水器铰轴 5.储水器铰轴座 6.连杆 7.曲柄 8.曲柄铰轴 9.曲柄铰轴座 10.引流管 11.出水孔 12.浇水器 13.导流器 14.储水器 15.轴套图1 烟苗移栽机浇水装置Fig.1 Watering device of tobacco seedling transplanter
1.2 工作原理
在幼苗移栽过程中,接通阀门使水箱里的灌溉用水经进水管流入储水器内;在驱动力的作用下,曲柄铰轴绕其自身轴线做回转运动,同时曲柄与曲柄铰轴保持同步转动并驱动连杆运动,储水器则在连杆的作用下绕储水器铰轴做倾转运动;当储水器倾转一定角度且其中的浇灌用水积累到烟苗所需的量时,储水器继续倾转并快速把储水器内一定量的灌溉用水快速倾倒入下方导流器中,从导流器流出的灌溉用水经引流管,浇灌到移栽后的烟苗上。
将装置中倾倒灌溉用水组件的关键部分曲柄、连杆、储水器简化为如图2所示的机构运动简图,图2中参数所表示的含义如表1所示。

表1 图2中各参数的含义Table 1 The meaning of each parameter in figure 2 above
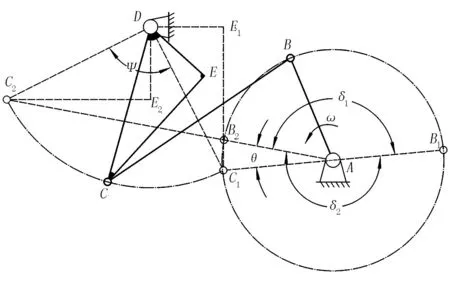
图2 关键部件的机构运动简图Fig.2 Mechanism movement diagram of key components
设曲柄AB为原动件并以等角速度ω逆时针转动,存在极位夹角θ;在曲柄转动1个周期中,设其从AB1→AB2为推程,从AB2→AB1为回程,故该机构运动过程中的行程速比系数K[10]为
(1)
式中V1-推程时C点的平均速度(m/s);
