兼具强抗偏移性与功率可控性的可重构无线充电系统研究
2023-12-28李振杰霍玉昇何家房刘一琦班明飞
李振杰,霍玉昇,何家房,刘一琦,班明飞
(东北林业大学计算机与控制工程学院,哈尔滨 150040)
无线充电技术通过初级、次级线圈之间交变磁场进行能量传输,因其便利性已经被广泛地应用于医疗设备、电子产品、工业生产、轨道交通等不同领域,有效地避免传导式充电存在的机械磨损、漏电触电、易受天气影响等问题[1-2]。现阶段,上述领域中电子产品/电气设备通常以锂电池作为储能单元,采用恒流/恒压方法补充电能。然而,无线充电过程中,电池的等效负载电阻动态变化直接影响系统工作性能,例如:充电电流/电压、系统效率、软开关ZVS(zero voltage switching)状态等。同时,磁耦合机构作为无线充电系统能量传输的核心环节,实际工况下发射端与接收端之间不可避免的错位也将影响系统工作性能[3]。因此,本文深入地研究了上述两个问题,即充电可控性、偏移适应性,所提技术方案以轻量化接收端为出发点,实现了无线充电系统的高精度恒流/恒压充电以及良好抗偏移性能,研究成果可应用于旋翼无人机、电动滑板车、便携式设备等对接收端重量、体积要求比较严格的场合。
就充电可靠性问题而言,现有文献研究主要集中在补偿拓扑和闭环控制。合理地优化设计4种基本补偿拓扑(串联-串联、串联-并联、并联-并联,并联-串联)的参数,实现了与负载无关的近似恒流或恒压充电[4]。在此基础上,学者们提出多种类型高阶补偿拓扑(例如:LCC、S/SP、T/S 等)、混合补偿拓扑(例如:S-S与S-LCC、LCC-S与S-LCC 等)和切换补偿拓扑(增加交流开关切换不同类型拓扑),实现更高性能(例如:抗偏移性、ZVS 状态)的近似恒流或恒压充电[5-6]。虽然上述补偿拓扑能够一定程度上解决了充电问题,但是存在参数设计复杂、较多无源元件、易受系统参数变化影响、充电精度较低/可控性较差等不足。据此,在合理地增加原边或副边硬件电路基础上,相关文献采用闭环控制策略实现高精度的充电控制。其中,原边控制方法通常采用变频/移相控制的全桥逆变器、占空比可控的DC-DC 变换器,此类方法存在如下问题:充电控制与ZVS 状态难以同时实现、频率分叉导致系统不稳定等[7-8];副边控制方法通常采用半控/全控有源整流、DC-DC 变换器,此类方法给接收端增加了额外的体积、重量与成本,难以满足接收端的轻量化和紧凑化要求。为此,本文提出了一种原边磁通可控电感MFCI(magnetic flux controllable inductor),实现了较高精度的恒流/恒压充电以及较宽范围的ZVS 状态。
