基于磁致伸缩超声导波的道岔尖轨缺陷监测实验研究
2023-08-06栗霞飞刘秀成李佳明林书毅马一凡
栗霞飞, 吴 斌, 刘 尧, 刘秀成, 李佳明, 林书毅, 马一凡
(1.北京工业大学材料与制造学部, 北京 100124; 2.北京格创精仪科技有限公司, 北京 102629;3.北京全路通信信号研究设计院集团有限公司, 北京 100073)
钢轨是铁路轨道的主要组成部件,直接承受轮对传来的压力,长期使用过程中出现的缺陷伤损影响其服役性能且威胁行车安全。道岔是铁路线路中实现轨道转换的重要设备,也是轨道的薄弱环节之一。转辙器是道岔的重要组成部分,主要包括机泵、尖轨和转辙机构[1]。在实际服役过程中,尖轨因承受复杂的载荷状态和大变形循环而容易萌生局部裂纹,一旦裂纹扩展极易引发断轨失效等安全事故[2]。因此,在道岔智能运维过程中,急需发展适用于工况的道岔尖轨缺陷监测技术。
目前可用于基本轨和尖轨缺陷监测的方法中,牵引回流和准轨道电路法应用较成熟,但其监测能力易受道床条件影响[3-4]。光纤应变监测法对断轨行为具有很高的灵敏度,但复杂随机载荷引起的尖轨变形导致监测信号判读较为困难[5]。要实现整个尖轨区段(10~20 m)的完整监测,光纤应变传感器的铺设和维护成本较高。超声导波是一种可在基本轨、尖轨等结构中长距离传播的具有多模态和频散特性的超声波[6]。相比光纤应变监测法而言,只需在尖轨特定位置布置单一导波监测传感器,基于自激自收模式,就可以实现长距离内尖轨缺陷的有效监测[7-8]。
目前,针对等截面钢轨中超声导波传播特性的研究较多。例如,Hayashi等[9-10]采用半解析有限元方法计算了等截面钢轨的频散曲线,通过研究轨底的波结构分布,给出了适合轨底缺陷监测的导波模态。Cerniglia等[11]和陈晓阳[12]实验研究了瑞利波在等截面钢轨轨底的传播特性,应用类瑞利波成功监测出轨底缺陷。卢超等[13]实验研究了轨底不同深度、不同角度斜裂纹缺陷对120 kHz的类瑞利波反射回波幅值的影响,观察到缺陷回波幅值与缺陷深度呈正相关。
