基于AHP/AD/TRIZ的球形水果包装机设计
2023-10-24王仁忠
左 斌 王仁忠 王 敏
(苏州市职业大学机电工程学院,江苏 苏州 215104)
随着中国苹果、柑橘等球形水果种植面积的扩大,球形水果产量也持续上升。为降低运输过程中受损率,采摘后需及时对水果进行包装,而针对此类水果的自动采摘包装机技术还不成熟,目前仍以手工采摘和手工包装为主,难以满足高效的作业要求。经调查[1],市面上高档礼盒水果包装更多采用泡沫网兜,但泡沫网兜具有弹性大、网孔多的特点,在包装过程中不易固定和成型。
层次分析法(Analytic hierarchy process,AHP)是一种定性与定量分析相结合的多目标决策分析方法[2],该方法可用于用户需求分析,通过将复杂问题分解量化从而获得用户需求权重;质量功能展开(Quality function deployment,QFD)是以用户需求为依据,通过用户需求和设计要素构建质量屋,以获得关键设计要素的设计方法;TRIZ理论是通过对大量专利和创新方案进行分析而得出的创新解决问题方法,常用于解决设计中的冲突问题。李小彤等[3]运用QFD构建质量屋,实现了用户需求与设计要素间的转化,有效解决了筒纱包装生产线造型设计问题。张彩丽等[4]利用QFD/TRIZ集成,使设计过程变得科学合理,最后形成了概念创新方案。李晓杰等[5]通过AHP进行用户需求分析,满足了客户需求;运用TRIZ解决了设计过程中的矛盾冲突,提升了产品的高效与智能。苏建宁等[6]运用AHP/QFD/TRIZ对玫瑰花蕾采摘机进行设计,提高了采摘机关键部件的可靠性,同时构建了产品优化设计流程。目前,将AHP、QFD、TRIZ 3种理论融合应用于产品设计中的研究较多,而采用AHP、AD、TRIZ 3种理论的产品设计应用较少。多学科理论方法的结合可精准掌握客户需求,使设计方法科学化,设计结果可行化。针对现有球形水果包装设备的现状,研究拟采用AHP对用户需求权重进行分析,获得重要设计要素,引入AD与TRIZ形成设计方案,以满足使用发泡网对球形水果进行自动包装的需求,以期为解决使用发泡网对球形水果自动包装问题提供依据。