就偏移适应性问题而言,从以下4 点展开研究工作:①合理地优化设计线圈/磁芯的结构与参数,充分地利用空间磁场基础上,构造出多种类型耦合机构[9-10],如文献[10]提出了DD 线圈与螺线管线圈串联的混合型耦合机构,实现了互感波动3.15%时x 轴方向67%和y 轴方向44%的偏移容忍度;②优化设计无源元件的构型和参数,高阶、混合、切换、失谐类型的补偿拓扑保证了偏移发生时输出功率的稳定性[11-12],如文献[11]归纳了一系列具备高偏移容忍度且具备近似恒流/恒压充电特性的混合型补偿拓扑;③增加或优化系统电路拓扑的基础上,采用闭环控制策略实现较宽偏移范围内输出功率的稳定性[13-14],如文献[14]设计了一种分数阶无线充电系统,实现偏移发生时恒流/恒压输出;④从系统方案角度出发,采用多个传能通道切换/激活方式,重构无线充电系统的电路拓扑,实现互感波动时输出功率的平稳性[15-16]。在此基础上,融合上述几种方法的优势,本文提出了一种交叠线圈式磁耦合机构MCSC(magnetic coupler with sandwich coils),保证了水平方向上较宽圆形区域内互感平稳性。
综上所述,本文基于“自适应电路切换”的思想,以磁场重构的MCSC 作为能量传输载体,以发射端MFCI 作为功率调控装置,以电流电压双环PI作为闭环控制策略,仅使用发射端模块同时实现3个设计目标(恒流/恒压充电、强抗偏移性能和全桥逆变器中MOSFET 的ZVS 状态),最大限度地保证接收端轻量化的基础上,实现了较宽水平偏移范围内高效恒流/恒压充电。具体而言,本文主要研究工作如下:
(1)分析了可重构无线充电系统的拓扑结构和工作原理,给出了最佳传能通道激活方法,以确保MCSC 的可行性;
(2)设计和优化了MCSC 的构型和参数,确保发生较大水平错位时互感波动的平稳性,确保输出功率的稳定性;
(3)发射端MFCI与双环PI 控制器配合实现了恒流/恒压充电和ZVS 状态,并且辅助提高抗偏移性能。最后,通过仿真和实验验证了所提方法的合理性。
1 电路拓扑与公式推导
首先分析可重构无线充电系统的拓扑结构与工作机理,其次推导模式配置与充电控制用函数表达式,最后阐释功率调控与ZVS 用MFCI 的电路拓扑与工作原理。本章内容旨在为后续磁耦合机构与闭环控制器的设计提供依据。
