智慧矿山挡墙状态检测方法
2023-04-29许联航李曦郭叙森李静
许联航 李曦 郭叙森 李静

摘要:無人驾驶车辆在矿山行驶过程中,如果矿区挡墙出现破损而没有被及时发现并修复,车辆在行驶或卸载时超出挡墙安全范围,易造成安全事故。现有的挡墙状态检测方法多是基于车端、无人机传感设备采集的点云数据,视野有限,稀疏性较大,稳定性差,且缺乏针对挡墙状态完整性检测的方法。针对上述问题,提出了一种基于路侧激光雷达传感器的挡墙状态完整性检测方法。采用分辨率较高的路侧激光雷达传感器采集车辆行驶区域的挡墙点云数据,采用多边形区域滤波及体素栅格化获得完整的挡墙点云数据。采用滑动寻迹搜索技术,沿着挡墙延伸方向将其划分成子单元,以适应不同形状挡墙。针对矿区场地不平整及远处点云数据稀疏带来的误检问题,采用高度差阈值和密度阈值双阈值法,通过检测子单元的缺陷情况得到整个挡墙状态的完整性检测。采集了内蒙古某矿区“L”型、“S”型挡墙的点云数据,并在有遮挡和无遮挡的场景下进行现场试验,结果表明,该检测方法对不同形状挡墙的缺陷均具有较强的检测能力,能够实时识别并标记出点云数据的破损部位。
关键词:智慧矿山;无人驾驶矿车;道路挡墙;点云;体素栅格化;路侧激光雷达传感器中图分类号: TD634 文献标志码: A
Method for detecting the status of retaining walls in intelligent mines
XU Lianhang1, LI Xi2, GUO Xusen2, LI Jing2
(1. CHN Energy Shendong Coal Group Co., Ltd., Ordos 017209, China;
2. Aerospace Heavy Industry Co., Ltd., Xiaogan 432000, China)
Abstract: During the driving process of unmanned vehicles in mines, if the retaining wall in the mining area is damaged and not detected and repaired in a timely manner, the vehicle may exceed the safety range of the retaining wall during driving or unloading. It can easily cause safety accidents. The existing methods for detecting the status of retaining walls are mostly based on point cloud data collected by vehicle and drone sensing devices. The methods have limited field of view, high sparsity and poor stability. There is a lack of detection methods for the integrity status of retaining walls. In order to solve the above problems, a method for detecting the integrity of retaining wall status based on roadside LiDAR sensors is proposed. A high-resolution roadside LiDAR sensor is used to collect point cloud data of the retaining wall in the driving area of the vehicle. Polygonal area filtering and voxel rasterization are used to obtain complete point cloud data of the retaining wall. A sliding trace search technique is used to divide the retaining wall into sub units along its extension direction to accommodate the different shaped retaining walls. In response to the problem of false detection caused by uneven mining sites and sparse remote point cloud data, a dual threshold method of height difference threshold and density threshold is adopted. It detects the integrity of the entire retaining wall status by detecting the defects of subunits. The methodcollects point cloud data of "L" and "S" type retaining walls in a mining area in Inner Mongolia. The on-site experiments are conducted in both occluded and unobstructed scenarios. The results show that this detection method has strong detection capability for defects in different shapes of retaining walls. The method can identify and mark the damaged parts of point cloud data in real-time.