V2-回程时C点的平均速度(m/s);
T1-推程所需时间(s);
T2-回程所需时间(s);
δ1-曲柄从AB1至AB2转过的角度(°);
δ2-曲柄从AB2至AB1转过的角度(°);
θ-极位夹角(°)。
由式(1)可知:推程平均速度大于回程的平均速度,即储水器在做倾转倒水过程中的平均速度大于其往回转动而储水过程中的平均速度。
2 关键部分分析
2.1 数学模型的建立及理论分析
为进一步研究该装置的关键部件(即曲柄连杆机构)的运动特性,采用复数矢量法建立机构运动过程中的数学模型,并对其运动过程进行运动学分析[10-11]。如图3所示:以A点作为复坐标系原点,以水平方向为x轴(x轴向右为正方向)、竖直方向为y轴(竖直向上为正方向),建立复坐标系XOY,作出封闭矢量多边形图并标记各矢量。图3中各相关参数及符号含义如表2所示。
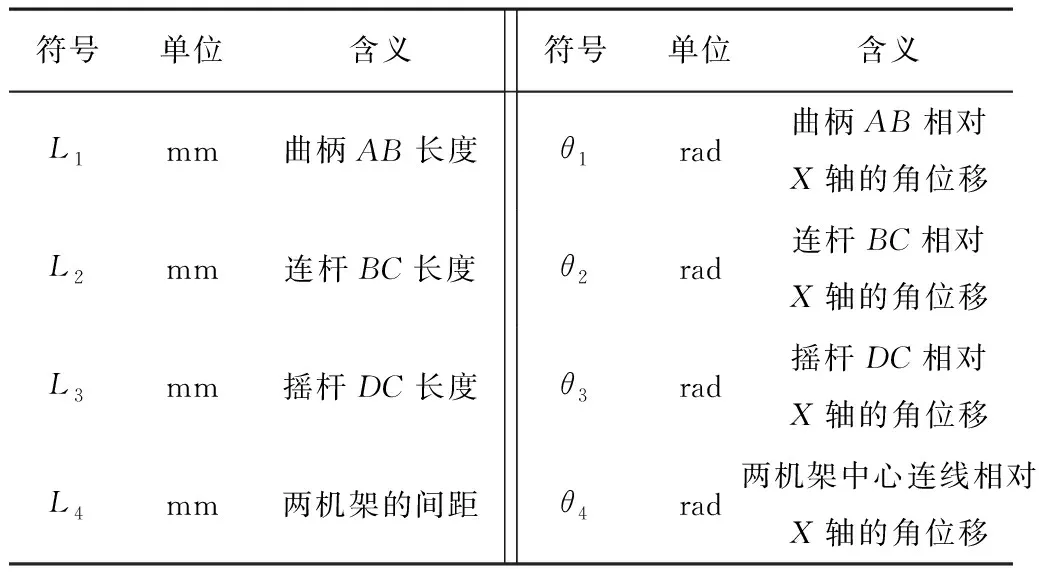
表2 封闭矢量多边形图中相关参数的含义Table 2 Interpretation of relevant parameters in closed vector polygon graphs
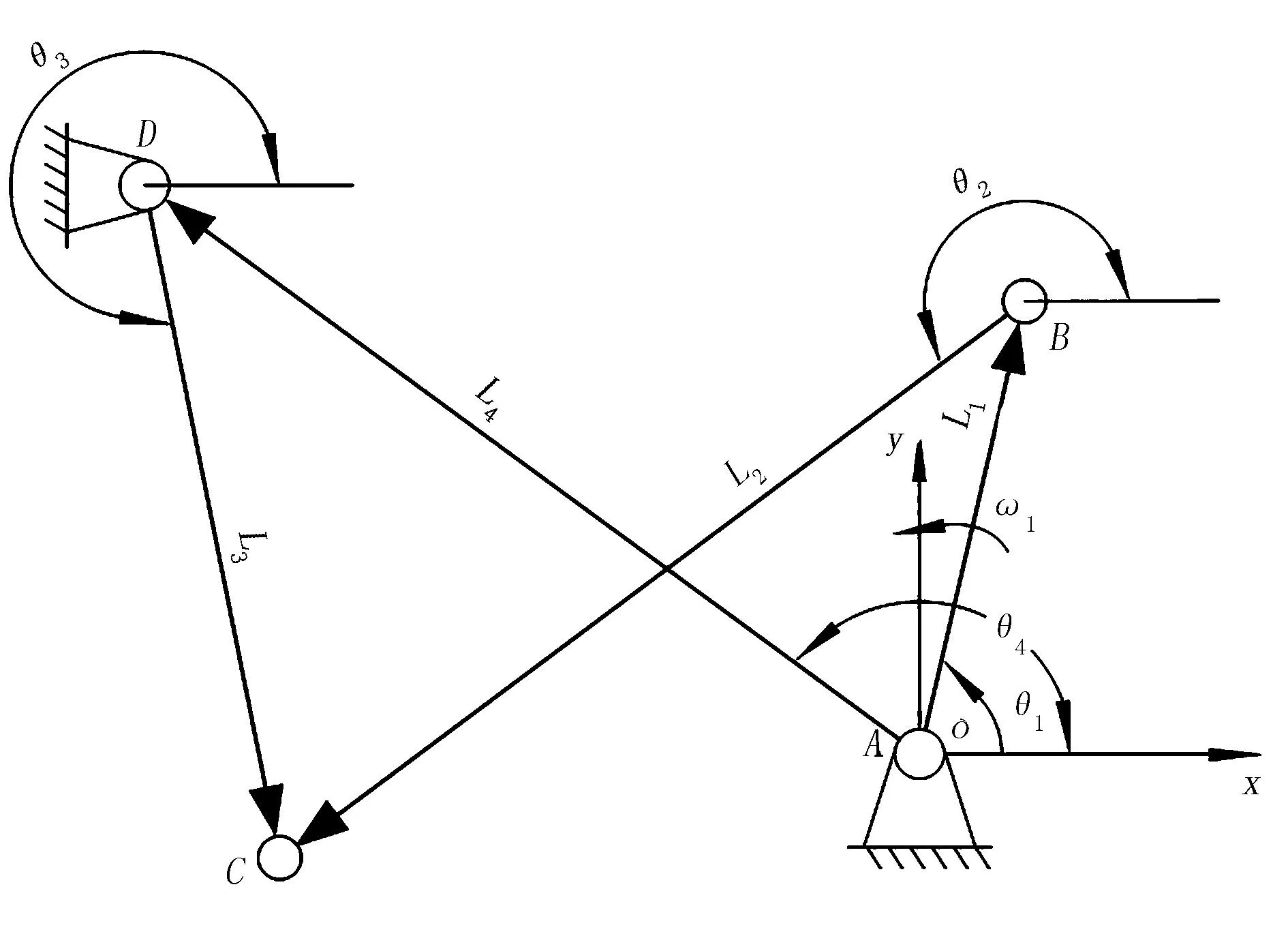
图3 封闭矢量多边形图Fig.3 Closed vector polygon map
在矢量多边形中,各矢量之和为0,即
(2)
(3)
其中,各矢量的方位角θ都由x轴开始,沿逆时针方向计量为正。在运动过程中的变量为θ1、θ2、θ3,常量为L1、L2、L3、L4、θ4,且设已知初始时刻原动件(曲柄AB)的方位角为θ1、等角速度为ω1。将封闭矢量方程式(2)表示为复数形式为