1 融合AHP/AD/TRIZ的产品设计流程
公理化设计(Axiomatic design,AD)是一种改善现有设计或创新设计的逻辑性强的思维方法,以指导设计者作出更好的决策;其主要遵循信息公理和独立公理两个原则[7]。设计者在设计过程中可通过AD公理作出科学的决策,使设计过程更优化。但AD公理在单独使用时还不够完善:① 在实施用户域、功能域映射过程中,AD缺乏确切的指导原则和具体的分析工具,导致无法区分各项设计需求的重要程度。若将AHP分析得到的用户权重转化为功能需求,通过建立AD功能域与物理域的映射可得出设计参数集,因此将AD和AHP两者结合可以更明确客户各项需求。② 虽然AD的独立性原则在映射过程中能给出方案可行性的评判依据,但未提供理想且具体的解决方案[8],而TRIZ发明问题解决理论能够给AD提供一系列分析问题、解决问题的方法,因此,在AD公理化设计中融入TRIZ发明问题解决理论,可优化初始设计方案并给出具体解决方案。
在AHP用户需求分析的基础上,融合AD、TRIZ理论,形成产品设计流程(见图1)。
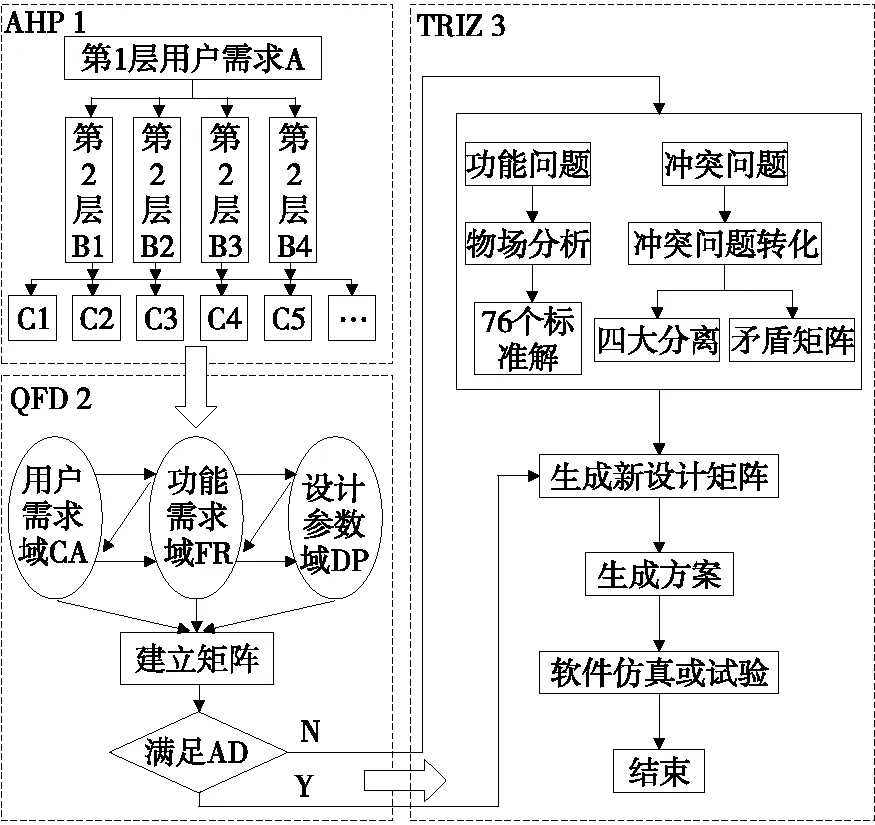
图1 融合AHP/AD/TRIZ的产品设计流程
(1) AHP确定用户需求。通过深度访谈、问卷调查等方式对用户需求进行调研,对调研结果进行筛选、组合,构建用户目标需求层次,建立用户需求关系矩阵,并通过几何平均法计算出用户需求权重值,权重高的即为关键设计要素。
(2) AD构建初始设计矩阵。根据AHP的用户需求分析,选取权重高的关键设计要素定义为功能组,建立功能域,然后将功能域映射并求解出设计参数的物理域,构建出初始设计矩阵。利用AD独立公理原则判断初始矩阵是否为耦合矩阵,若为非耦合矩阵则满足独立公理,反之,则需进行解耦设计。