Key words: intelligent mine; unmanned mining vehicle; road retaining walls; point cloud; voxel rasterization; roadside LiDAR sensor
0 引言
矿山作业中,矿车安全行驶的屏障是道路挡墙。挡墙分布于排土场和主干道左、中、右行驶区域的边界,在智慧矿山无人车辆行驶过程中,如果矿区挡墙出现破损而没有被及时发现并修复,车辆在行驶或卸载时超出挡墙安全范围,容易造成安全事故,因此需要实时监测挡墙的变化,将破损区域信息及时发布至管控中心,协调推土机等工程机械对挡墙进行修复[1-3]。
矿山道路复杂、挡墙形状分布不一且时刻在变化,难以采用统一模型进行准确的特征提取以实现挡墙状态实时检测。目前,面向矿区挡墙的感知方法主要是实现挡墙的识别。文献[4]提出了二次栅格化地面分割算法,将三维数据映射于二维平面上,通过比对栅格、邻近栅格间信息值与设置阈值完成一次检测,再调整窗口尺度,滑动的完成二次检测,以实现对矿区不平整道路与挡墙交界的识别。文献[5]提出将车载激光雷达扫描的点云数据投影至二维扇形栅格图,通过步进点的设置迭代更新区域内高度信息,以避免可行驶区域的错误检测。文献[6]拟合三角网格内数据,通过方差获得交界网络及目标网络,再进一步分别从突变阈值和坡度阈值区分路面点和挡墙点。文献[7]设计了 PGBD (Probability Grid Berm Detection,基于栅格地图概率值的挡墙检测)算法,通过采用贝叶斯滤滤波器对二维高差信息构建概率网格图,再拟合矩形来完成对挡墙边界的检测。然而上述方法是基于车端视角,视野有限,且数据是在运动状态下采集的,缺乏稳定性,稀疏性较大,不能满足挡墙状态检测对精度、时效的要求。文献[8]通过融入 RANSAC(Random SampleConsensus,随机采样一致性)算法来近似曲面的几何结构,将特征点与领域点构成的空间向量夹角作为判断依据拟合平面点集,从而实现对矿区狭长道路与路沿的边缘提取。该方法基于无人机,虽然有全局的视野,但其更新频率低、采集难度大,不适用于多变的挡墙状态检测任务。
现有的挡墙状态检测方法多是基于车端、无人机传感设备采集的点云数据,视野有限、稀疏性较大,且点云数据是动态的,缺乏稳定性,不能满足挡墙状态检测对精度、时效的要求。另外,现有方法多为提取行驶道路上的挡墙边界信息,缺乏针对矿区挡墙状态完整性检测的方法。因此,本文提出了一种基于路侧激光雷达传感器的挡墙状态完整性检测方法。采用路侧激光雷达传感器采集车辆行驶区域的挡墙点云数据,经多边形滤波及点云结构化的处理后,对分布不一的挡墙目标采用滑动寻迹搜索算法,结合双阈值滤波实现用统一的模型完成对多样化挡墙全天候的动态检测,能够实时识别并标记出点云数据破损部位,为无人驾驶提供更好的安全保障,协助矿山管理人员及时了解及管理作业环境[9-10]。