L1eiθ1+L2eiθ2=L3eiθ3+L4eiθ4
(4)
应用欧拉公式eiθ=cosθ+isinθ将式(4)实部与虚部分离得
(5)
联立上式(5),即可解得角位移为
(6)
(7)
将式(4)对时间t求导可得
L1ω1eiθ1+L2ω2eiθ2=L3ω3eiθ3+L4ω4eiθ4
(8)
由于L4为两机架间距离,固定不动,所以ω4=0,因此式(8)可写为
L1ω1eiθ1+L2ω2eiθ2=L3ω3eiθ3
(9)
将式(9)的实部和虚部分离得
(10)
将式(10)中两式之后联立即可解得
(11)
(12)
式中ω1-曲柄L1的角速度(rad/s);
ω2-连杆L2的角速度(rad/s);
ω3-摇杆L3的角速度(rad/s)。
将式(10)对时间t求导并写为矩阵形式可得
(13)
由式(13)可解得
(14)
(15)
式中α2-连杆L2的角加速度(rad/s2);
α3-摇杆L3的角加速度(rad/s2)。
由式(15)可知:连杆BC、摇杆DC在运动过程的中角位移θ2、θ3与各杆的杆长和曲柄AB的角位移θ1有关,当各杆的杆长固定后,θ2、θ3随θ1的变化而变化;而摇杆DC的角速度ω3和角加速度α3、连杆BC的角速度ω2和角加速度α2随各杆的角位移θ、各杆长度L的变化而变化,当杆长固定时,决定其运动速度和加速度的主要因素为ω1。
2.2 运动特性分析