(3) 利用TRIZ解耦完善设计方案。若初始设计矩阵为耦合阵,则表明原始设计存在缺陷,此时需运用TRIZ工具[9]进行解耦,获得新的设计参数矩阵,生成新设计方案。然后,通过软件构建三维模型,进行运动学仿真,确定运动合理性。最后,通过科学的试验方法寻求最佳的试验参数,进行样机试验,验证方案可行性。
2 水果包装机设计
2.1 用户需求权重分析
通过对市场上球形水果包装需求的调查以及客户对现有水果包装机使用感受的访谈发现,用户对包装机的主要设计需求为自动包装、分离包装、安全可靠、效率高、人工劳动量低等。对用户需求进行筛选和分类,确定用户需求三层级目标:主要功能、次要功能、人机需求、外观需求。建立球形水果包装机用户需求模型如图2所示。
(1) 构建判断矩阵。根据用户需求层次模型,对3个层次的需求目标两两间相互比较,按照1~9标度方式,一般取值为1,3,5,7,9,1/3,1/5,1/7,1/9,也可取上述中间值,标度的大小体现了两两目标间的重要等级[10]。试验邀请专家对需求目标进行评估打分给出具体的赋值,构建判断矩阵元素:
A=(aij)m×n,
(1)
式中:
aij——第i个元素与第j个元素重要度比较。
因此,第二层次用户需求B相对于第一层次用户需求A判断矩阵为:
(2) 计算各指标权重。用户需求层次判断矩阵构建后,利用几何平均法对各指标进行权重求解。
首先对判断矩阵每行数据乘积的n次方根求解:
(2)

对式(2)进行归一化处理,得各指标权重:
(3)
故,ω=(0.459 4,0.324 8,0.149 1,0.066 7)T。
(3) 求解最大特征根。利用判断矩阵A与各指标权重ω构建特征方程,通过特征方程求出最大特征根λmax。
AW=λmaxW。
(4)
因此,λmax=4.104 1。
(4) 一致性检验。为避免需求层次权重出现相对矛盾的情况,需进行判断矩阵一致性检验。当CR<0.1时,表示各层次指标构造合理,通过一致性检验。若不满足,则需重新赋值调整判断矩阵。
(5)
式中:
CI——一致性检验指标;
CR——一致性指标比例;
RI——随机一次性指标。
经计算,CI=0.034 7,查平均随机一次性指标得RI=0.90[11],CR=0.038 6<0.100 0,一致性检验通过。