1 挡墙状态完整性检测方法
基于路侧激光雷达传感器的挡墙状态完整性检测方法流程如图1所示。
1.1 区域挡墙滤波
矿区道路不规则,原始点云数据中包含起伏地面、植被等物体信息。采用分辨率较高的路侧激光雷达传感器采集车辆行驶区域的挡墙点云数据,采用 Winding Number Pnploy算法[11-12]进行背景滤波,以过滤挡墙以外的点云数据。具体步骤:在挡墙点云数据上以一定间隔按照顺序(不可交叉)标注边界点,这些边界点构成一个多边形;采用回旋计数方式统计点云数据中的每一个点在多边形内出现的次数,即记录多边形环绕点的次数,当统计环绕次数不为0时,该点即被判断为挡墙点。
1.2 栅格化地图表征点云数据
预设挡墙数据的体素形式数据为 V,具体计算步骤:计算点云数据在 x,y,z 3个方向所占空间,确定结构化区域的大小;设置三维体素边长 m,将空间均匀划分成一系列体素格子,每个格子vi(i =1;2;···; M)取自身体素中心点的xi,yi作为体素格子v1(i),v2(i)的索引;将体素格子所包围的所有点云数据 z 方向的值拟合成高斯分布,高斯分布的均值作为该体素格子的高度v3(i)。进一步将V投影到 BEV(Bird's-eye-view,鸟瞰图或俯视图)平面并构建栅格地图,每个栅格元素记录元素位置及该位置 z 方向所有体素的最大高度、最小高度及体素个数,记为P,P 2 R5(R 为实数集),从而可降低计算冗余度。
1.3 滑动寻迹搜索算法
挡墙栅格地图的坐標位置所呈现出的 BEV 视角呈带状形态分布。由于地势不同,呈现出的形状分布也不同,主要由“一”型、“L”型、“S”型等组合连接构成[13-16]。这种不规则的分布,难以用简单的规则将挡墙分割成一系列子区域进行分区域检测。鉴此,提出一种滑动寻迹搜索算法。先根据栅格地图中的挡墙区域“由面至线”提取出挡墙的骨骼线,然后沿骨骼线方向以固定步长划分子区域,在该区域骨骼线法向量方向构建包围框,再“由点拓面”搜索被检测框包围的挡墙区域。该算法将子区域的中心锁定在目标区域骨骼线上,结合法向量方向调整检测框偏置角度,使不同形状的挡墙能够沿其延伸方向被切分。具体实现步骤如下。
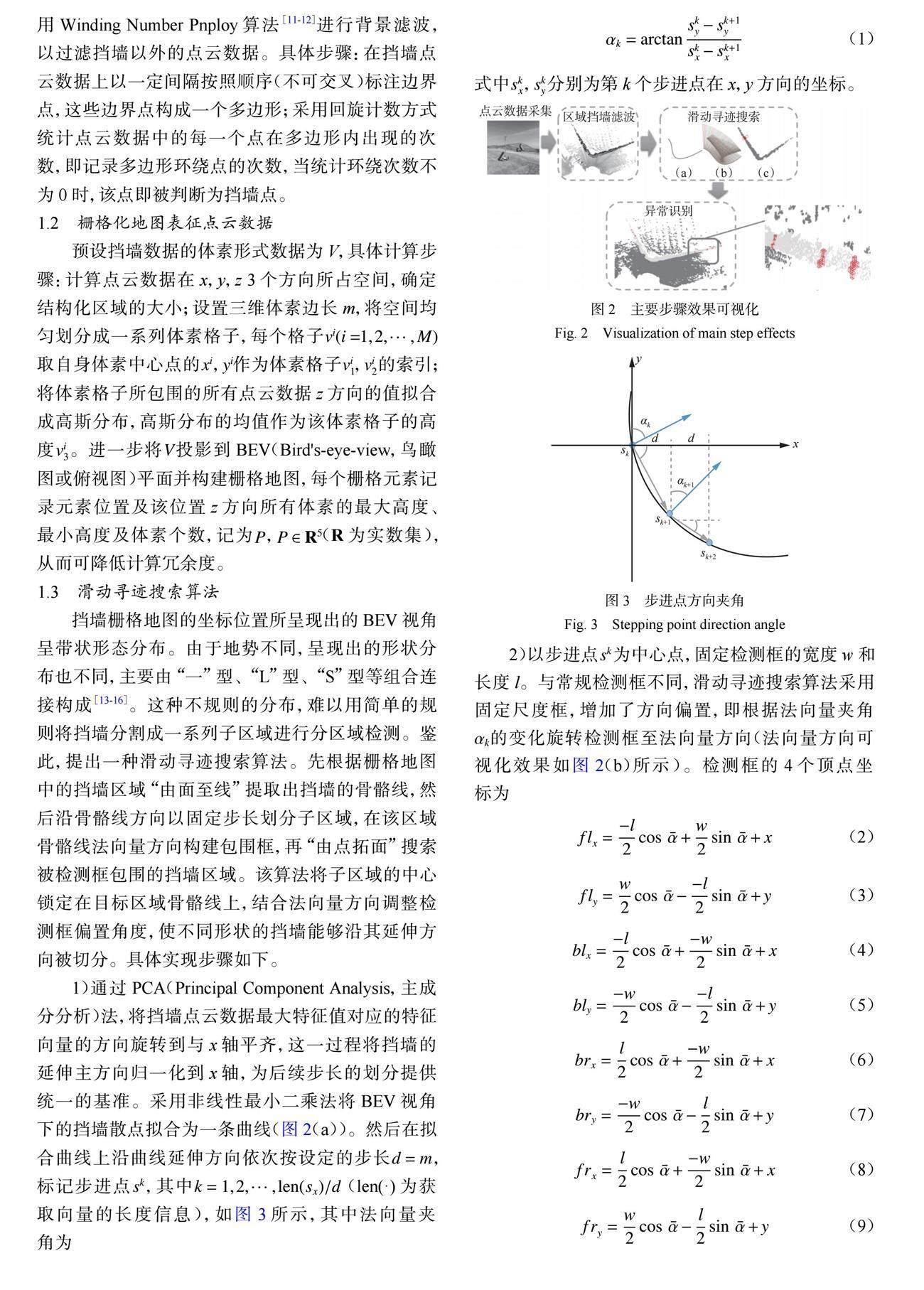
1)通过 PCA(Principal Component Analysis,主成分分析)法,将挡墙点云数据最大特征值对应的特征向量的方向旋转到与 x 轴平齐,这一过程将挡墙的延伸主方向归一化到 x 轴,为后续步长的划分提供统一的基准。采用非线性最小二乘法将 BEV 视角下的挡墙散点拟合为一条曲线(图2(a))。然后在拟合曲线上沿曲线延伸方向依次按设定的步长d = m,标记步进点sk,其中k =1;2;···;len(sx )/d(len(·)为获取向量的长度信息),如图3所示,其中法向量夹角为