引入各构件的具体参数,利用MatLab基于以上所推导的公式编程,绘制该曲柄摇杆机构的角速度、角加速度曲线图进行运动分析[12],结果表明:当L1=152.281mm、L2=303.45mm、L3=221.37mm、L4=310.54mm、L4与x轴的夹角θ4固定为143.71°时,设置主动件的转速为1.5708rad/s,得出连杆L2和摇杆L3的角速度、角加速度在曲柄角位移θ1从0°到360°运动过程中的曲线图,如图4所示。
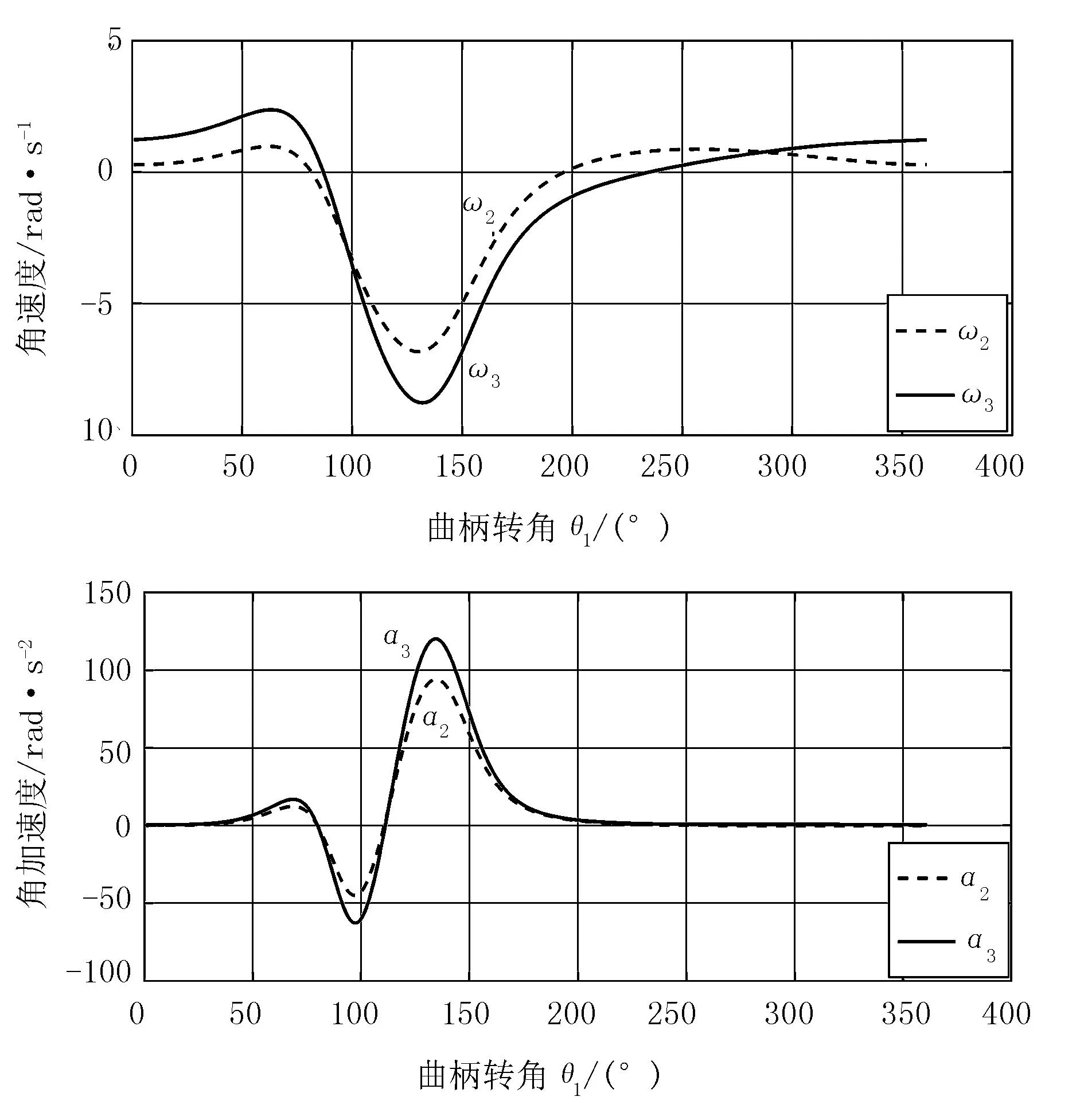
图4 杆2和杆3的速度、加速度曲线图Fig.4 Speed and acceleration curves of rod 2 and rod 3
由图4可以看出:当曲柄角位移θ1在0°~80°和180°~360°范围内时,连杆L2和摇杆L3的角速度ω2、ω3,角加速度α2、α3较为平缓;而当曲柄角位移θ1在80°~180°范围内时,倒水组件的储水器历经了一个倒水过程,其连杆L2和摇杆L3的角加速度α2、α3均出现了两个峰值,且角速度ω2和ω3在130°附近达到最大峰值,满足快速倾倒浇灌用水的需求。
3 倒水组件的ADAMS动力学仿真
为了进一步分析该浇水装置的相关特性,利用ADAMS软件对倒水组件进行仿真分析,如图5所示。将该浇水装置的虚拟样机上半部分倒水组件导入ADAMS软件中,并在各连接处添加相应的运动副,设置重力加速度为9.8m/s2,方向为竖直向下;定义虚拟样机中各结构的材料和密度,各轴承材料选用高碳铬轴承钢(GCr15),密度为密度7.85g/cm3,其余各部件采用45钢,密度为7.85g/cm3;随后,在各铰接处轴承与轴连接的运动副上添加摩擦因数,查阅相关资料定义摩擦因数为0.15;在曲柄铰轴上添加旋转驱动,参数为90d*time,方向为逆时针转动;最后,设置仿真时间为4s,步数为200步,并进行求解、仿真。