1.1 电路拓扑与工作机理
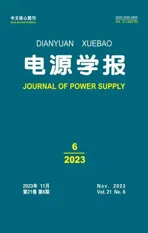
可重构无线充电系统的电路拓扑如图1 所示,其中:发射端包括全桥逆变器(MOSFET Q1~Q4)和3 个传能通道a/b/c,以传能通道a 为例,包括切换开关Sa(由2 个MOSFET Qa1~Qa2反向串联构成)、补偿电容(容值Cpa,内阻Rca)和发射线圈(匝数Npa,自感Lpa,内阻Rpa),另外2 个传能通道的结构相同,MFCI 具体分析见1.3 节);接收端包括接收线圈(匝数Ns,自感Ls,内阻Rs)、补偿电容(容值Cs,内阻Rcs)、全桥整流/滤波器(肖特基二极管D1~D4与无极性电容Co)和锂电池负载;Ubus和Ibus为直流母线电压和电流;us为全桥逆变器的输出电压;3 个发射线圈中谐振电流分别为ipa、ipb、ipc;接收线圈中谐振电流为is;3 个发射线圈与接收线 圈之间 互感分别为Mas、Mbs、Mcs;3 个发射线圈之间交叉互感分别为Mab、Mbc、Mac;全桥整流/滤波器的输入电压和输入阻抗分别为ue和Re;充电电流/电压分别为Io和Uo;锂电池的等效负载电阻为Ro。具体而言,合理地控制Sa、Sb、Sc,激活MCSC 中具备最佳互感的传能通道(存在偏移时,偏离额定互感最小的发射线圈与接收线圈组合),确保另外2 个通道处于开路状态,采用闭环控制的MFCI 实现较大的水平偏移和负载变化下恒流/恒压充电、全桥逆变器中MOSFET 的ZVS 状态。
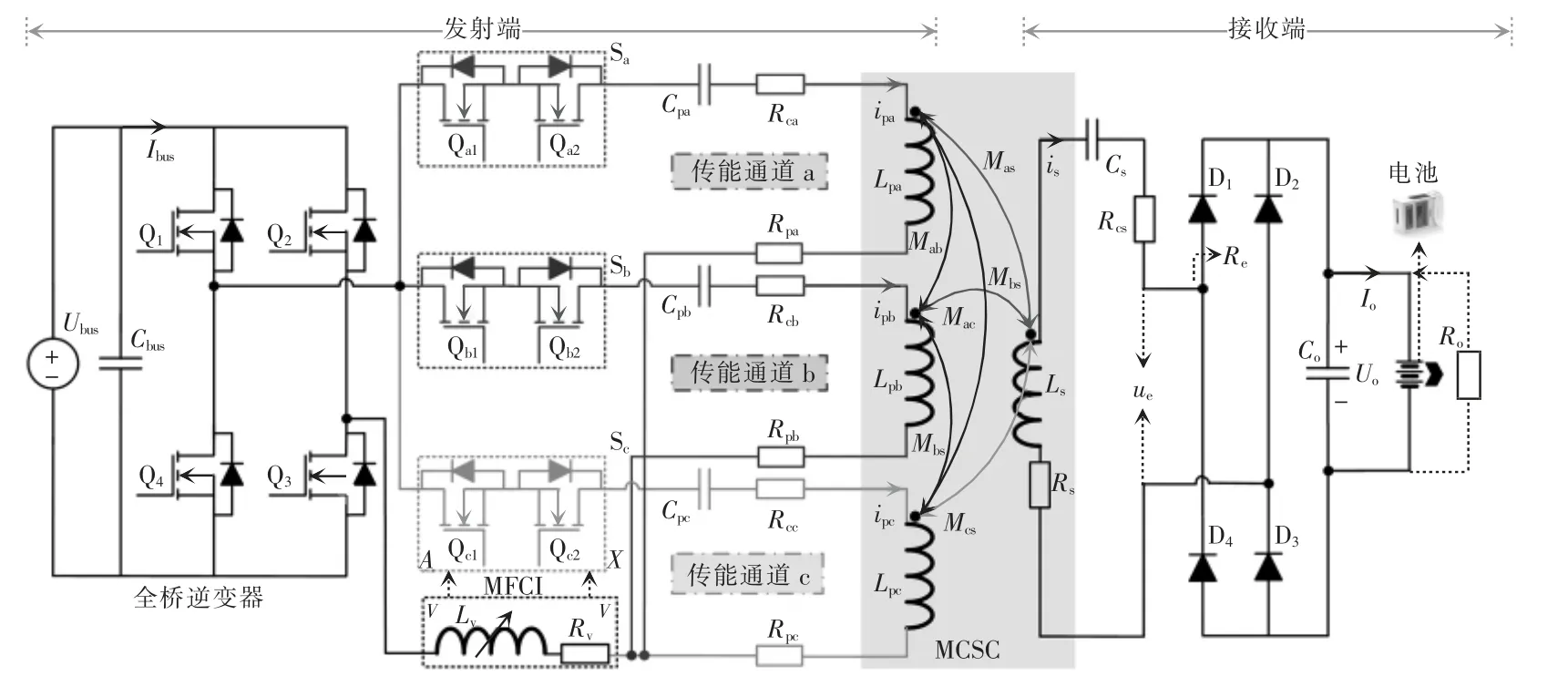
图1 可重构无线充电系统的电路拓扑Fig.1 Circuit topology of reconfigurable wireless charging system
1.2 公式推导与理论分析
就全桥整流/滤波器而言,is的有效值Is、输入阻抗Re与Io、Ro之间的关系表示为
式中,ω 为系统工作角频率。当发射端和接收端的LC 谐振网络满足
时,则发射端阻抗Zp的表达式为
式中:Lv为MFCI 的等效电感;Mp为已激活传能通道对应的互感;R2为Rs与Rcs之和;R1=Rp+Rv+Rc;A=8Ro+π2R2。由式(3)可知,Mp和Ro变化时Zp呈感性状态。全桥逆变器的输出电流与电压之间的阻抗角α 表示为