同理,计算出第3层次用户需求C相对于第2层次用户需求B判断矩阵为:
通过几何平均法对各子层次指标进行权重计算,得到所求的单排序权重,同时对判断矩阵进行一致性检验,确认构建的判断矩阵是否合理,如表1所示。
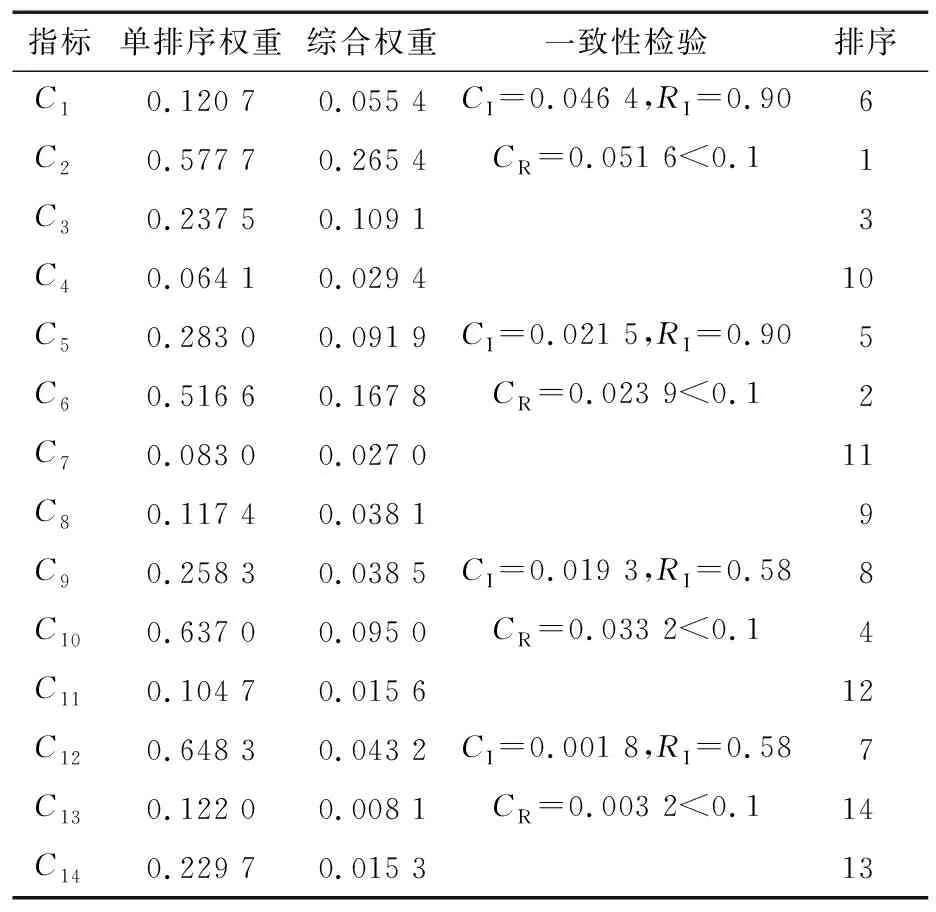
表1 各层次需求权重及一致性检验
表1中的每个子层次综合权重由用户总需求权重乘以对应的子需求权重获得,根据综合权重值对每个子层次元素进行排序,得到需求高的子层次元素为:B1下的自动包装C2、输送发泡网C3;B2下的分离包装C5、辅助包装C6;B3下的安全可靠C10。因此,零部件设计参数主要从这些重点部件展开。
2.2 设计参数确定
2.2.1 建立功能需求集FR 将AHP分析得到的权重较高的元素转化为功能域中的功能需求集,建立水果包装机的功能需求集:
(6)
2.2.2 建立设计参数集DP
(1) 设计参数DP1求解。自动包装在整机中属于核心部件,要实现“自动包装FR1”功能,控制系统会控制导向板引导水果进入发泡网,可选择齿轮传动机构。为使发泡网包装均匀美观,可增加两套动力装置控制两个导向板,确保其调整角度相等,但两套控制装置会使机构操作性降低,此时“形状和操作性”产生冲突[12-13]。因此,根据TRIZ的技术矛盾工具可归纳为:改善No.12形状参数和恶化No.33可操作性参数。通过查阅TRIZ矛盾矩阵表,初步得到3种可行解决思路:32颜色改变,15动态特性和26复制。再结合齿轮传动的实际情况,筛选出“发明原理26复制”来解决设计冲突,即将一个导向板中的锥齿轮复制至另一侧。故设计参数DP1:锥齿轮包装机构(见图3)。
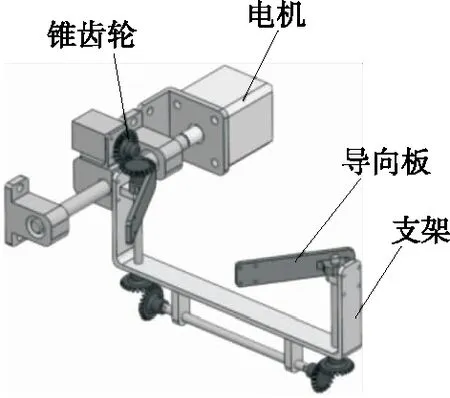
图3 锥齿轮包装机构