仿真后得到运动轨迹线i、j、k分别为曲柄逆时针旋转1周过程中储水器的质心、连杆与储水器铰接处、曲柄与连杆铰接处的运动轨迹线。
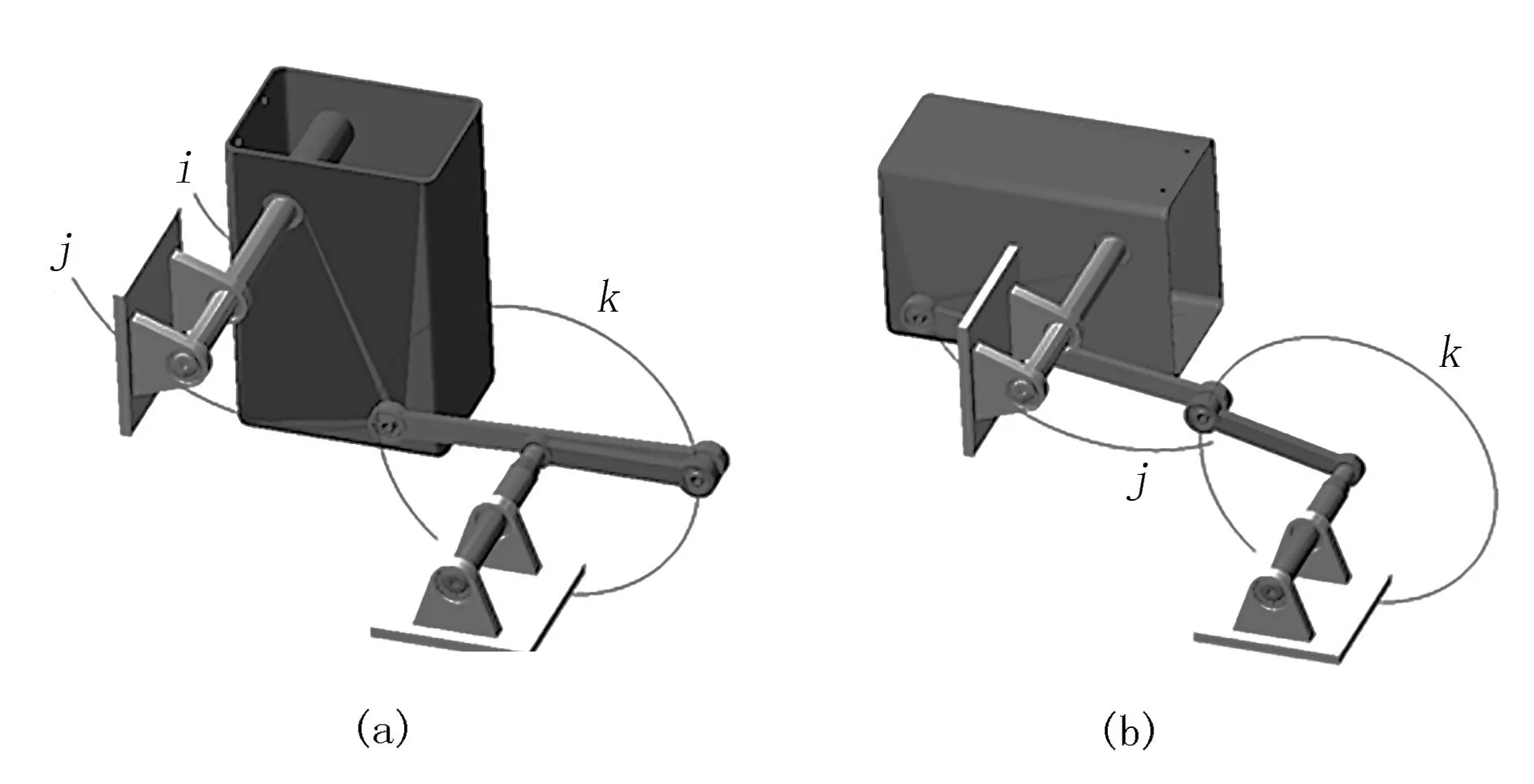
图5 ADAMS中的仿真模型及其运动轨迹Fig.5 The simulation model and its trajectory in ADAMS
工作过程中,4s内曲柄刚好逆时针回转1周,而储水器在连杆的驱动下做了1次摆动运动,即在进水管不间断地将浇灌用水引入储水器的过程中储水器完成了1次倒水工作,并在倒水完成后开始为下一次倒水做储存浇灌用水的准备。图6为储水器在运动仿真过程中的速度、加速度曲线图,所测的点为储水器的质心。
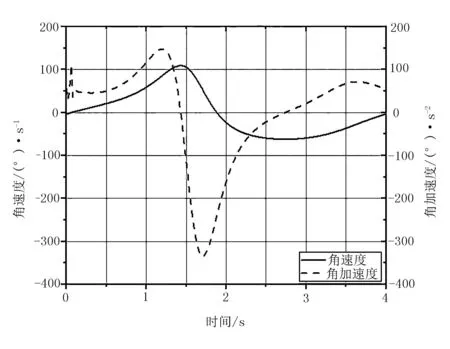
图6 储水器质心的速度、加速度仿真曲线图Fig.6 The velocity and acceleration simulation curve of the center of mass of the water reservoir
由图6可以看出:储水器运动的角加速度曲线在刚开始运动时候出现了少许波动,随后呈现平稳上升的趋势,在1.2s时角加速度达到最大值,随后快速下降,在经历了一个波谷后回逐渐上升回到初始值;而其角速度曲线从开始运动时缓慢上升,在1.2s时因角加速度达到最大值,此时角速度曲线的斜率达到最大,上升最快,1.44s时角速度曲线达到峰值,随后缓慢降低,同样在经历了一个波谷后缓慢上升回到初始值。因此,可认为角速度曲线处于波峰期间储水器经历了一个快速倒水的过程,满足浇水装置浇灌作业的需求。