尖轨是复杂变截面构件,其中的超声导波传播特性非常复杂,当前针对等截面钢轨的研究结论难以直接应用于尖轨。胡剑虹等[14]采用ABAQUS/Explicit有限元方法分析了道岔尖轨中的导波传播过程,认为在轨底激发64 kHz的类水平剪切模态导波具有尖轨轨底缺陷的监测能力,并利用压电传感器在实际道岔中激发导波,验证了有限元分析结果的准确性。Wu等[15]利用压电传感器分别安装在尖轨轨腰和轨底2个位置激发导波,对轨底、轨腰处槽型缺陷进行监测。由于缺陷信号被结构散射信号淹没而难以直接识别,他们提出利用独立分量分析方法对缺陷进行定位。
实际工况中,尖轨通过紧固螺栓、扣件等方式与转辙机构、基本轨等进行机械连接,导波在连接处的多重散射特性加剧了传感器监测信号的复杂性,仅利用单次导波信号难以对尖轨中的缺陷信息进行评价。基于参考信号的导波监测方法可以有效改善这一问题。例如付连著等[16]和杨臻垚[17]分别利用压电换能器和磁致伸缩传感器在尖轨中激发不同模态的超声导波,初步实现了模拟缺陷的实验监测,但并未细致探究实际环境中尖轨温度、导波频率对缺陷监测能力的影响。
本研究利用平板式磁致伸缩传感器,在14.28 m道岔尖轨轨底激励产生纯净的类水平剪切模态导波,对轨头和轨底的槽型缺陷进行了长时间监测,重点分析了环境温度、缺陷尺寸等因素对不同频率反射回波能量的影响,提出了温度补偿方法,实现了尖轨缺陷的有效监测。
1 传感器与实验系统
1.1 磁致伸缩导波实验系统
采用自主开发的MsTGW.Ⅱ型磁致伸缩导波系统开展监测实验,系统主要包括计算机、平板式磁致伸缩传感器和超声导波监测仪器,如图1(a)所示。
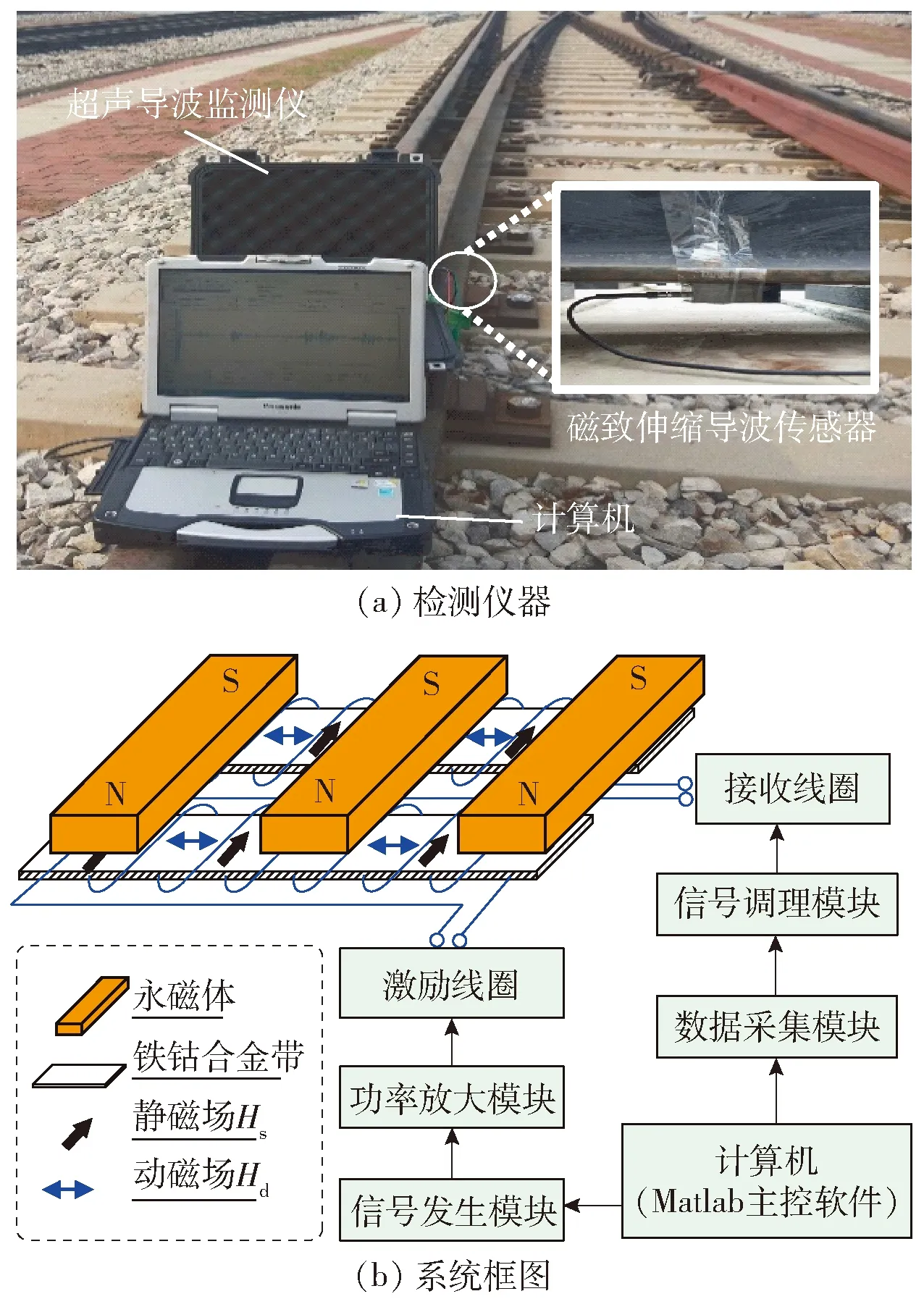
图1 导波监测仪器照片及系统框图Fig.1 Guided wave testing instrument photo and system block diagram
