定时自动林蛙驱赶器的制作
2023-11-04张力凡苗婷婷索长宏郭琼瑶王如鹏赵玉敏朱俊义
张力凡,苗婷婷,索长宏,郭琼瑶,王 泽,王如鹏,赵玉敏,朱俊义
在东北林蛙(Rana dybowskii)全人工养殖过程中,由于林蛙的运动量减少,致使其腿部肌肉不发达,腿变得比较短,同时,长时间聚集在一起,产生的粪尿不易快速蒸发变干,容易导致疾病的发生[1-3].人们已对东北林蛙人工养殖过程中的环境条件开展了相关的研究.蝌蚪变态初期,尾巴还没有完全消失,呼吸变为肺呼吸,为适应陆上活动,圈舍四周摆放树枝、稻草和瓦等隐蔽物,以备蝌蚪上岸栖息[4].一般光照时间会对东北林蛙的生长发育造成明显影响,各组分间除变态率外,孵化率和体重等方面均呈现先增大后减小的趋势[5].温度是影响东北林蛙出蛰存活和生长的重要因素,出蛰期间温度缓慢提高有利于东北林蛙生长和存活[6].如何让东北林蛙处于一种经常的运动状态,保证东北林蛙的腿部肌肉发达,同时减少林蛙聚集时间,保持荫凉干燥环境,减少疾病的发生,对东北林蛙全人工养殖至关重要.因此,本文研究制作了定时自动林蛙驱赶器,不仅可以保证东北林蛙的全人工养殖质量,而且可以为驱赶器的推广提供实践基础.
1 定时自动林蛙驱赶器的结构及连接
蛙棚内安放固定的滚筒电机,滚筒电机连接滚筒电机轴,滚筒电机轴上间隔缠绕有两根以上绳索,每根绳索连接动滑轮后在另一端固定,动滑轮再与带有遮阴物的横梁连接.
在蛙棚内长轴线两侧棚顶,对称固定多个滑轮,滑轮数量依据养殖区长度及棚顶钢梁位置而定,每个滑轮间距4~6 m.滑轮的位置在一条直线上,每个滑轮连接有绳索,每根绳索的一端共同与一个横梁连接,横梁采用钢管,绳索选用钢丝绳.横梁下带有遮阴物,遮阴物是带有树叶的树枝.每根绳索另一端分别与滚筒电机轴连接,滚筒电机轴与滚筒电机连接.滚筒电机轴的长度与蛙棚的宽度相同.将带有滚筒电机的滚筒电机轴横向固定在蛙棚的中央位置.共设置四组横梁,如图1 所示.
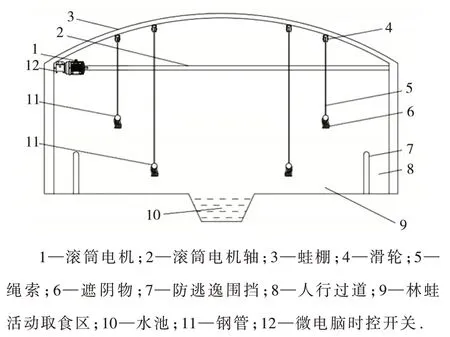
图1 蛙棚横向剖面图,示定时自动林蛙驱赶器的结构及连接
通过微电脑时控开关,定时启动滚筒电机带动滚筒电机轴转动,引发固定在其上的绳索卷起或展开,从而使绳索固定的钢管升起或下降,当钢管升起时,躲藏在该钢管遮阴物下面的林蛙就会自动躲到另一根钢管遮阴物下面,在这一过程中升起的钢管下面的林蛙粪尿会被晒干.同时,林蛙也有运动过程,可定时自动保持升降,如图2、图3 所示.
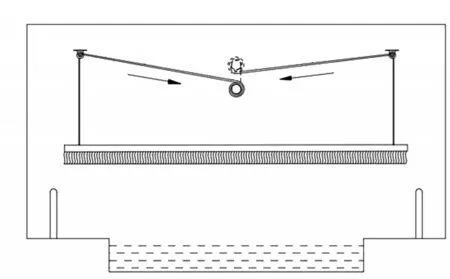
图2 蛙棚侧向剖面图,示定时自动林蛙驱赶器升起状态
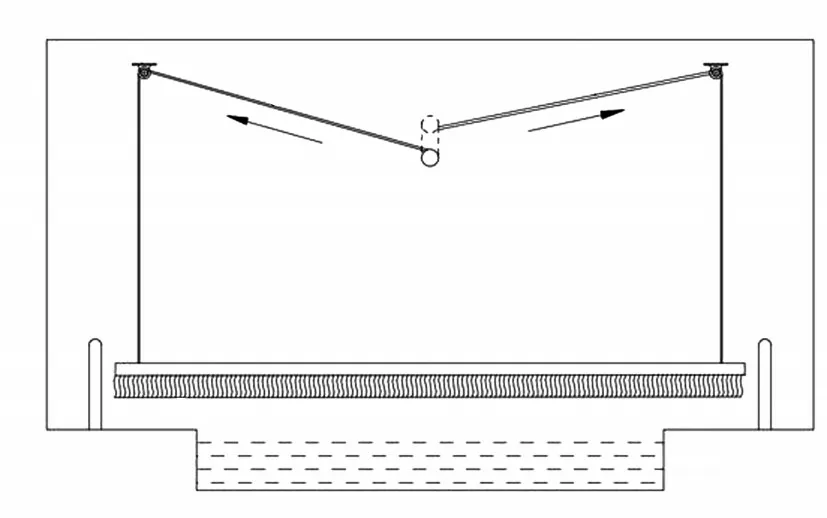
图3 蛙棚侧向剖面图,示定时自动林蛙驱赶器下降状态
2 定时自动林蛙驱赶器的电路图
本装置电路图如图4 所示,供电电源采用单相交流220 V 50 Hz 供电,装置核心控制元件包含2 个微电脑时控开关,分别是KT1 和KT2,两个交流接触器,分别是KM1 和KM2.装置的控制采用定时自动控制方式,通过设置微电脑时控开关1 和微电脑时控开关2 的参数,进行自动控制,控制流程如下:微电脑时控开关可以按照周进行参数设置,每天可以设置多个时间段,控制方式分为手动控制和自动控制两种模式,当系统设置时间达到微电脑时控开关1 设定参数时,微电脑时控开关有源触点输出,控制电路KM1 线圈得电,KM1主触点吸合,电机正转,带动外层装置下降,同时内部装置上升,为下次升降做准备,当系统设置时间达到微电脑时控开关2 设定参数时,微电脑时控开关2 有源触点输出,控制电路KM2 线圈得电,KM2 主触点吸合,电机反转,带动内层装置下降,同时外层驱赶装置上升,为下一次升降做准备.这样按照设定时间进行周期性运行,在装置的升降过程中,使林蛙处于间隔的运动状态.