4 试验
进一步研究浇水装置的浇水性能以及影响浇水时间快慢的因素,为装置的各部件参数设置、优化以及后期将其设于移栽机上与移栽作业保持协调工作提供理论支持。以每次浇水所需时间作为试验指标,针对不同的浇水量测量其从倒水开始至倒水结束、倒水开始至水从浇水器流出的总时长,并在同一水量条件下验证不同导流器出水口口径是否会对浇灌时间产生显著影响。
4.1 试验用具与条件
试验在昆明理工大学机电工程学院实验室进行,试验装置如图7所示。

1.漏斗 2.软管 3.计时器 4.浇水器 5.量杯图7 试验装置图Fig.7 Test device diagram
试验用具主要有PVC透明软管1根,长1m,内径50mm,厚度3mm;佰诺brmb-001电子秒表计时器,精确度为0.01s;佳乐祺塑料量杯1个,口径22cm,高度26.5cm,量程5000mL;荣兴RX-88塑料漏斗3个,出水口口径分别为4.6、4.3、3.7cm;3D打印浇水器1个,材料为光敏树脂,进水口直径50mm,出水口直径136mm,出水口上分布的若干出水小孔直径为8mm。将漏斗与软管、软管与浇水器通过卡箍卡紧连接,使得软管呈现一定的弯曲度,并将整个试验装置固定于试验台上。
4.2 试验过程