平板式磁致伸缩传感器安装于尖轨轨底,基于逆魏德曼效应设计,结构示意如图1(b)所示。采用线性排布的多个薄永磁体提供静态磁场对其下方放置的2个铁钴合金条带(长120.0 mm、宽25.4 mm)进行偏置磁化。沿铁钴合金条带长度方向绕制矩形截面螺线管(线径0.2 mm、线距1.7 mm)。传感器部件整体封装于环氧树脂内部以固化成形,螺线管的端口与传感器侧面的雷莫接口相连接。
监测实验过程中,信号激励模块输出5周期汉宁窗调制的正弦信号,经功率放大电路放大后通入图1(b)所示的激励线圈,以提供沿铁钴合金条带长度方向的动态磁场。在相互正交的偏置磁场和动态磁场作用下,由逆魏德曼效应可知,铁钴合金条带内部将形成平面剪切应力波,经环氧树脂耦合至轨底后,扩散至尖轨横截面并沿尖轨长度方向传播,形成超声导波。本研究使用的导波传感器布置在道岔尖轨轨底,可使传感器激励的导波沿道岔尖轨纵向传播。因此,其导波传播方向与位移垂直,类似于板结构中的水平剪切模态导波[5,18]。
超声导波遇到尖轨中的特征结构(如转辙机构、缺陷等)将产生复杂的反射回波,传播至传感器安装位置时,扰动铁钴合金条带内的磁场并被接收线圈感应形成电压信号(即反射回波信号),经过带通滤波(20~90 kHz)和放大(50 dB)模块转换电路后被采集卡所采集。
1.2 尖轨试件
测试对象为12号道岔尖轨,全长约14.28 m。选择对靠近尖轨尖端的一侧进行缺陷监测,传感器安装和缺陷加工位置如图2所示。尖轨除了转辙机构,还有拉杆、滑床板、限位器等部件。在本次测试中尖轨与基本轨处于斥离状态,所以将这些情况对信号的干扰设置为一个定值,也就是基准信号。后续的研究都是基于基准信号进行分析,这样可以很大程度增强缺陷信号的识别能力。
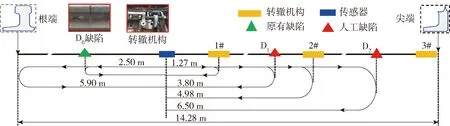