可见,阻抗角α 大于0,从而保证全桥逆变器中MOSFET 的ZVS 状态,有助于提升系统效率和全桥逆变器的可靠性。就全桥逆变器而言,其输入电压Ubus与输出电压Us之间的关系为
式中,Us为us的基波分量有效值。结合式(1)~式(3),得到充电电流Io的表达式为
充电电流Io与互感Mp、等效负载电阻Ro相关,其不同Lv情况下的仿真结果如图2 所示。
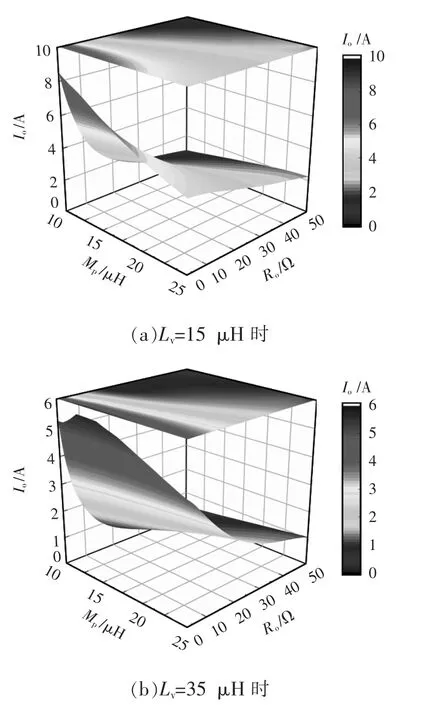
图2 不同Lv 情况下Io与Mp、Ro 之间关系Fig.2 Relationship among Io,Mp and Ro when Lv varies
由图2 可知:当Ro和Mp变化时,调节Lv可以调节Io和Uo;当Ro和Mp为定值时,Lv越大,Io越小。相关结论为后续闭环控制的MFCI 实现恒流/恒压充电提供理论支撑。
进一步,Io与Mp、Ro之间关系如图3 所示。由图可见:当Lv=20 μH 且Ro为定值时,互感Mp越大,充电电流Io越小,如图3 中虚线所示。据此,最佳传能通道激活方法概括为:检测充电电流Io和充电电压Uo,寻找实现最小Io的传能通道,用其进行能量传输即可保证在一定偏移范围内系统高性能运行。
图3 Io与Mp、Ro 之间关系Fig.3 Relationship among Io,Mp and Ro
1.3 系统工作原理分析
结合上述电路拓扑与理论分析,图4 所示系统工作原理框图,由传能通道选择与恒流/恒压充电两个阶段构成。第1 阶段,不能被同时激活的3 个传输通道分别短时间为负载供电。传能通道切换在系统工作初期完成,此过程并非真正意义上为电池充电,仅通过3 个传能通道为锂电池提供短暂的电能补充,通过判断充电电流和充电电压,确定最佳传能通道。通道切换时,考虑到储能元件泄能问题,会先将该通道关闭一段时间后,保证储能元件泄能完全再打开另一通道。然后,将测得的Io和Uo传送到闭环控制器进行比较,并且激活实现较小Io的传输通道,为第2 阶段工作奠定基础。这种模式选择方法无需现有研究中常用的复杂硬件,从而有效地降低系统复杂度。第2 阶段,MFCI 利用无线通信模块从副边传输的Io和Uo实现系统闭环控制。
1.4 MFCI 的电路拓扑与工作原理
如图5 所示,MFCI 电路主要包括全桥逆变器(MOSFET Qa~Qd)、LC 滤波器(电感Lcv和电容Ccv)、变压器(一次侧和二次侧电感Lav和Lbv,互感Mabv)、电流互感器(CTav和CTbv)以及控制单元。根据变压器的T 形等效电路模型,推导出Lv的表达式为
