基于支持向量机和压力传感器的水果分类系统
2023-10-24王菲菲刘彭孙凤伟周
王菲菲刘 彭孙凤伟周 琼
(1. 濮阳医学高等专科学校,河南 濮阳 457000;2. 山东农业大学,山东 泰安 271018;3. 河南农业大学,河南 郑州 450002;4. 河南大学,河南 郑州 450046)
用于水果分类的分类机械手在食品领域具有重要研究意义和实际应用价值[1]。分类机械手不仅可以提高水果分类的自动化水平、降低劳动成本,还能够提升水果分类准确性、适应多样性水果分类和优化水果供应链管理,为食品产业的发展提供有力支持[2-3]。
目前,分类机械手内嵌水果分类算法和分类系统得到了广泛研究。从算法角度,支持向量机(Support vector machine,SVM)、随机森林、卷积神经网络等机器学习算法被广泛用于水果分类任务;这些算法通过学习大量的训练样本,构建准确的分类模型,实现对水果的自动分类[4-5]。从特征提取和选择角度,研究者们致力于设计高效的水果特征提取和选择方法,以提高水果分类算法的准确性和鲁棒性。从传感器技术角度,水果分类过程中,机械手通过传感器获取水果的相关信息;图像传感器是最常用的传感器之一,机械手可通过图像传感器获取水果的图像信息以进行分类;此外,激光传感器、压力传感器等用于获取水果的形状、硬度等特征的传感器也在水果分类系统设计领域得到了广泛应用。从水果数据集构建角度,研究者们构建了大规模的水果数据集,这些数据集为水果分类算法的研究和评估提供了重要的训练和测试资源[6]。
王志宇[1]以分类机械手的水果分类控制过程为研究对象,基于RGB图像检测方法建立了分类算法。研究结果表明,采用RGB图像检测方法进行的水果分类与人工测量方式获得的水果特征数据具有高度符合性。Zhang等[7]提出了基于触觉感知和机器学习算法的自适应抓手水果识别方法。研究结果表明,采用自适应抓取器和机器学习分类器可以实现高效、准确的水果识别。Elsheikh[8]提出了基于深度学习的水果分类系统,并使用嵌入式比例导数模糊逻辑控制器对分类机械臂进行控制。研究结果表明,所开发的设计有效且准确性高、成本低,能够对水果进行实时识别和分类。Zhang等[9]提出了基于仿生软指的水果无损分类方法,该方法对水果的分类准确率高达95%。
尽管上述研究在用于水果分类算法和分类系统的研究领域取得了一些进展,但在水果高分类准确率、计算成本和传感器成本等方面仍存在不足。电容式压力传感器具有高压力灵敏度、低制造成本等优点。因此,研究拟提出一种基于电容式压力传感器的水果分类系统,该系统通过采用高斯核函数的支持向量机算法对水果进行分类;并将该系统嵌入水果分类机械手,以期为开发更高性能的水果分类机械手提供理论支撑。
1 压力传感器和支持向量机
1.1 电容式压力传感器
触觉传感器由点触压力传感器排列组成,可用以检测和测量给定点的接触力,从而实现特定介质中物体的检查、识别。来自触觉传感器的信息可用于识别一般物体的质量、粗糙度、纹理和形状等[10]。
电容式压力传感器是一种常用的触觉传感器,此类传感器基于其横截面变形或板之间的距离变化引起的电容值变化来反映接触力,每个电容值变化均与明确定义的接触力强度相关联[11]。这类传感器通常具有较长的横截面,可以减少噪声的影响并确保传感器压力检测的准确性。此外,其具有高检测灵敏度和低能耗[12]。
1.2 支持向量机