(2) 设计参数DP2求解。爪头是将发泡网从原始的扁平状态变为张开状态的机构,是辅助水果包装的重要部件,爪头的动作是一个往复的直线移动,常选用带有移动副的连杆机构、直线气缸、螺旋机构等。由于连杆机构易产生动载荷且效率低,由此排除连杆机构。直线气缸适用于行程固定的场合,但水果大小不一故将其排除。螺旋传动不仅可实现爪头稳定工作,而且可完成不同行程的工作;将螺旋传动的螺杆两侧设计为相反螺纹时,还能实现爪头间的相对运动。故设计参数DP2:螺旋辅助机构(见图4)。
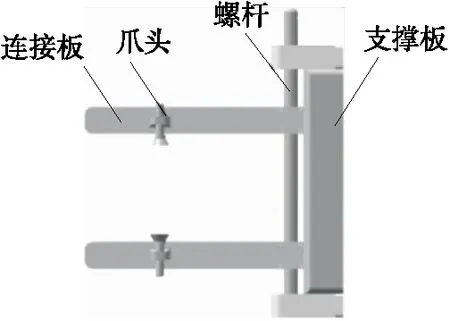
图4 螺旋辅助机构
(3) 设计参数DP3求解。“分离包装FR3”功能的实现主要由切袋装置实现。常见的切袋装置是由切刀和刀砧做相对运动完成材料的切割,故切刀移动装置固定在竖板上,切刀通过丝杠螺母结构实现上下运动。设计参数DP3:切刀分离机构(见图5)。

图5 切刀分离机构
(4) 设计参数DP4求解。“输送发泡网FR4”是发泡网平稳输送的关键功能。为满足发泡网在输送过程中稳定传输,常选用皮带传动,并通入负压将材料紧贴在皮带上,但镂空透气的发泡网无法紧贴于传送皮带,不适用于负压传递。因此考虑采用张紧轮来增加摩擦力实现材料与皮带的紧贴。张紧轮压力过大,发泡网受摩擦力影响无法向前传输;张紧轮压力过小,摩擦力不够,无法使材料紧贴于传输皮带,此时“压力过大和过小”产生冲突。因此,根据TRIZ的物理矛盾:归纳物理冲突的参数是压力,既不能太大也不能小。应用“发明原理16未达到或超过的作用”来解决,具体可在张紧轮后方增设弹簧,依据材料特性自动调节弹簧的张力,从而很好地解决了张力不能过大也不能过小的冲突,即确定设计参数DP4:张力控制机构(见图6)。
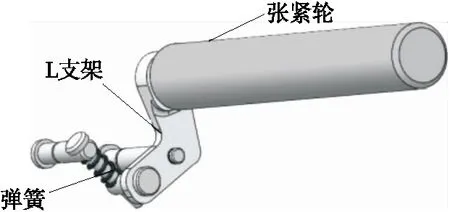
图6 张力控制机构
2.2.3 构建原始设计矩阵 基于球形水果包装机的功能需求,将功能需求FR中的4个变量参数映射到设计参数DP,得到两者之间的表达式:
(7)
因包装机工作时,辅助包装与分离包装的运动相关联,则设计参数DP2和设计参数DP3是相关的。FR1的功能实现需要设计参数DP1和设计参数DP2共同作用,两者有关联。故设计矩阵A见式(8),其中,元素表示FR到DP对应两元素间的关联程度,X表示两元素关联紧密,0表示两元素弱关联或无关联。该矩阵是一个耦合矩阵,不满足AD要求,需进行解耦设计。