图5 MFCI 的电路拓扑Fig.5 Circuit topology of MFCI
式中,γ 为比例系数,取值范围为0~1。MFCI 工作原理表述如下:不同于传统变压器,MFCI 的变压器采用双侧激励,通过向带气隙的变压器二次侧注入一个与一次侧电流iav频率相同、相位相反的电流ibv,改变ibv实现变压器主磁通可调,从而实现变压器一次侧的Lv连续调节。
2 MCSC 的构型分析与偏移性能
结合第1 部分所述电路拓扑,将MCSC 的工作原理归纳为:当存在水平偏移时,激活发射线圈与切换工作模式,构建均匀空间磁场,保证了互感波动在较宽区域内较为稳定。
2.1 构型设计
MCSC 的结构示意如图6 所示,MCSC 的发射端包括3 个以中心点重合且以120°方式叠层放置的发射线圈a、b、c(注意:不同于常用DD 线圈,图6 中发射线圈相邻部分电流方向相反,确保其具备良好的抗偏移特性),一套用于提升耦合性能的铁氧体磁芯(位于发射线圈a 之下,尺寸与3 个发射线圈叠层放置后基本一致);接收端包括一个方形线圈(尺寸小于发射线圈,有助于提升抗偏移性能),未采用铁氧体磁芯,最大限度确保接收端的轻量化与低成本。结合系统目标需求(充电电流、充电电压、系统效率等),优化设计的MCSC 参数见表1。
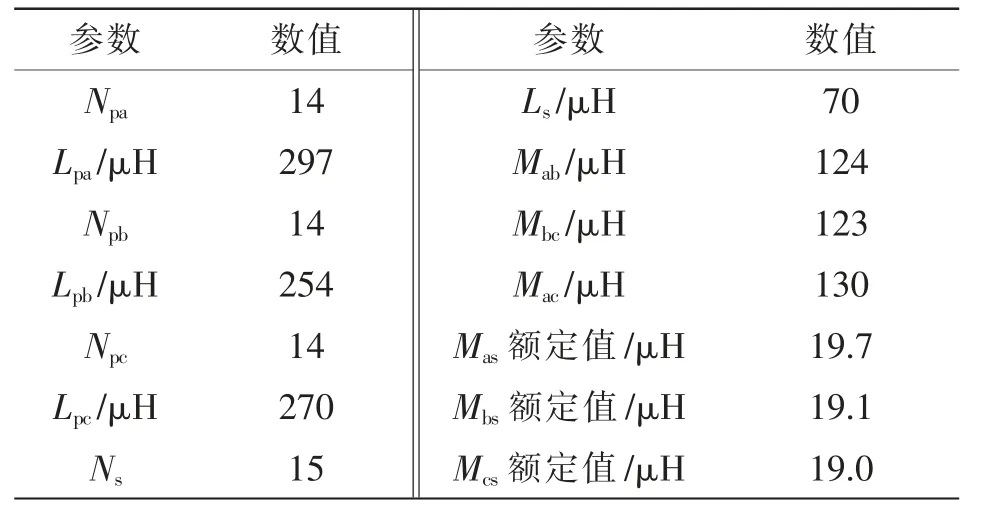
表1 MCSC 的主要测试参数Tab.1 Main test parameters of MCSC
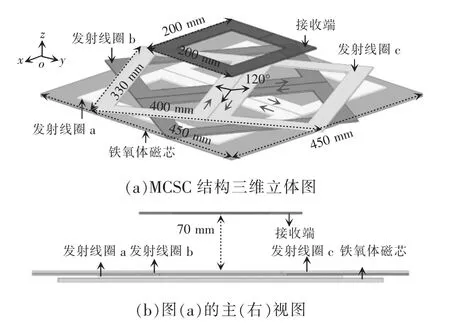
图6 MCSC 的结构示意Fig.6 Schematic of tructure of MCSC
此外,虽然3 个发射线圈之间存在较大的交叉耦合,但是同一时刻仅一个发射线圈工作,另外两个发射线圈处于开路状态。因此,交叉耦合不会影响系统工作性能,避免了采用额外的线圈解耦方法,有效地降低了系统整体复杂度与控制难度。
2.2 偏移性能