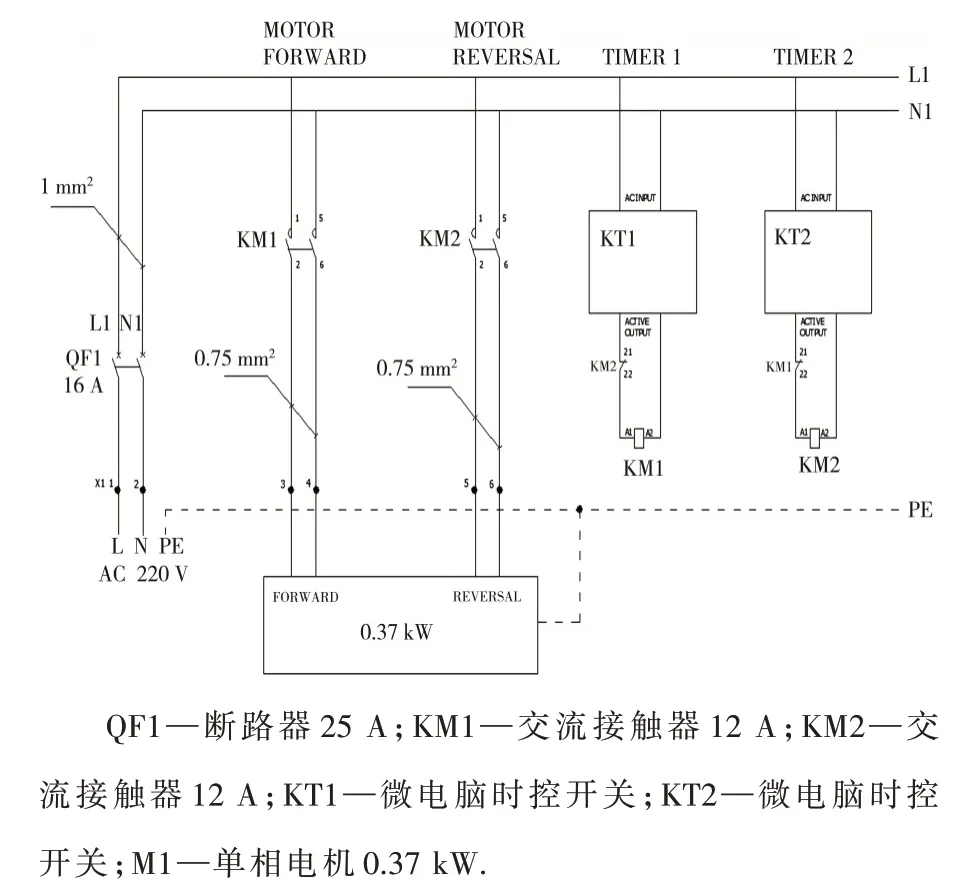
图4 定时自动林蛙驱赶器的电路图
3 讨论
以上研究仅是针对林蛙生长某一时期开展的实验室内研究,真正在生产中对如何实现林蛙生长的最佳环境条件,保证林蛙处于运动状态,减少疾病的发生的研究比较少、中国实用新型专利“林蛙生态养殖蛙棚”,在蛙圈的林蛙取食活动区上方,沿蛙圈长度方向两侧围栏之间架设横杆,横杆两端与围栏上钢管人为推动滑动连接,横杆上悬挂有一定高度的不伤害蛙体的柔软材料,通过人为推动,可使林蛙运动,但该种装置操作不便[7].本文研究结果利用物理学的动力学原理,保证了林蛙变态登陆期、幼蛙生长期、出蛰上岸期、成蛙生长期的荫凉干燥清洁环境,以全自动方式使得林蛙一直处于运动状态,预防了疾病的发生,并且以全自动方式调控驱赶器升降,对开展东北林蛙全人工养殖的数字化管理意义重大.