(8)
2.3 解耦设计
(1) 消除A23和A32间的关联。辅助包装是通过电机驱动螺杆,螺杆带动爪头完成发泡网的打开和闭合。分离水果的切刀也是通过丝杠螺母结构实现上下运动,为了消除A23和A32的影响,增加两套动力组件即可实现,但会使装置变得复杂且成本增加。因此,根据TRIZ的技术矛盾归纳为:改善No.27可靠性参数和恶化 No.36设备复杂性参数。查阅TRIZ矛盾矩阵表,得到1分割,13反向和35参数变化3种序号的发明原理解决方案。选择“发明原理13反向”来解决矛盾,即增加一对外啮合齿轮,通过一套动力组件即可分别实现水果包装与分离包装的功能要求(见图7)。
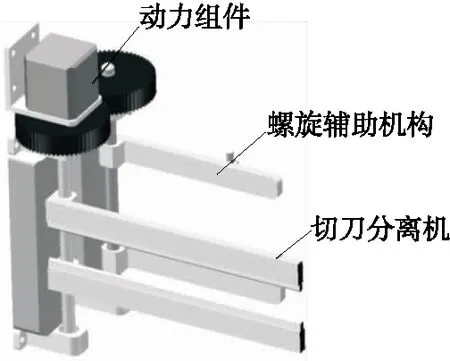
图7 解耦设计方案
(2) 消除A12。根据TRIZ的物理矛盾可知,锥齿轮机构和反螺旋机构在时间上存在矛盾,可以采用分时段完成不同的动作,使得A12=0。
2.4 方案生成
原始矩阵中的A12、A23和A32消除后,原始矩阵就变成非耦合矩阵B。由独立性公理可知,该方案可行,其球形水果包装机整体方案如图8所示。储料盘上的发泡网以S型轨迹绕过导向轮,进入传送带模块后,通过张紧轮整形发泡网,输送至爪头下方,当接近开关感应到发泡网时会驱动爪头拉开发泡网,同时驱动切刀分离发泡网;下果管中的传感器检测到水果下落时,电机驱动锥齿轮包装机构向发泡网方向前进,随后调整导向板角度,方便水果进入发泡网,直至水果完成包装。
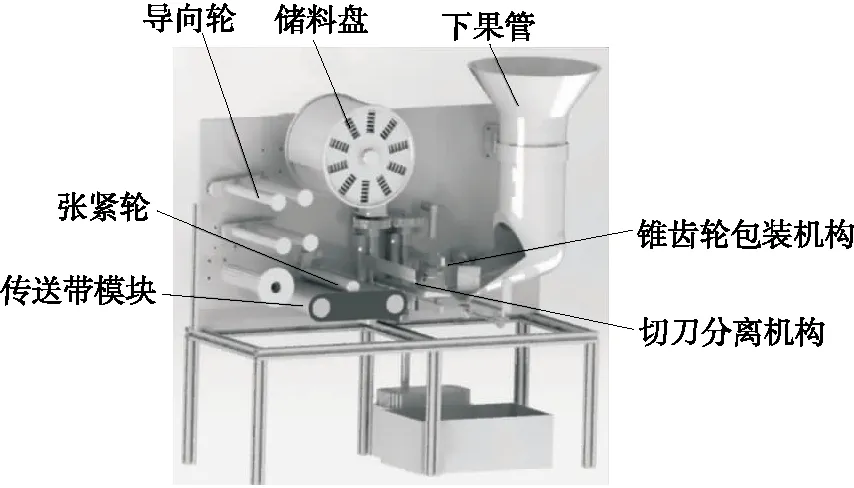
图8 球形水果包装机整体方案
2.5 锥齿轮包装机构运动分析
为进一步验证设计方案可行性,拟建立锥齿轮包装机构的有向模型,并结合图论方法对包装机构进行运动学分析,求得各构件的速度表达式。为便于分析包装机构的位置关系,建立OYZ平面内的机构简图[图9(a)],其中活动构件的编码为1、2、3、4,低副编码为a、b、c、d,高副编码为e、f、g,两个导向板间距为L,单个导向板长度为S。根据图论学中的有向图构建方法对其包装机构进行有向图构建[图9(b)]。