实际情况下,发生水平偏移的概率通常大于垂直方向,因此本文重点分析MCSC 在x 和y 轴方向上偏移性能。MCSC 的耦合性能如图7 所示,虽然发射线圈a/b/c与接收线圈分别构成的3 个磁耦合机构均具备较好的单轴方向抗偏移性能,但难以形成较好的全水平方向强抗偏移性能。据此,采用“扬长避短”策略,将3 个发射线圈按照图6 布局并采用图1 的电路拓扑,构造出一个发生水平偏移时互感较为平稳的圆形区域,如图7 中“合成图”所示。此外,对比现有常用磁耦合机构(例如:方形、圆形、DD、DDQ、三线圈等),仅本文所提MCSC 能够实现一个较好的圆形强抗偏移适应区,这正是本文的“自适应电路切换”的核心思想,即从综合优化系统各级拓扑结构,确保最佳工作性能。

图7 MCSC 的耦合性能Fig.7 Coupling performance of MCSC
3 闭环仿真
采用图8 所示PLECS 仿真电路展开闭环仿真研究工作。首先较为详细地阐述了系统闭环控制策略,然后采用仿真结果验证闭环控制器的合理性。
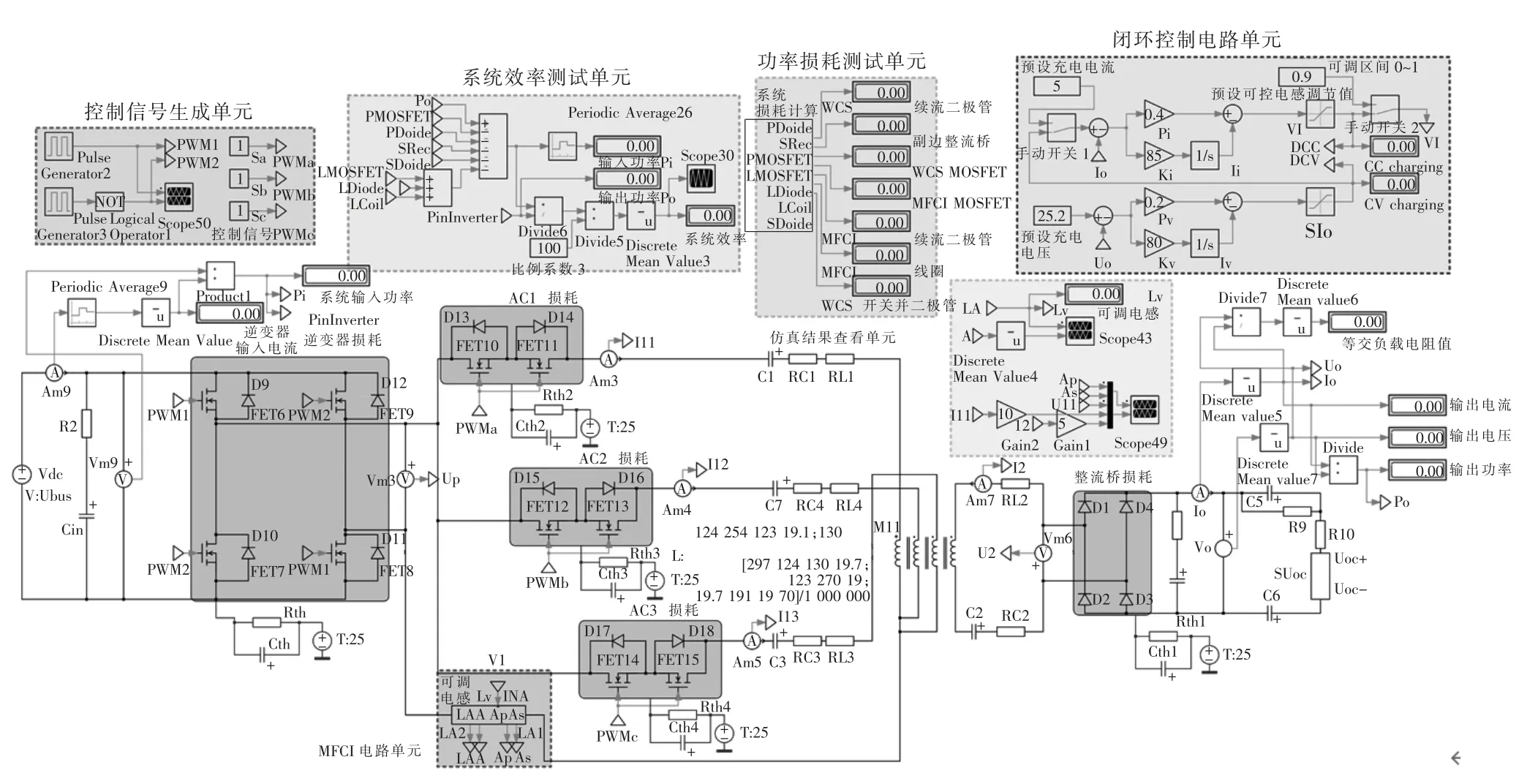
图8 PLECS 仿真电路Fig.8 Simulation circuit in PLECS
3.1 控制框图
如图9 所示,闭环控制框图由模式配置和闭环充电两部分组成。首先,采用Io和Uo激活具备最大互感的传输通道(a、b、c),确保系统高工作性能。其次,系统工作在充电模式,Io和Uo被发送到闭环控制器。一方面,MFCI 中的变压器获取iav,然后将其处理成三角波并与γ 进行比较,为MFCI 的全桥逆变器生成驱动信号;另一方面,双环PI 控制器由充电电流内环和充电电压外环组成,据此生成γ,实现恒流/恒压充电和无线充电系统中全桥逆变器中MOSFET 的ZVS 状态。系统工作在恒流充电模式时,充电电压外环不起作用,等效于单环控制。当系统工作在恒压充电模式下时,采用级联控制;充电电流内环是电压环的内环,充电电压外环的输出被用作充电电流内环的参考信号。与两个独立的电流或者电压控制器相比,双环PI 控制器解决了电流限制问题,具备更快的电流限制响应速度。
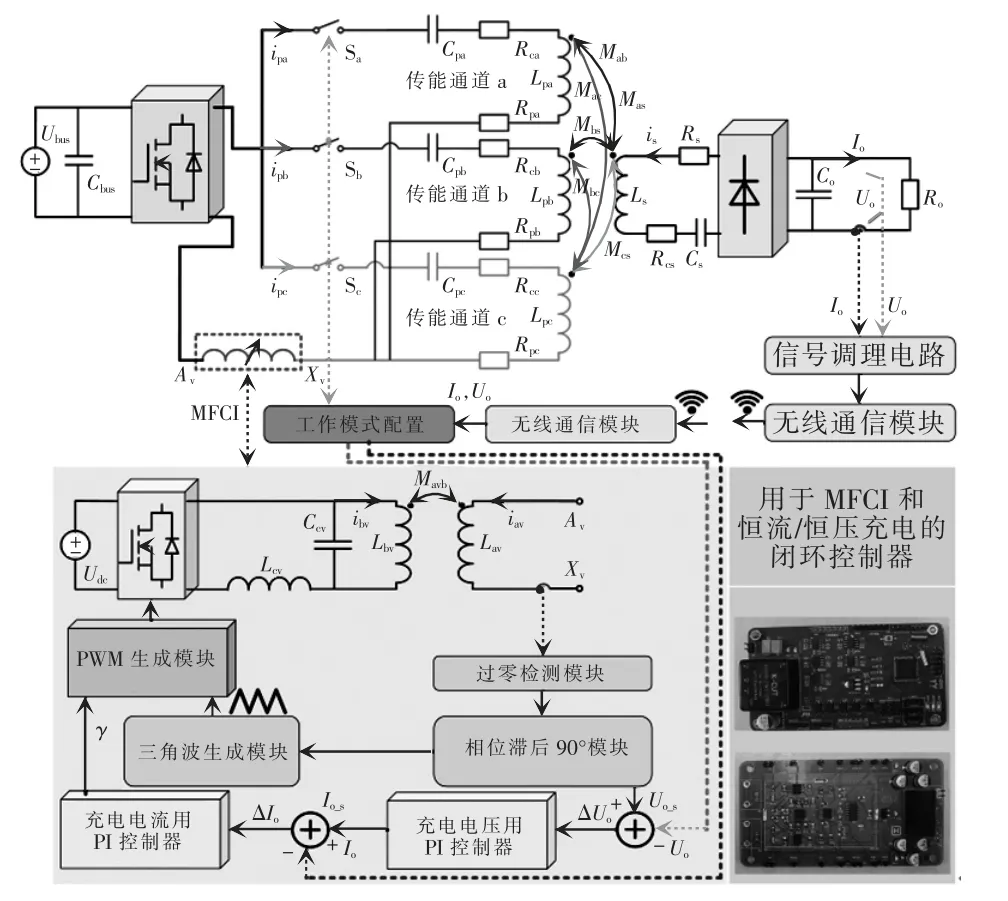
图9 闭环控制框图Fig.9 Block diagram of closed-loop control
3.2 仿真分析
以极限偏移情况(Mp为12.5 μH)为例,恒流/恒压充电仿真波形如图10 所示。
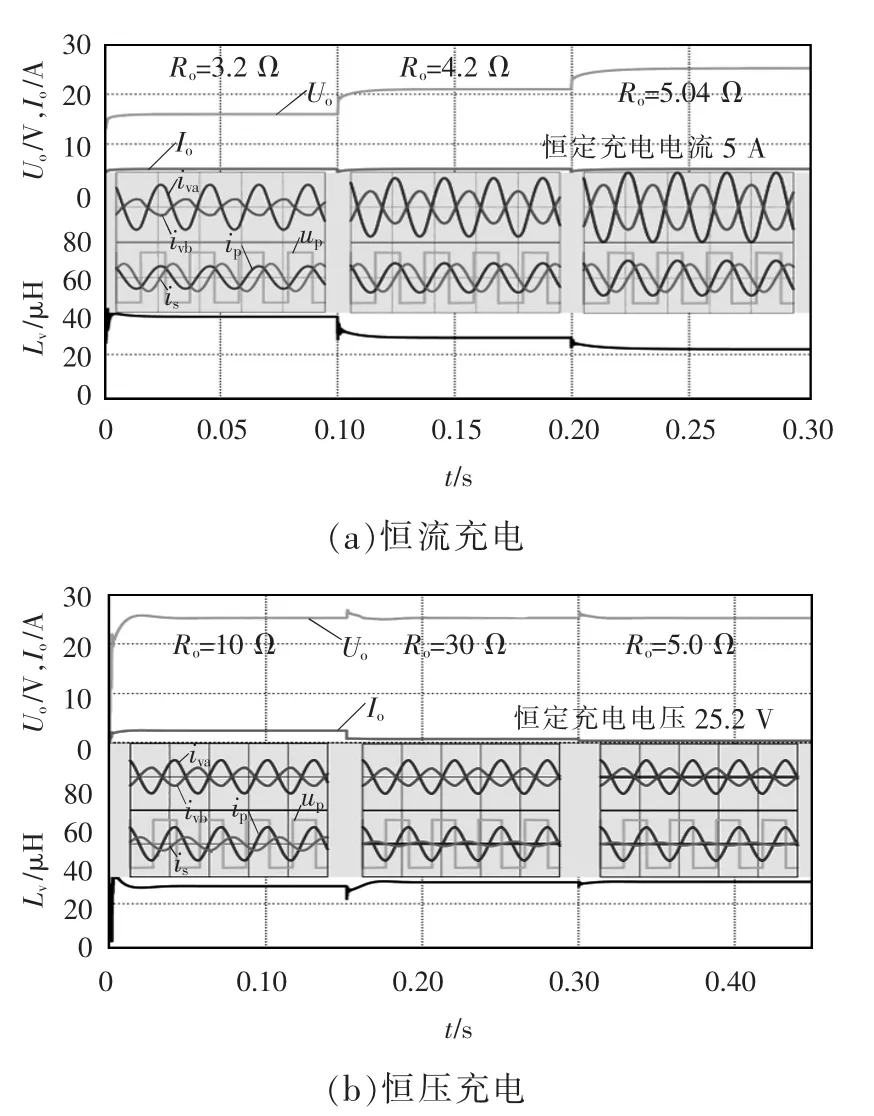
图10 恒流/恒压充电仿真波形Fig.10 Simulation waveforms of constant current/constant voltage charging