图2 道岔尖轨结构及传感器安装位置示意Fig.2 Schematic diagram of the structure of the switch tip rail and the installation position of the sensor
在开展监测实验前,距离传感器左侧约2.50 m处的轨头存在一处前期实验中加工的缺陷,标记为D0。D0缺陷贯穿轨头一直延伸至轨腰上半部分,缺陷深度为66.67 mm。在距离传感器右侧约4.98 m的轨头位置和6.50 m处的轨底位置,利用角磨机分别加工槽型缺陷,典型的缺陷照片如图3所示。
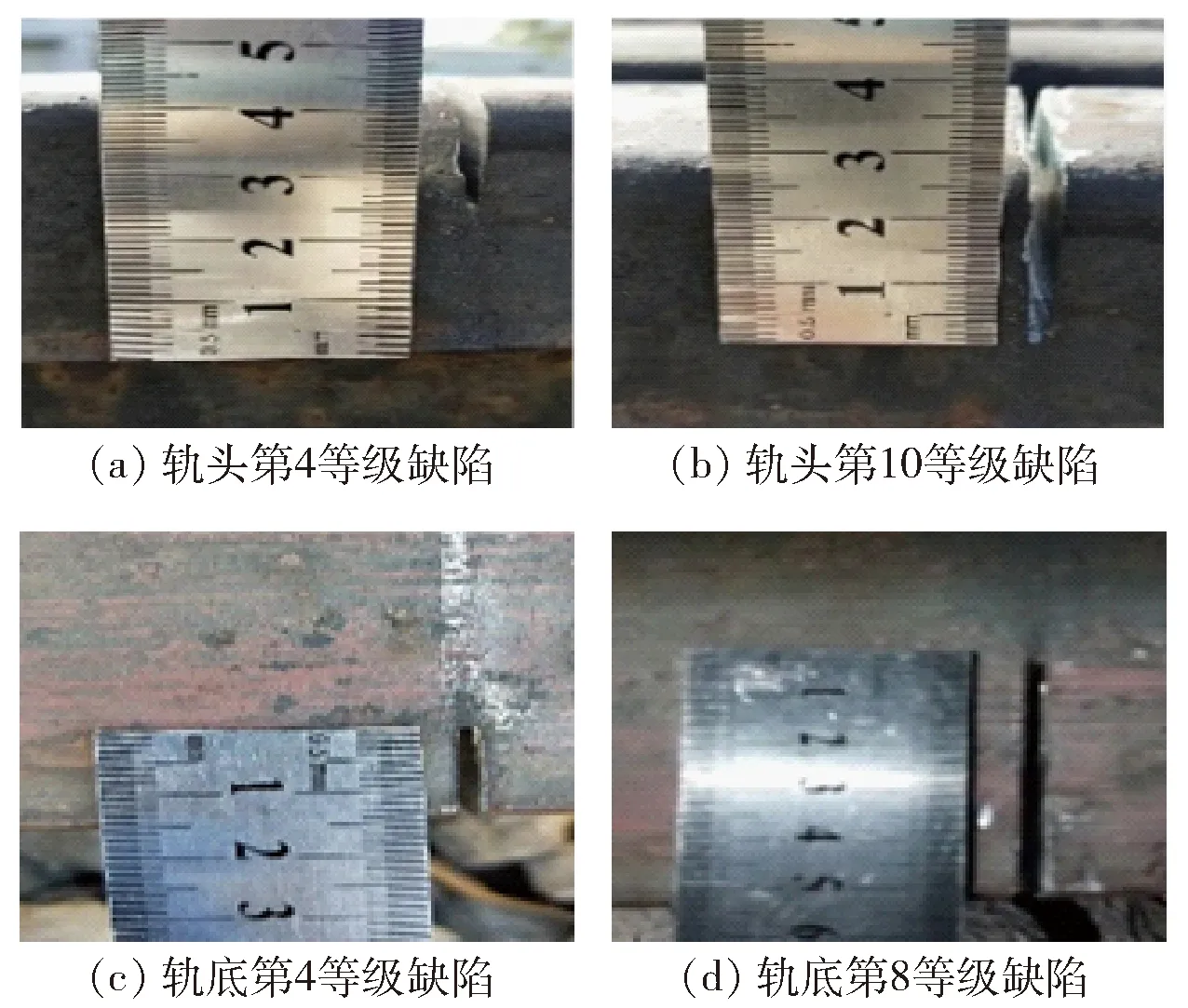
图3 人工缺陷实物照片Fig.3 Physical photos of artificial defects
轨头缺陷D1和轨底缺陷D2分多次进行加工,以模拟缺陷的不断扩大过程。表1给出了不同等级缺陷的测量估计尺寸。
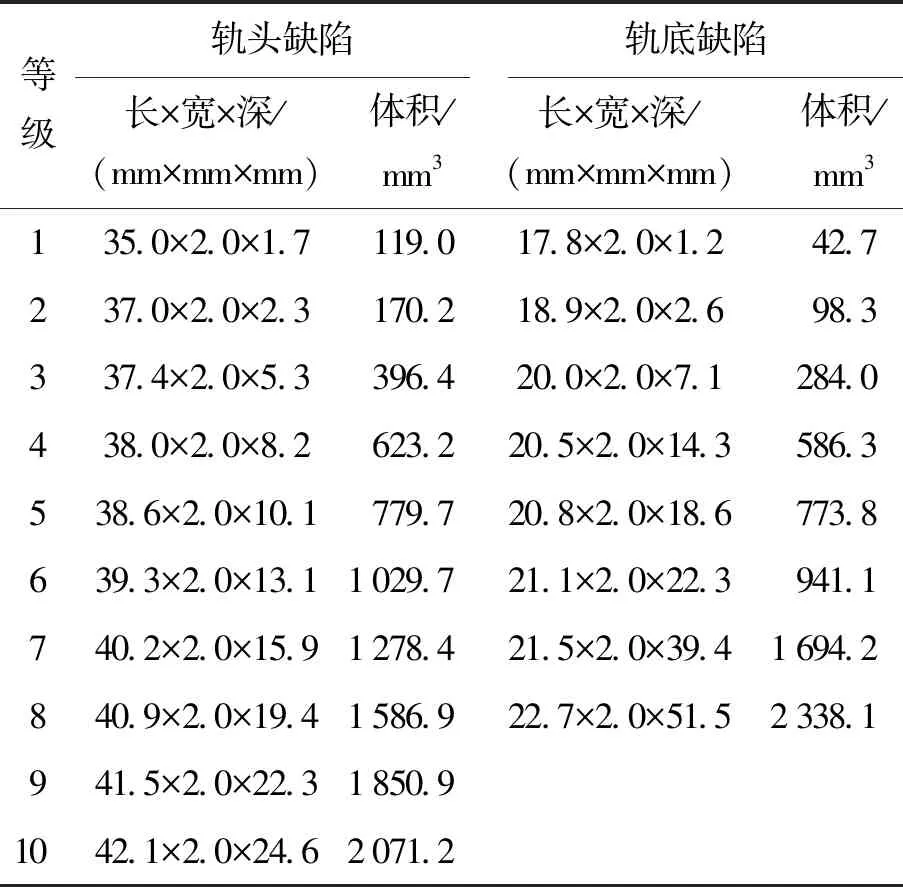
表1 道岔尖轨缺陷特征参数
1.3 监测方案
传感器工作于一激一收模式,先后设置导波激发的中心频率为30、70和100 kHz,3个频率分别代表低频导波、中频导波和高频导波,分3个阶段开展监测实验,实验时间为2020-10-22中午到2020-10-23晚上。
1) 第1阶段,采集不同环境温度条件下的导波反射回波信号,用于分析温度对信号特征的影响规律,实验测试温度为14.4~23.6 ℃,共进行48组实验,每组实验重复采集3次,共计144组实验数据.
2) 第2阶段,在图2人工缺陷标记位置加工轨头缺陷D1,记录导波对所有等级缺陷的监测信号,3个激励频率下,各设置了10个缺陷等级,每个等级采集3组数据,每组数据重复采集3次,共计90组轨头缺陷数据.
3) 第3阶段,在轨底逐级加工缺陷D2,3个激励频率下,各设置了8个缺陷等级,每个等级采集3组数据,每组数据重复采集3次,共计72组轨底缺陷数据.