SVM算法属于有监督的机器学习算法,该算法的目标是将输入数据分类为一组特定的类别,每个类别对应于n维空间中的一个点,其中,n是对象类(特征)的数量[13]。传统SVM算法依赖于输入值的内积,通过将内积替换为在高阶维度上进行计算的核函数,可生成非线性边界和可使用状态空间表示,从而提高SVM算法的物体分类性能[14]。SVM算法对物体分类是通过能够区分不同数据类别的最优超平面完成。在用已知样本进行训练后,可以将SVM算法对数据样本的模式识别推广到未知样本。
给定一个训练集(x,y),其中,x对应于需要分类的模式,例如触觉传感器测量值,y对应于物体类别。SVM算法通过构造一个决策函数f(x),对一个不一定在训练集中的输入模式x进行准确分类[15]。最简单的情况发生在对两类物体的线性分类问题。在该类问题中,SVM算法找到将两类物体数据分开的最优超平面,使两组数据之间的距离最大化[16-19]。
可用于提升SVM算法分类性能的核函数主要包括线性核函数、多项式核函数和高斯核函数等。使用不同的核函数,可以赋予SVM算法不同的物体分类灵活性,并提升区分n维空间中不同物体类别的性能[20-21]。
2 水果电子分类系统
通过电子系统设计基于GKF-SVM和压力传感器的水果分类系统(见图1)。该电子分类系统包括4个主要模块:通过平行板开发的电容式压力传感器、使用模拟器件AD7147开发的电容式数字转换器、通过通用串行总线(universal serial bus,BUS)连接内部集成电路(inter-integrated circuit,I2C)的接口以及负责收集数据并对收集到的信息进行分类的计算机。
平行板电容式压力传感器由两个铜片和乙酸乙烯酯作为介质制成。选择乙酸乙烯酯是因为易于获得,其变形能力好,恢复速度快,介电常数约为2.8。所用乙酸乙烯酯为2 mm厚的板材。平行板传感器设计面积为2 cm2,电容变化百分比>13%。电线被焊接到铜板上,乙酸乙烯酯被粘到铜片上。
AD7147电路是由电荷放大器和Σ-Δ调制器组成的集成电路,用于将测量的电容值转换为数字信号。AD7147执行的测量以16位代码表示(输出值为0~216-1),这与其大约4~30 pF的测量动态范围有关。I2C-USB模块是允许使用Matlab和支持向量机库(LibSVM库)在计算机中实现集成电路总线和分类软件之间的透明接口,使用图形用户界面(Graphical user interface,GUI)显示分类结果。
3 结果与分析
3.1 水果分类系统在机械手上的配置和有效性测试
将所设计的水果分类系统安装于iCub机器人的机械手,通过iCub机器人对水果的抓取试验测试所设计水果分类系统的有效性。
3.1.1 水果分类系统在机械手上的配置 使用电容式压力传感器的iCub机器人的手指可最大限度、逼真地复现人类皮肤的触觉,iCub机器人的指尖用柔性印刷电路板实现,该电路板适用于模仿人类指尖形状的圆形支撑。每个板上都有一层由具有介电性能的硅酮组成的可变形泡沫,然后是连接到接地参考点的传感器,即实现触觉的电容式压力传感器[22]。
每个手指由12个圆形焊盘组成,即12个电容。这些电容器依次连接到电容数字转换器的输入通道,允许通过串行接口将收集到的信息传输到微处理器系统[23]。其实现使得iCub机器人可以施加必要和足够的电压来拾取和夹住不同的物体。测试[24]分析表明,使用电容式压力传感器的iCub机器人可对物体进行准确分类。
为测试所设计的水果分类电子系统的有效性,将所设计电子系统并入iCub机器人手指,即将GKF-SVM算法用于处理iCub机器人手指捡取水果时手指表面电容式压力传感器采集的电容数据,iCub机器人的机械手如图2所示。