由图10 可见,当Ro动态变化时,采用电压电流双环PI 控制器调节MFCI 的Lv实现了预设的充电电流5 A 和电压25.2 V。此外,ip滞后up说明全桥逆变器中MOSFET 实现了软开关状态,有助于降低系统损耗。
水平偏移距离与Lv、α 之间关系如图11 所示,当Ro为5.04 Ω(对应于最大充电功率Po)时,Mp在12.5~21.5 μH 范围内波动(即图中黑色圆环所绕区域),发射端闭环控制器调节MFCI 的Lv,不仅实现了负载恒流/恒压充电,而且保证了全桥逆变器中MOSFET 的软开关状态。同理,上述结论同样适用于其余Ro情况。
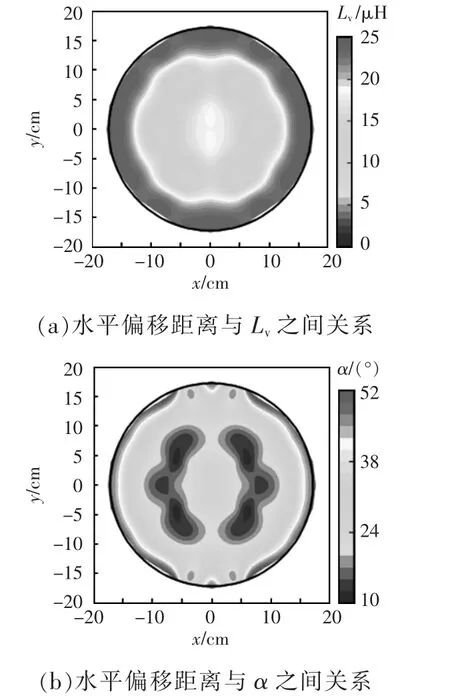
图11 水平偏移距离与Lv、α 之间关系Fig.11 Relationship between horizontal misalignment distance and Lv(or α)
4 实验验证
系统主要参数如表2 所示。结合表1 和表2,搭建如图12 所示的旋翼无人机用无线充电系统样机,通过实验波形和数据验证本文所提方案的合理性与可行性。
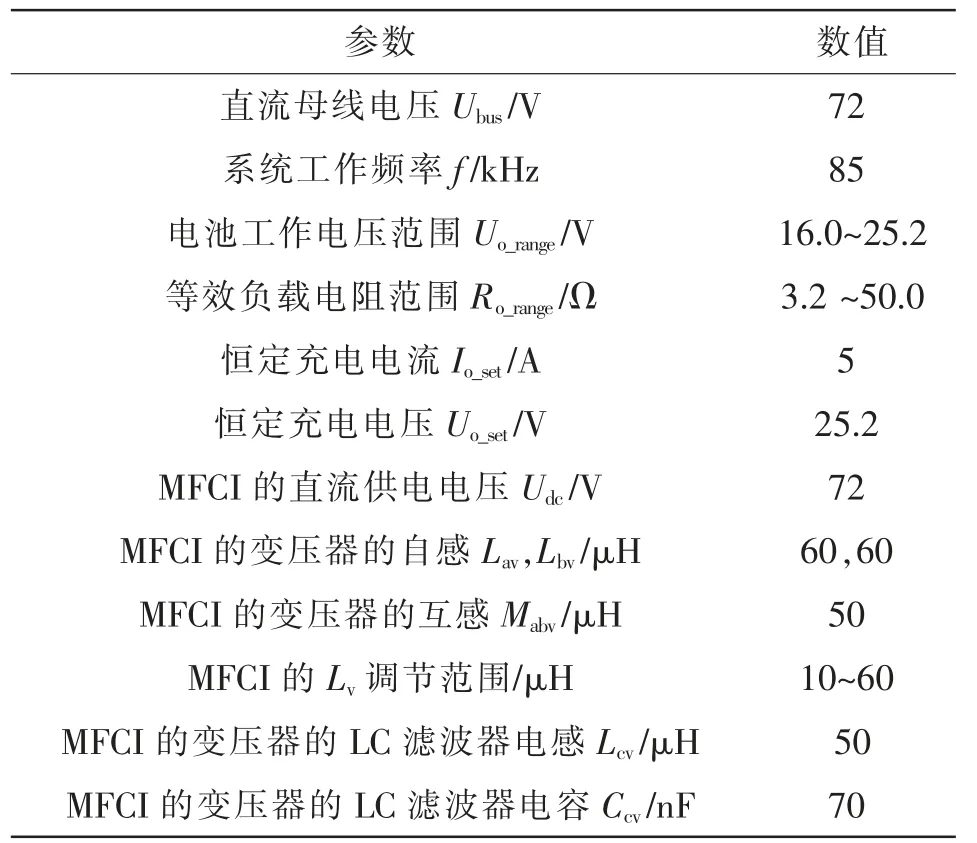
表2 系统主要参数Tab.2 Main parameters of system
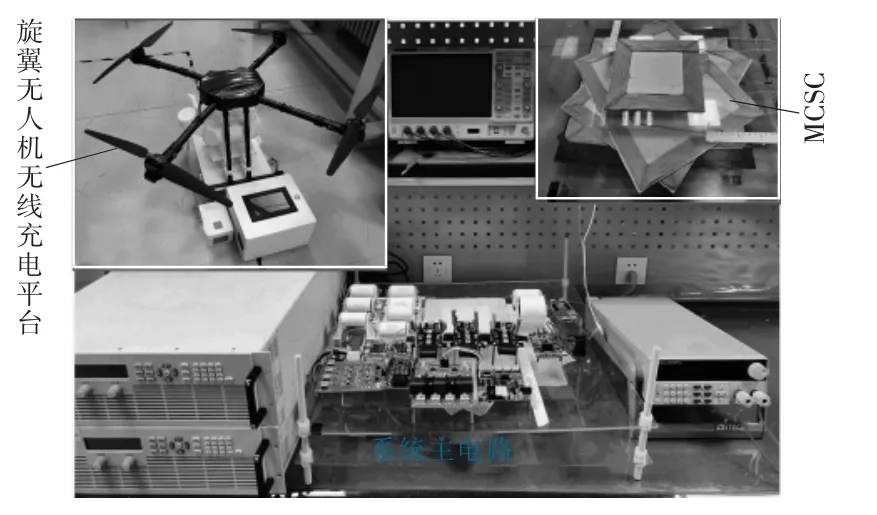
图12 系统实验样机Fig.12 Experimental prototype of system
4.1 实验装置
图12 中,全桥逆变器用MOSFET 的型号为英飞凌公司IPW60R017C7,半桥驱动芯片为TI 公司UCC21520;串串补偿拓扑采用DAWNCAP 公司薄膜电容;MCSC 的利兹线型号为0.05 mm &1 000股,锰锌铁氧体型号为PC95;整流桥采用ON 半导体公司肖特基二极管NTST30120CT;发射端控制器采用STM32F405RGT6;无线通信采用WiFi 模块ATK-ESP8266;直流电压源采用KEYSIGHT 公司N8944A;直流电子负载采用ITECH 公司IT8513C。
4.2 实验结果