图4所示为监测开始时第1阶段(未加工缺陷D1和D2)传感器采集的典型实验信号波形。结合图2所示的尖轨特征结构分布位置,可以对图4所示的信号波形进行识别。转辙机构末端部件穿过轨腰的螺栓孔并通过螺栓与轨腰紧固。螺栓孔及界面接触力的存在均会改变导波的传播特性,形成复杂的反射回波。从3个频率的监测信号中均可以辨别出3处转辙机构的特征反射回波。30 kHz相比于70、100 kHz的转辙机构反射回波较明显。
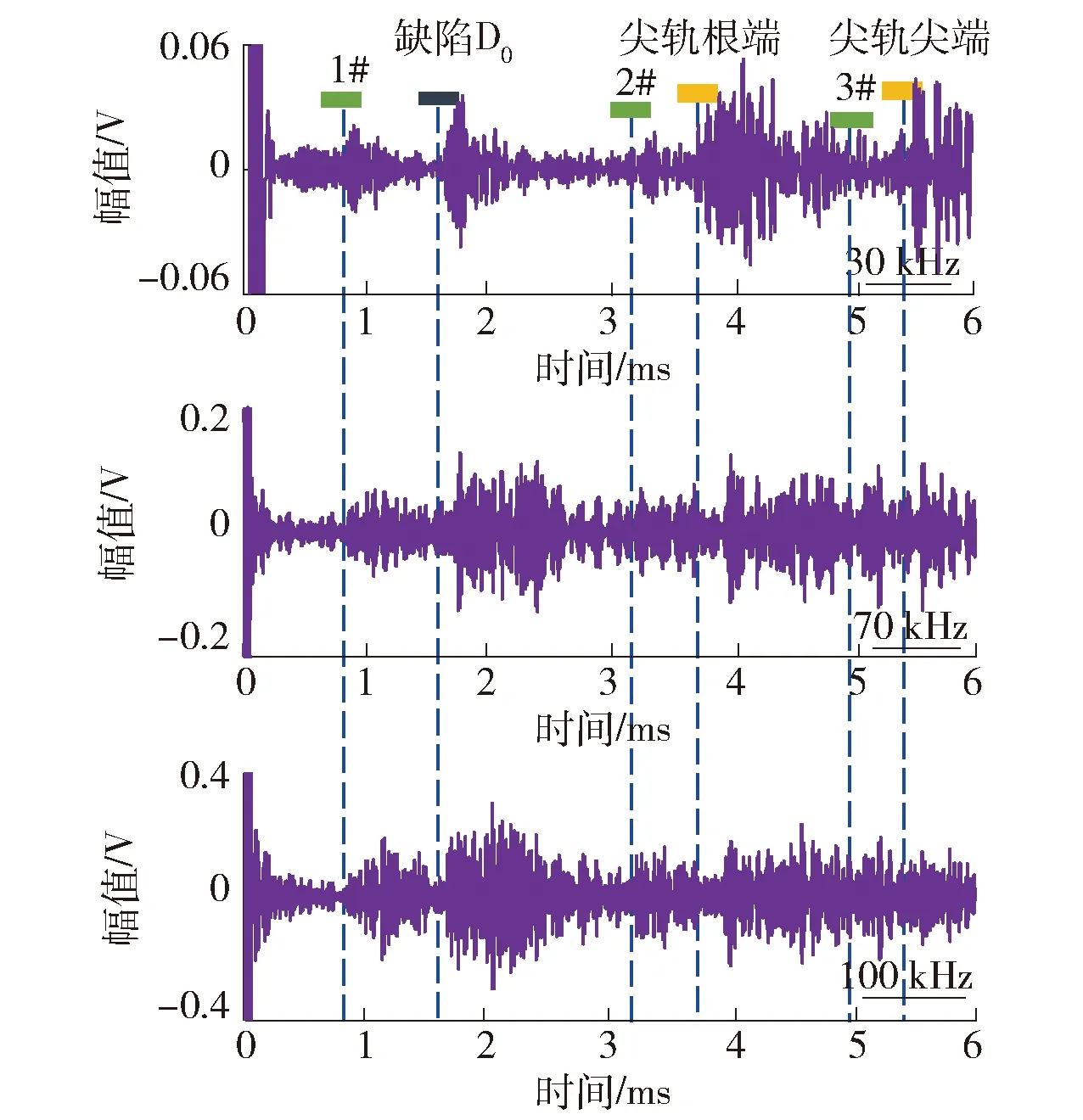
图4 不同频率的导波监测信号波形Fig.4 Waveforms of guided wave detection signals at different frequencies
尖轨除了有转辙机构,还有拉杆、滑床板、限位器等部件。不同频率的监测信号均具有较高的本底噪声,这与导波在变截面尖轨中的复杂反射及在特征结构处的复杂散射有关。对比图4中的3组波形可以看出,特征结构的反射回波信号幅值随导波激励频率不同而存在差别。例如对比转辙机构反射回波,中心频率为30 kHz的导波在尖轨根端和尖端的反射信号幅值反而更高;但在100 kHz时,这一规律正好相反。
从图4中可以有效识别出原有缺陷D0的反射回波,这表明从轨底激励超声导波,可以监测出尖轨的缺陷,但缺陷反射回波特征随导波激发频率而不同。这是因为低频导波能量更多地集中于轨底传播,而高频导波在尖轨中传播时能量主要集中在轨腰和轨头。相比30 kHz而言,中、高频(70、100 kHz)更适合用于轨头缺陷监测。D0缺陷的深度已达到了尖轨截面积的50%左右,这时候的缺陷深度已达到了断轨的程度。30 kHz主要能量在轨底传播,但还是有一部分能量可以在轨头传播。因为D0缺陷距离传感器较近,所以轨头的反射回波容易被捕捉到。
虽然可从图4所示波形中初步识别出尖轨特征反射回波,但结构特征回波存在多次回波叠加及拖尾现象,加上较高的信号底噪,直接从单次导波监测信号中识别小缺陷反射信号非常困难。
2 环境温度对监测信号影响
环境温度的变化不仅会改变超声导波在尖轨中的传播速度,还会影响磁致伸缩传感器与尖轨轨底的耦合状态,使得导波监测信号特征出现波动。以1#转辙机构的特征回波信号为例,图5给出了不同温度时在时间窗口0.7~1.0 ms内观察到的信号波形。可以明显看出,不同频率导波反射信号波形的相位(与传播速度相关)和幅值均随温度而变化。