式中sx(k),sy(k)分别为第 k 个步进点在 x,y 方向的坐标。
2)以步进点sk为中心点,固定检测框的宽度 w 和长度 l。与常规检测框不同,滑动寻迹搜索算法采用固定尺度框,增加了方向偏置,即根据法向量夹角αk 的变化旋转检测框至法向量方向(法向量方向可视化效果如图2(b)所示)。检测框的4个顶点坐标为
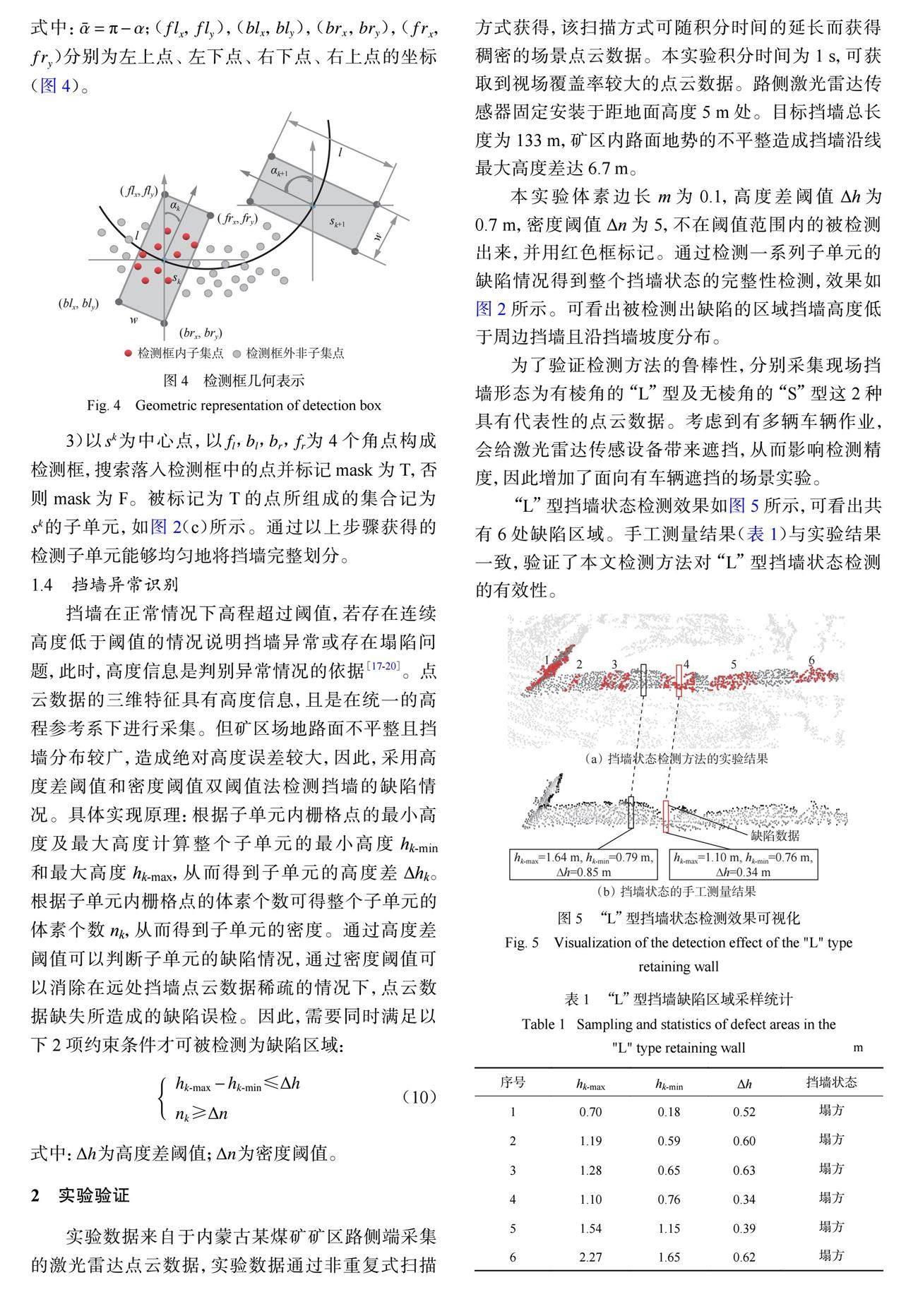
式中:?=π-;(flx,fly ),(blx,bly),(brx,bry),(frx,fry)分别为左上点、左下点、右下点、右上点的坐标(图4)。
3)以sk为中心点,以fl,bl,br,fr为4个角点构成检测框,搜索落入检测框中的点并标记 mask 为 T,否则 mask 为 F。被标记为 T 的点所组成的集合记为sk的子单元,如图2(c)所示。通过以上步骤获得的检测子单元能夠均匀地将挡墙完整划分。
1.4 挡墙异常识别
挡墙在正常情况下高程超过阈值,若存在连续高度低于阈值的情况说明挡墙异常或存在塌陷问题,此时,高度信息是判别异常情况的依据[17-20]。点云数据的三维特征具有高度信息,且是在统一的高程参考系下进行采集。但矿区场地路面不平整且挡墙分布较广,造成绝对高度误差较大,因此,采用高度差阈值和密度阈值双阈值法检测挡墙的缺陷情况。具体实现原理:根据子单元内栅格点的最小高度及最大高度计算整个子单元的最小高度hk-min 和最大高度hk-max,从而得到子单元的高度差Δhk。根据子单元内栅格点的体素个数可得整个子单元的体素个数nk,从而得到子单元的密度。通过高度差阈值可以判断子单元的缺陷情况,通过密度阈值可以消除在远处挡墙点云数据稀疏的情况下,点云数据缺失所造成的缺陷误检。因此,需要同时满足以下2项约束条件才可被检测为缺陷区域:
式中:Δh为高度差阈值;Δn为密度阈值。
2 实验验证
实验数据来自于内蒙古某煤矿矿区路侧端采集的激光雷达点云数据,实验数据通过非重复式扫描方式获得,该扫描方式可随积分时间的延长而获得稠密的场景点云数据。本实验积分时间为1 s,可获取到视场覆盖率较大的点云数据。路侧激光雷达传感器固定安装于距地面高度5 m处。目标挡墙总长度为133 m,矿区内路面地势的不平整造成挡墙沿线最大高度差达6.7 m。
本实验体素边长 m 为0.1,高度差阈值Δh 为0.7 m,密度阈值Δn 为5,不在阈值范围内的被检测出来,并用红色框标记。通过检测一系列子单元的缺陷情况得到整个挡墙状态的完整性检测,效果如图2所示。可看出被检测出缺陷的区域挡墙高度低于周边挡墙且沿挡墙坡度分布。