图9 包装机构简图及有向图模型
有向图模型中的节点表示构件,有向边表示两构件形成的运动副,其中低副用实线表示,高副用虚线表示,如果有向边的节点位于箭头处时,对应的参数设为1,有向边的节点位于箭尾处时,对应的参数设为-1,其他参数为0,构建其边—节点矩阵C。
(9)
由式(9)可知,C矩阵中各行都是相互独立的,所以C矩阵可以分成实线边—节点矩阵C0和虚线边—节点矩阵C1,即C=[C0|C1]。即C1为:
(10)
根据有向图中的实线边—节点生成树并构建路径矩阵G,矩阵G中的元素赋值规则:有向边由节点0指向其他节点,赋值-1,由其他节点指向节点0,赋值-1,其他有向边赋值0。
(11)
因此,树矩阵T可以通过矩阵C1与路径矩阵G获得:T=C1TGT。
(12)
根据图9(b)可知,有向边e、a、b构成了基本回路Me,有向边f、b、c构成了基本回路Mf,有向边g、c、d构成了基本回路Mg。基本回路中的空间位置系数Pij由各构件的基本直径确定,若各构件的基本直径为di(i=1,2′,2″,3′,3″,4),则构成的空间系数:
由式(12)得出的树矩阵T与空间位置系数Pij可求得机构中各构件的相对角速度:
(13)
(14)
进一步得出导向板的开膜位移
(15)
当导向板间距L=240 mm,导向板长度S=120 mm,得出Δy的曲线图(图10),当构件4转动角度越远离90°时,开膜位移越大,反之越小。当θ4=150°,L与S同时变化时,开膜位移Δy与L和S的曲面图,如图11所示。
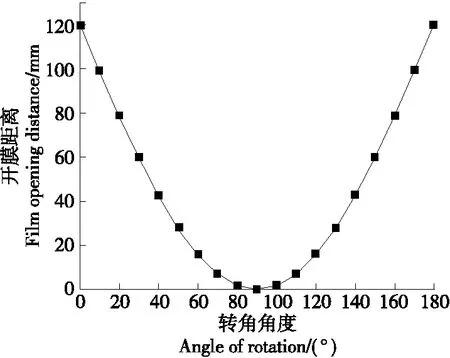
图10 开膜位移曲线图
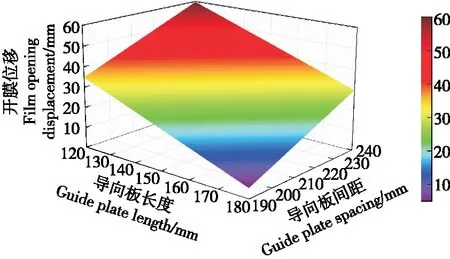
图11 开膜位移曲面图