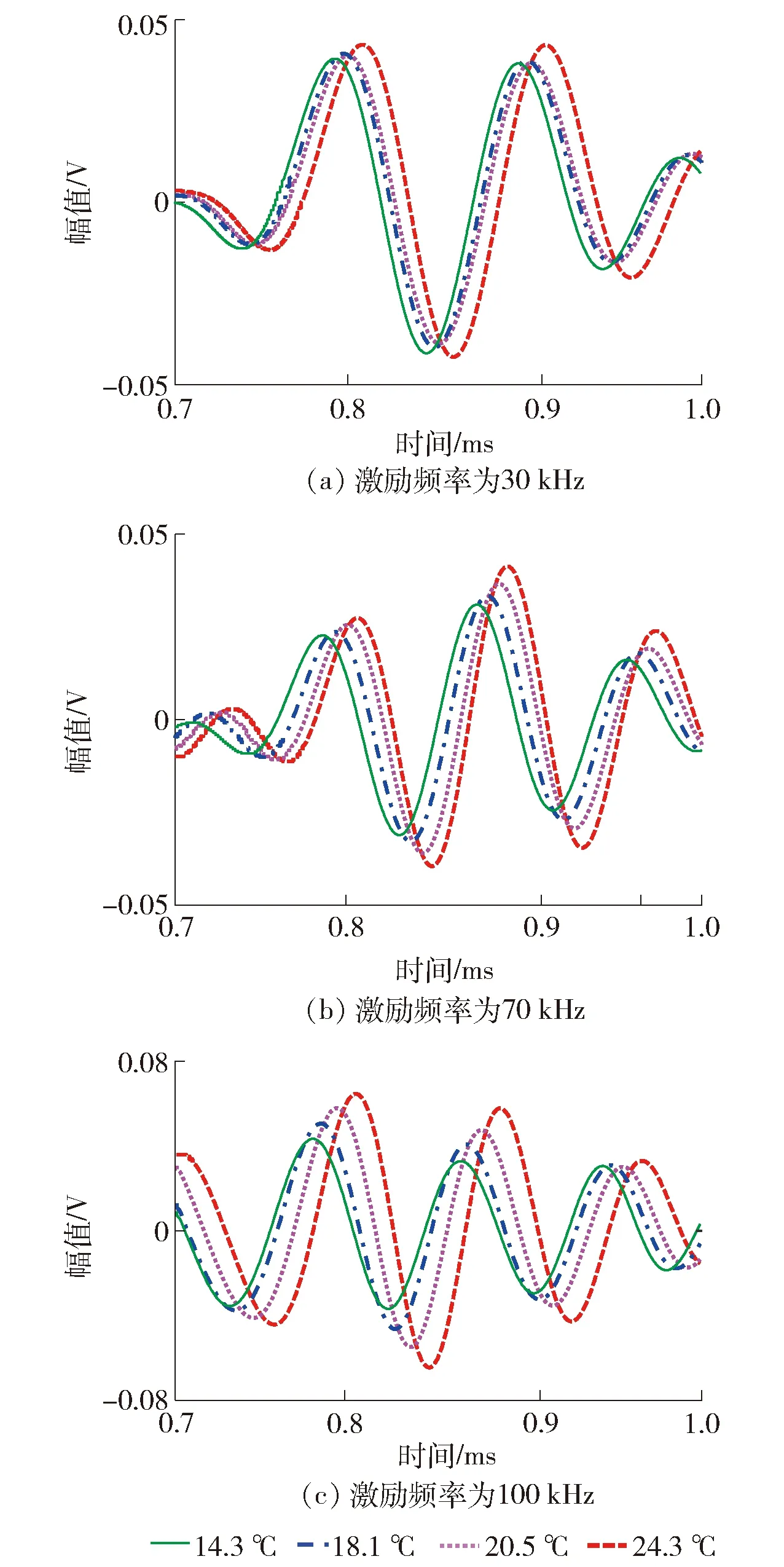
图5 不同温度时采集的转辙机构反射信号Fig.5 Reflected signals of switch mechanism collected at different temperatures
这里主要研究温度对导波反射波包能量的影响,波包能量E的统计方法为
式中:A(t)为t时刻波形幅值;t1和t2分别为观察时间窗口的起点和终点。
利用加工缺陷D1之前采集的144组实验信号,统计实测环境温度以及1#转辙机构特征波包能量(时间窗口0.8~1.6 ms),图6所示为转辙机构反射波包能量值和环境温度随采集次数的变化曲线。在同样的外界条件影响下,不同激励频率下传感器采集的转辙机构波包信号能量值的变化趋势各不相同。当采集次数为0~90次时,环境温度降低,此时转辙机构反射信号能量值也随之降低;当采集次数为90~144次时,环境温度升高,转辙机构反射信号能量值也逐渐增大,环境温度和信号能量值呈同向变化的趋势。

图6 转辙机构反射波包能量值与环境温度的变化规律Fig.6 Change law of reflected wave packet energy value of switch mechanism and ambient temperature
为了更准确地了解特征结构反射信号能量值与温度的关系,在同一次采集的数据中,分别提取转辙机构反射信号的能量值和实验所处的室外温度,得到转辙机构反射波包能量值与温度的关系。不同频率统计的特征波包能量变化趋势与环境温度波动规律基本相符,两者的线性相关分析结果如图7所示。

图7 转辙机构反射波包能量值与温度的关系Fig.7 Relationship between reflected wave packet energy value and temperature of switch mechanism
不同频率条件下线性回归方程的确定系数R2高于0.86,表明在测试的温度范围内,导波在尖轨转辙机构的特征反射信号能量随温度近似呈线性增长趋势。因此,利用导波特征反射信号进行尖轨缺陷识别时,温度的变化也会直接影响反射信号的监测,所以应对温度的影响进行补偿。