通过量杯量取一定体积的水,借助人力将量杯里的水一次性快速倒入漏斗中,倒水时尽量做到使量杯中的水从量杯流出的轨迹与漏斗中部出水口处相吻合,即将水往漏斗中心倾倒,并在量杯倾转倒出的水不溢出的条件下做到尽量快速倾倒,测量时间1(为水开始从量杯中流出至量杯中的水倒完)和时间2(为水从量杯中流出至最后从浇水器流完)。水量的选取从600mL开始每次增加300mL直到3600mL,共11组。每组水量下重复进行20次,取每组中所测的两个时间的平均值,如表3所示。
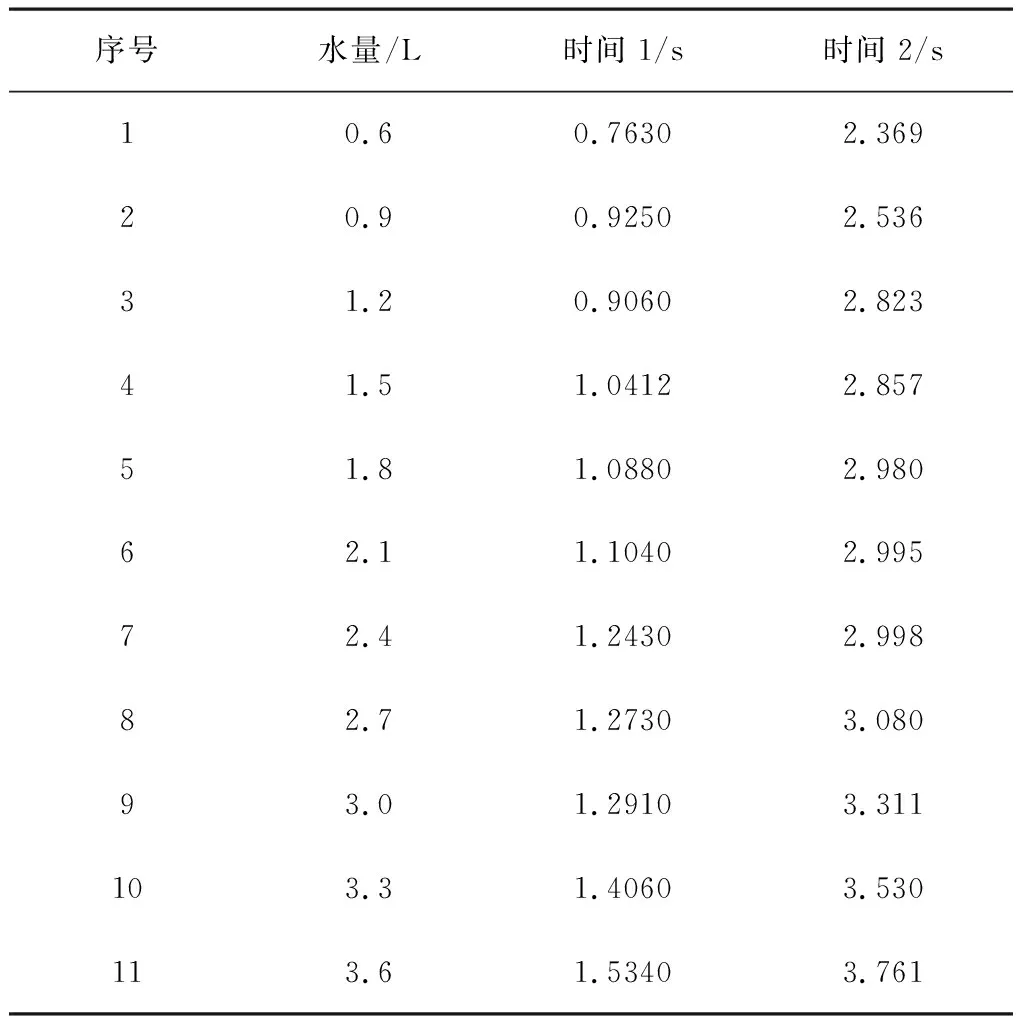
表3 试验数据表1Table 3 Test data sheet 1
为验证导流口口径的大小对浇水时间的影响是否显著,固定每次取2200mL的水,并分别采用4.6、4.3、3.7cm口径的漏斗分3组做浇灌试验,每组重复10次,记录从倒水开始至水从浇水器流完的总时间,数据如表4所示。
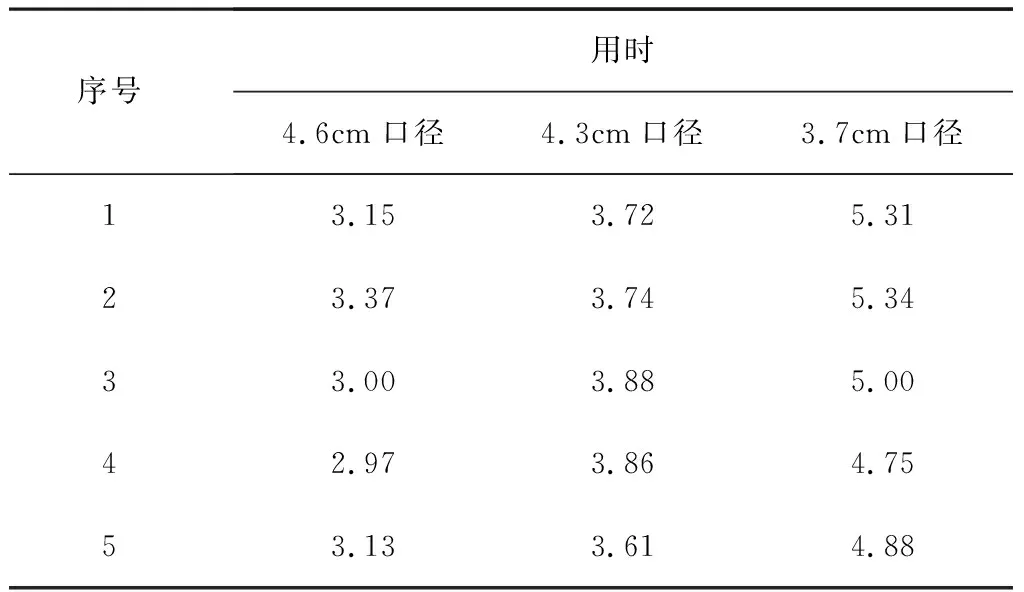
表4 试验数据表2Table 4 Test data sheet 2 s
4.3 试验结果与分析
以表3中的水量作为横坐标、所测时间作为纵坐标,利用Origin软件作出试验中水量与所对应时间的散点图,并根据散点图做一元线性回归拟合,得到水量-时间关系拟合线图,如图8所示。

图8 水量-时间关系的拟合线图Fig.8 Fitting line graph of time-water volume relationship
图8中,y1为从量杯中倒水开始至倒水结束的过程所用时间随水量的变化而变化的拟合线。可以看出:倒水所需时间随水量的增加而呈线性关系增加,其关系式为
y1=a1+b1x
(16)

其中,y2为从量杯中倒水开始至水从浇水器流完整个过程所用时间随水量的变化而变化的线性回归拟合线。可以看出:总时间随水量的增加而增加,且该线的斜率相对y1较大,其关系式为