为保证水果顺利进入泡沫网兜,可通过合理选择S与L值来控制开膜位移Δy大小;当L=240 mm,S=120 mm,θ4=150°可满足水果直径为100 mm的包装要求。
3 试验验证
3.1 试验指标及方法
为验证水果包装机的工作性能及可行性,以包装成功率为性能开展相应的样机试验,试验对象为市面上采购的成熟度一致且表面无损伤的苹果,经测试样品水果直径为(100±8) mm,水果高度为(85±6) mm。采用正交试验,选择包装前进速度、下果管角度、开膜距离为试验因素,正交试验因素水平见表2,试验设计及结果见表3。
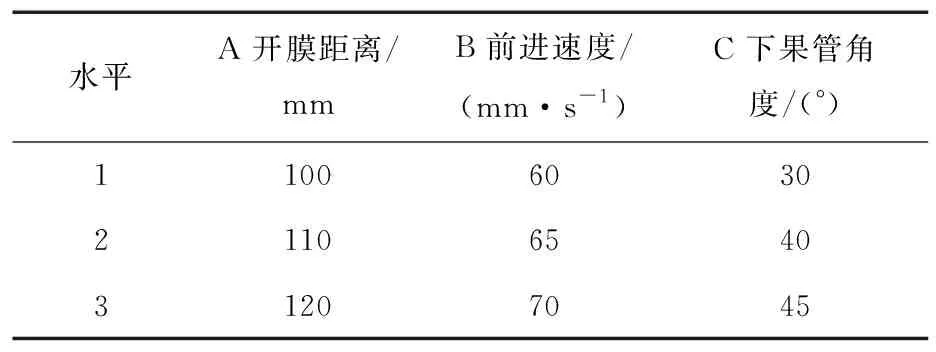
表2 因素水平
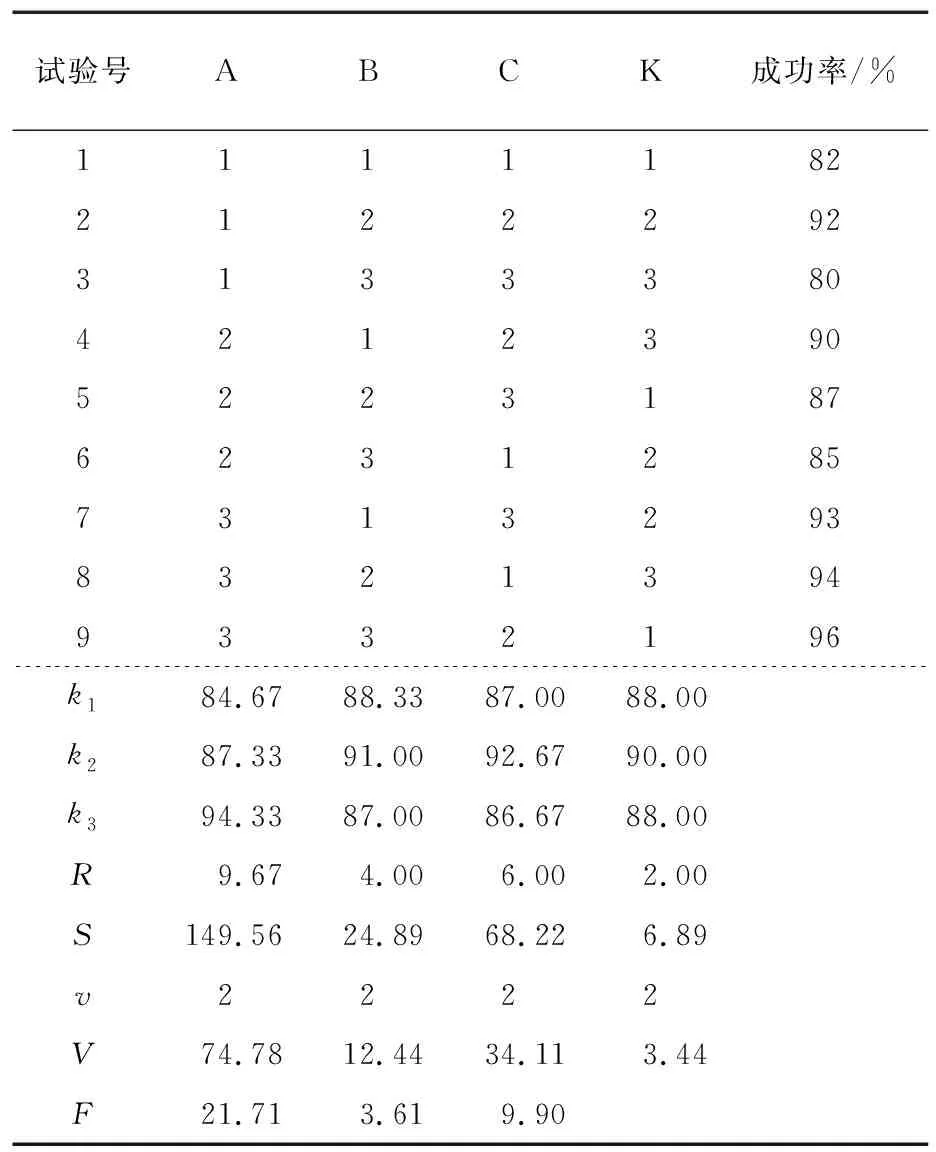
表3 包装机试验方案及结果
3.2 结果及分析
由表3可知,开膜距离对包装成功率的影响最大,前进速度对包装成功率的影响最小;最佳的因素组合为开膜距离120 mm、下果管角度40°、前进速度65 mm/s(A3C2B2)。同时,由F(α=0.05)检验临界值[14]及方差分析可知,A对包装有显著影响。以最佳因素组合进行水果包装试验,每次包装10个水果,均能顺利完成水果包装(n=10)。由于锥齿轮包装机构的导向板与水果直接接触,导致部分水果有轻微的损伤,其损伤率为5%,脱落率为3%,水果包装成功率为92%。
4 结论
研究提出了一种以用户需求为驱动,基于AHP/AD/TRIZ的产品设计方法,构建了基于多方法融合的产品设计流程,运用多方法融合的产品设计流程对球形水果包装机进行设计,通过选取包装机构的开膜距离、前进速度、下果管角度为试验因素进行包装机正交试验,获得最佳试验组合为开膜距离120 mm、下果管角度40°、前进速度65 mm/s。试验结果与运动分析结果一致,满足球形水果包装要求,进一步验证了包装机方案的可行性。由此证明,以用户需求为驱动的多方法融合的设计流程可为相关新产品开发提供参考,后续可将机器视觉技术运用至包装机中,增加对不同种类、不同形状水果的筛选功能,从而形成一套多品种水果智能包装机。