以激励频率为30 kHz的实验信号为例,利用特征信号和基准信号的能量比值进行温度补偿。尖轨中的原有缺陷D0的反射信号其能量值随环境温度的变化趋势如图8中的虚线所示。
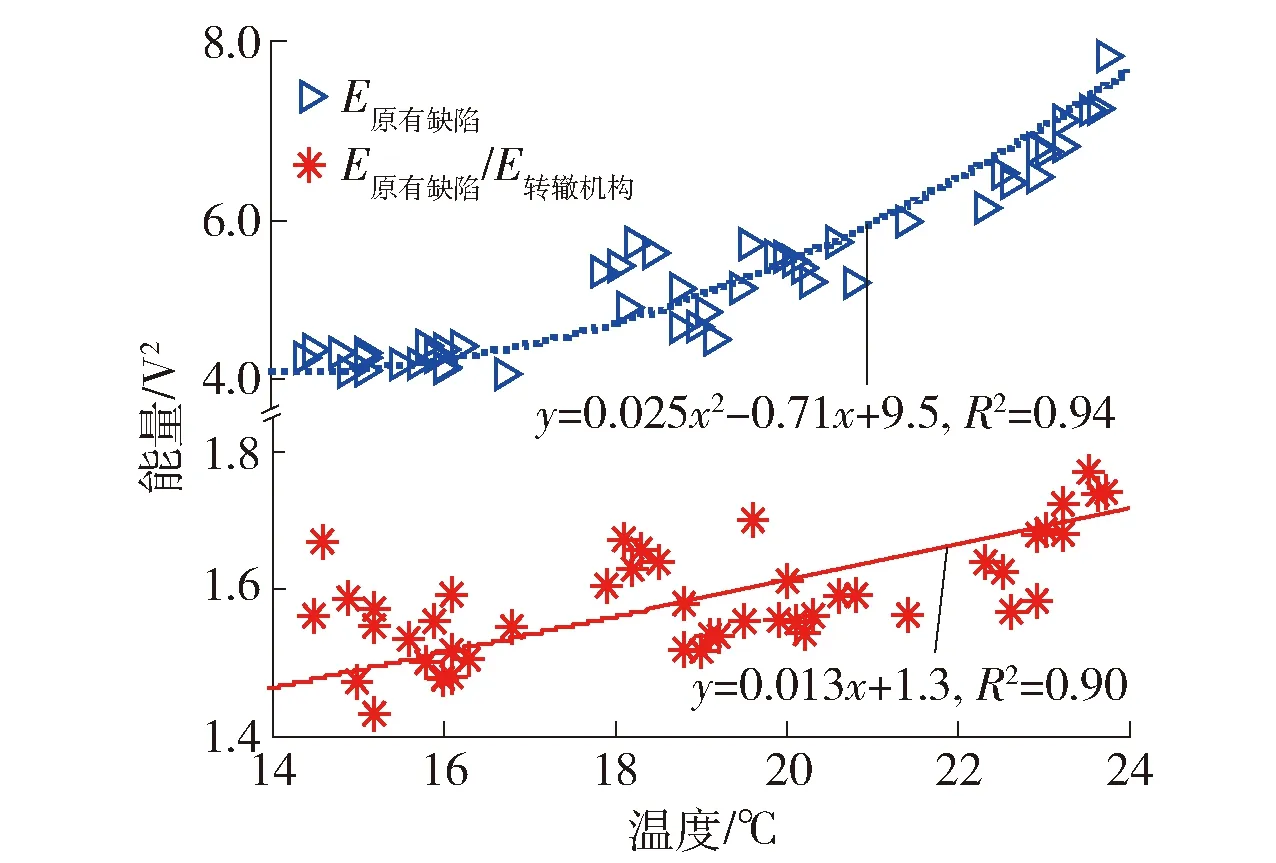
图8 温度补偿前后结果对比Fig.8 Comparison of results before and after temperature compensation
当温度从14.4 ℃上升至23.6 ℃时,信号能量值增加了约62.3%。假定缺陷和转辙机构反射回波受温度影响的权重相当,计算它们的能量比值可抑制温度的影响。计算得到的能量比值在测试温度范围内仅上升了约8.2%,表明温度对信号的影响得到了有效抑制。后续监测实验中,将使用上述方法对缺陷信号进行温度补偿。
3 尖轨缺陷的导波监测结果
3.1 原始监测信号
当在轨头区域加工槽型缺陷D1后,监测得到的信号如图9所示。选取了尖轨未加工缺陷(红实线)时的导波信号和第10等级的导波信号(蓝虚线)进行对比。随着缺陷等级的递增,轨头缺陷的反射信号(2.5~2.8 ms)幅值也在逐渐变大,缺陷后端的信号(2.8~3.0 ms)能量值在减小。
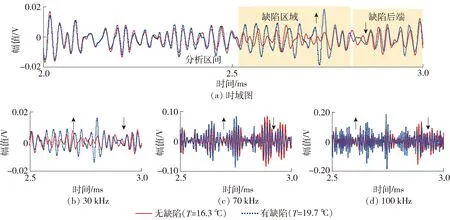
图9 轨头缺陷导波监测结果Fig.9 Guided wave monitoring results of rail head defect
当轨头缺陷D1加工完成后,进一步在轨底进行缺陷D2的加工。图10给出了第8等级D2缺陷的导波监测结果(蓝虚线)。通过对比分析,仍然可以观察到前述的“先扬后抑”现象。从图9、10的结果可以初步判定,不同频率的导波均可以实现轨头和轨底缺陷的有效监测。

图10 轨底缺陷导波监测结果Fig.10 Guided wave monitoring results of rail bottom defect
3.2 定量评价
为定量评价导波对缺陷的监测能力,将图9、10中标记的缺陷信号(4.2~4.9 ms)和缺陷后端特征反射信号(5.5~5.8 ms)的能量值进行统计,分别记为Ed与Eh。
将统计的缺陷信号能量值Ed与1#转辙机构Ez的反射信号(0.8~1.6 ms)能量进行比值计算以补偿温度的影响,得到缺陷信号波包特征值ε=Ed/Ez。利用“先扬后抑”特性,将Ed与Eh的比值记为β=Ed/Eh,这一参数自动对温度进行了补偿。