y2=a2+b2x
(17)

基于以上试验结果和拟合出的式(16)、式(17)可求得:当浇水量为1.5、2、2.5L时,有97.135%的把握估计出倒水时间所在区间分别为(0.956s,1.056s)、(1.064s,1.177s)、(1.172s,1.298s);有92.462%的把握估计[15]出总时间所在区间分别为(2.649s,2.931s)、(2.825s,3.144s)、(3.001s,3.357s)。
基于表4中的针对不同出水口口径的导流器测量其浇水所用时间,并计算得出单因素方差分析表,如表5所示。因为F>F0.95(2,27)=3.3541,所以认为导流器出水口的口径大小对浇水时间的影响是显著的,其置信度为95%。
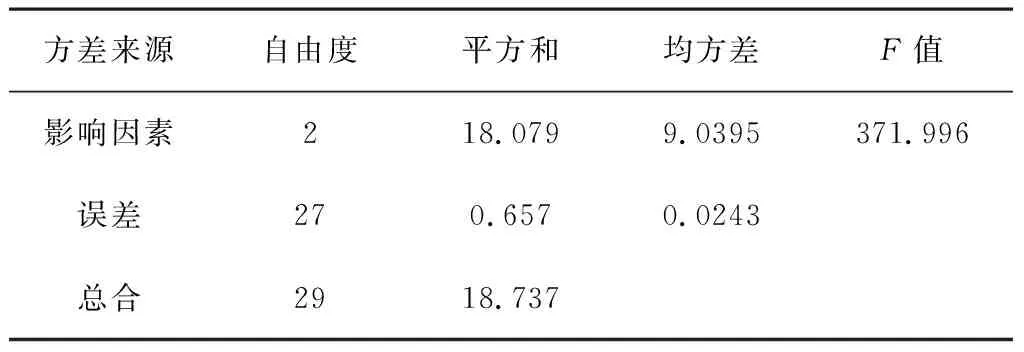
表5 单因素方差分析表Table 5 One-way analysis of variance table
5 结论与展望
1)根据需要设计了一种移栽机用浇水装置,对其运动特性进行了理论研究和动力学仿真分析,结果表明:装置在工作过程中满足快速倒水并有足够时间储水的需求。将装置设置于移栽机上,通过相互协调配合可与移栽机的移栽保持同步作业,起到了抗旱保商、节水降耗的作用。
2)若出现因浇水量大使浇水时间长而导致浇水装置在移栽机不间断地行走过程中将水浇灌在烟苗种植区域以外的问题,可设置一个往复机构进行位移补偿,使其在浇水时带动引流管往移栽机前进方向的反方向运动,可满足一定时间内相对烟苗处于静止状态完成浇水需求。