闭环实验波形如图13 所示,当Mp为12.5 μH时,调节Lv实现Ro动态变化时恒流充电(5 A)和恒压充电(25.2 V),并且全桥逆变器中MOSFET 实现了ZVS 状态。在此基础上,Mp在12.5~21.5 μH且Ro在3.2~50 Ω 范围内变化时,本文设计的闭环控制器均能实现恒流/恒压充电。
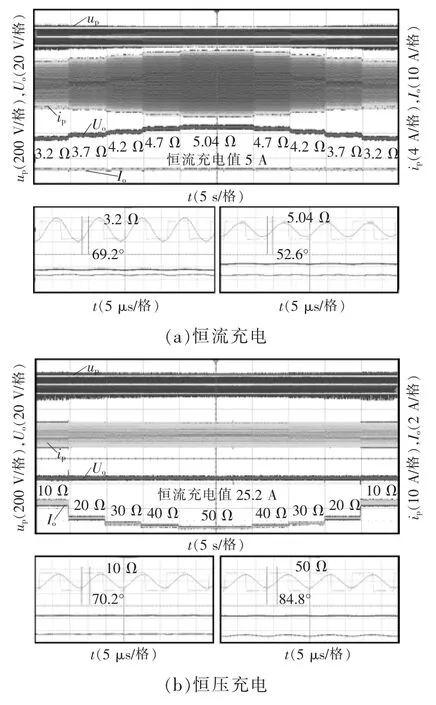
图13 闭环实验波形Fig.13 Closed-loop experimental waveforms
系统效率η与水平方向偏移之间关系如图14所示,当Ro为5.04 Ω(对应于最大Po,即126 W)且系统效率η 大于85%时,水平偏移范围为黑色圆环所绕区域,并且最大η 为91.8%。
4.3 文献对比
考虑到各种设计目标,不同的磁耦合器在技术上各有其优势,这就意味着无法进行绝对公平的比较。因此,如表3 仅对与本文工作相关的一些关键指标进行了比较,表中Δx(Δy)为沿x(y)轴方向的偏移距离。与文献[1]、[4]和[5]中的方法相比,MCSC的结构更简单,更容易制造。与文献[2]和[3]中的方法相比,MCSC 的结构设计和参数优化更加方便。与文献[6]和[7]中的方法相比,MCSC 在综合水平失配性能方面表现更佳。需要指出:在设计磁耦合器时应考虑结构复杂性与耦合性能之间的整体平衡。例如:如果MCSC 中接收器使用铁氧体芯,可进一步提高其抗失配能力,但这与轻量化需求相矛盾。

表3 对比分析现有若干文献Tab.3 Comparison among some existing references
5 结语
本文提出了一种采用多个传能通道切换的可重构无线充电系统,实现了等效负载电阻变化时较宽水平偏移范围内恒流/恒压充电与ZVS 状态。分析了系统可重构电路拓扑及其工作原理,根据等效电路模型推导了功控用核心公式。一方面,阐释了采用发射线圈最小谐振电流检测实现系统模态配置的工作机理;另一方面,分析了MFCI 的拓扑结构及其等效电感调控原理,为系统闭环控制提供件载体。从耦合机构角度出发,构造了与系统电路拓扑适配并且采用多叠层线圈对单一接收线圈的MCSC,分析其耦合性能的基础上,阐释其优异的水平抗偏移性能。从闭合控制角度出发,阐述系统工作流程,优化设计原边控制器,采用PLECS 仿真软件验证了充电控制的可行性。最后,搭建了一套旋翼无人机用无线充电系统样机,实验结果表明本文所提方法的可行性。同时,本文所提可重构无线充电系统适用于对接收端轻量化和紧凑化、水平偏移性能等要求较高的场合。