以30 kHz的导波监测结果为例,2个特征参量β和ε随缺陷体积的变化趋势如图11所示。随着缺陷体积的增大,特征参量β和ε逐渐增大。统计图11所示2条曲线的右端点相对无缺陷时的特征参数取值的相对变化,β和ε的相对变化值分别为38.1和4.2。因此,相比特征参量ε,统计了“先扬后抑”特性的参量β对缺陷体积变化的监测能力更优。

图11 特征参量β和ε随缺陷体积的变化趋势Fig.11 Variation trend of characteristic parameters β and ε with defect volume
图12给出了缺陷D1和D2体积增大过程中不同频率导波特征参数β的监测结果。
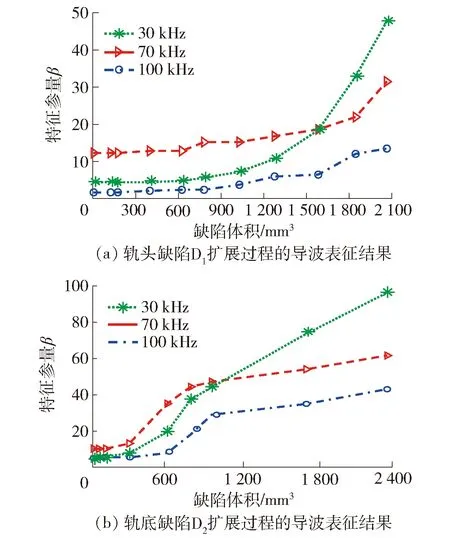
图12 道岔尖轨缺陷扩展过程中的导波表征结果Fig.12 Characterization results of guided waves during the propagation of the point rail defect of the switch
为定量评价导波对缺陷体积的监测能力,以β取值超出无缺陷时的10%为缺陷识别阈值,统计得到如下结果:
1) 对于轨头缺陷,30、70和100 kHz导波可识别的最小缺陷体积分别为:779.7、779.7和1 029.7 mm3,对应的尺寸(长×宽×深)分别为:38.6 mm×2.0 mm×10.1 mm、38.6 mm×2.0 mm×10.1 mm、39.3 mm×2.0 mm×13.1 mm。
2) 对于轨底缺陷,30 kHz的缺陷监测能力最好,可识别的缺陷尺寸(长×宽×深)为20.0 mm×2.0 mm×7.1 mm,对应缺陷体积为284.0 mm3。
4 结论
1) 利用板式磁致伸缩传感器在轨底激励30~100 kHz范围的类水平剪切波,可以有效监测到转辙机构、轨头和轨底缺陷,但导波在尖轨中散射特性复杂,形成高幅值的固有噪声,易掩盖缺陷反射回波,增加了缺陷识别难度。
2) 环境温度变化会改变超声导波的传播速度及结构特征反射回波波形及其幅值。结构特征反射波包能量值随温度升高呈近似线性增长趋势。利用特征信号和基准信号的能量比值,可以有效补偿温度对监测结果的影响。
3) 利用监测信号中缺陷及其缺陷后端回波波包能量的“先扬后抑”现象,统计特征参量β可增强导波对缺陷的识别能力。