图2 iCub机器人的机械手
3.1.2 水果分类系统对12种水果的分类测试
(1) 通过安装在固定位置和方向的iCub机器人抓取水果并通过机器人手指上的压力传感器提取对12种不同水果的电容分布数据,机器人的手指保持在预定位置,并张开到足以容纳物体。所测试的12种水果为:杏、蛇果、橙子、李子、油桃、桔子、西红柿、柿子、沃柑、苹果、大青枣、葡萄。
(2) 使用采用不同核函数的SVM算法(线性SVM、三次SVM、二次SVM和高斯SVM)对iCub机器人5个手指(拇指、食指、中指、无名指和小指)、4个手指(拇指、食指、中指、无名指)、3个手指(拇指、食指和中指)和2个手指(拇指和食指)上的电容式压力传感器获得的数据进行处理,以确定水果类别。
对每种水果进行50次分类测试,每次测试12个同品种水果,对所有水果分类的平均准确率见表1。

表1 采用不同核函数的支持向量机算法对水果的分类结果
由表1可知,采用高斯核函数的SVM对来自压力传感器的数据进行处理后呈最佳水果分类结果,即对考虑2个或更多电容式压力传感器的所有情况下呈最低的水果分类误差。
当使用3个手指、4个手指和5个手指上的电容式压力传感器采集到的数据时,对水果分类的准确率均>96%。即如果放弃使用来自无名指和小指传感器的数据,所构建系统对水果分类的性能不会有显著损失。此外,所使用的传感器数量越少,计算成本越低。
当选择2个电容式压力传感器(2个手指)采集到的数据作为输入且采用确定的SVM算法时,所构建水果分类系统的水果分类准确率最低,且采用线性SVM算法时,对水果的分类准确率最低,但仍达到96.6%;采用高斯SVM算法时,对水果的分类准确率达到98.6%。该对比结果表明,所构建的水果分类系统可在水果高分类准确率、低计算成本和低传感器成本之间取折中。
此外,iCub机器人在使用2个手指时,除了拇指+食指,还有其他组合,但在实际应用中优先使用拇指+食指,因为通过拇指+食指可实现对水果的捏合运动,即拇指+食指更容易拾取水果。
3.2 水果分类系统在智能手套上的配置和有效性测试
3.2.1 水果分类系统在智能手套上的配置 为进一步测试所设计水果分类电子系统的有效性,将所设计电子系统安装在聚酰胺和弹性纤维构成的手套上,水果分类智能手套的组装如图3所示。压力传感器和电容式数字转换器粘在轻薄的手套上,选择这种手套是因为其手指和手腕处非常灵活,可实现对水果最大的形态适应性。

图3 采用电容式压力传感器的电子智能手套示意图
传感器静止状态下的AD7147读数约为15 000(十进制),约为6.8 pF的电容值,该值与使用RLC仪表进行测量时获得的值相等。该值对应于凸出的平行板之间的等效电容(2.48 pF)以及触点、电缆和引脚的寄生电容。当按下压力传感器时,可以观察到电容值显著增加,在所有测试情况下读取的电容值不超过AD7147的动态读数范围。出于简化水果分类的目的,可直接使用从电容式数字转换器数字输出获得的十进制值。
3.2.2 水果分类系统对不同水果的分类测试 对不同水果进行了分类测试,每种水果重复测试50次,每次测试10个同品种水果。这些水果包括杏(F1)、蛇果(F2)、橙子(F3)、李子(F4)、油桃(F5)、西红柿(F6)、柿子(F7)、桔子(F8)、苹果(F9)、大青枣(F10)、葡萄(F11)。采用不同核函数的SVM算法处理电子手套拇指和食指压力传感器采集的电容数据,将这些数据以散点图形式呈现,如图4所示。横坐标对应拇指传感器测量值,纵坐标对应食指传感器测量值。

图4 采用高斯核函数的SVM算法对不同水果分类测试的散射矩阵
由图4可知,电子手套拇指和食指压力传感器采集的电容数据以分区的集群形式呈现。一些水果对应的电容数据之间存在重叠(如橙子和桔子之间、西红柿与柿子之间),使得在这些重叠区域很难区分水果类别。例如,对于橙子和桔子,观察到的重叠是由于这两种水果在形状和质量上非常相似。
物体的质量越大,电容式压力传感器的读数越大。对于不同质量的相同物体,如小桔子和大桔子,质量越大,使用电容式压力传感器得到的值越大。还可观察到,有些类的点比其他类更集中,例如苹果、蛇果、大青枣。这是因为该类水果的硬度较大,可对所施加的力提供一定的阻力并且不会出现明显的变形,因此,用于固定其压力变化不大。对于柔软的水果,如杏、桔子、葡萄,测量结果更分散,反映了其更柔软和可变形的纹理。而且这种类型的水果允许在其操作中应用可变压力。
拇指压力传感器测量值之间的分散程度(范围为3.4×104~5.2×104)比食指压力传感器测量值之间的(范围为5.4×104~5.9×104)更大。这种更大的动态范围是由于两个传感器的接触面积的差异造成的。与食指传感器相比,拇指传感器与水果表面的接触面积往往更大,因此对压力变化更敏感。
以电子手套拇指和食指压力传感器采集的电容数据为基础,采用不同核函数的SVM算法对所有水果分类的平均准确率见表2。由表2可知,所有SVM算法对水果的分类准确率均在96%以上,且采用高斯核函数的SVM算法仍获得最高的分类准确率。

表2 基于电子手套双指电容数据和不同SVM算法的水果分类结果
此外,通过混沌矩阵对采用高斯核函数的SVM的水果分类性能进行评估,某一次测试的分类结果的混淆矩阵如图5所示,TA和FN分别为分类准确率和假阴性率。由图5可知,不正确的分类首先出现在橙子与桔子、西红柿与柿子的数据簇中,即具有大致相同质量和形状的水果。
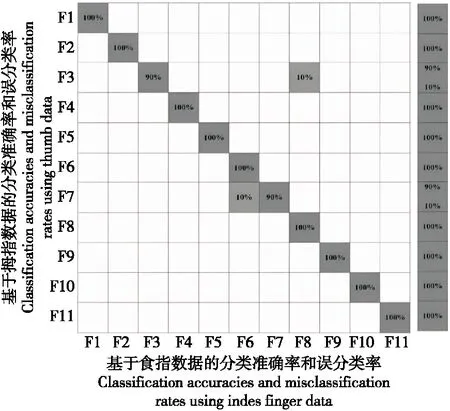
图5 基于高斯核-SVM算法的水果分类结果混淆矩阵示例
以上结果表明,所开发的水果分类系统可根据实际计算成本要求和传感器成本要求,选择合适的电容式压力传感器配置,且在所有的传感器配置方案下,采用高斯核函数的SVM算法均能实现高水果分类准确率,达到98.6%(12种水果)或98.8%(11种水果);智能手套测试中删除了易与橙子和桔子混淆的沃柑,故水果分类准确率略有升高;由于每种水果每次测试10个果实、重复50次测试,故得到的水果分类准确率末尾均为偶数。
4 结论
研究提出了一种基于电容式压力传感器的水果分类系统,该系统通过采用高斯核函数的支持向量机算法(高斯支持向量机算法)对水果进行分类。结果表明,水果分类智能手套在使用两指的情况下,尽管与其他条件获得的结果相比准确率较低,但分类准确率仍达到98.6%;在所有的传感器配置方案下,与采用线性核函数、二次核函数和三次核函数的SVM算法相比,采用高斯核函数的SVM算法均能实现最高水果分类准确率,达到98.6%(12种水果)或98.8%(11种水果)。此外,所开发的水果分类系统可根据实际计算成本要求和传感器成本要求,选择合适的电容式压力传感器配置,即可根据实际需要在分类准确率、计算成本和低传感器成本之间权衡。所开展研究未分析分类准确率、计算成本和低传感器成本之间的逻辑关系;后续将深入讨论分类准确率、计算成本和低传感器成本之间的逻辑关系。