为了验证检测方法的鲁棒性,分别采集现场挡墙形态为有棱角的“L”型及无棱角的“S”型这2种具有代表性的点云数据。考虑到有多辆车辆作业,会给激光雷达传感设备带来遮挡,从而影响检测精度,因此增加了面向有车辆遮挡的场景实验。
“L”型挡墙状态检测效果如图5所示,可看出共有6处缺陷区域。手工测量结果(表1)与实验结果一致,验证了本文检测方法对“L”型挡墙状态检测的有效性。
同理,“S”型挡墙状态检测效果如图6所示,可看出共有6处缺陷区域。手工测量结果(表2)与实验结果一致,验证了本文检测方法对“S”型挡墙状态检测的有效性。
在有车辆遮挡路侧激光雷达场景下的挡墙状态检测效果如图7所示,可看出共有5处缺陷区域。实验结果和手工测量结果(表3)得到的挡墙状态一致。
3 结语
提出了一种基于路侧激光雷达传感器的挡墙状态完整性检测方法。采用多边形区域滤波及体素栅格化获得完整的挡墙点云数据,采用滑动寻迹搜索技术沿着挡墙延伸方向将其划分成子单元,采用高度差阈值和密度阈值双阈值法,通过检测子单元的缺陷情况得到整个挡墙状态的完整性检测。在挡墙形态为有棱角的“L”型、无棱角的“S”型及存在车辆遮挡的场景下进行了实验,实验结果和手工测量数据基本一致,说明该检测方法对不同形状挡墙的缺陷均具有较强的检测能力,能够实时识别并标记出点云数据的破损部位,可以应用于露天矿山的挡墙检测。
参考文献(References):
[1] 戴亨,张巴图.露天矿山运输无人驾驶系统作业方式[J].露天采矿技术,2020,35(5):20-24.
DAI Heng, ZHANG Batu. Operation modes of driverless system in open-pit mine haulage[J]. Opencast Mining Technology,2020,35(5):20-24.
[2] 于海旭,杜志勇,魏志丹,等.我国矿区无人驾驶技术现状与发展趋势分析[J].工矿自动化,2022,48(增刊2):82-87.
YU Haixu,DU Zhiyong,WEI Zhidan,et al. Analysis on the current situation and development trend of unmanned driving technology in mining areas in China[J]. Journal of Mine Automation,2022,48(S2):82-87.
[3] 孙溥茜.推进矿区无人驾驶,矿山生态圈协同共赢[J].机器人产业,2021(5):52-55.
SUN Puqian. Promote unmanned driving in mining areas and win-win collaboration in mine ecosystem[J]. Robot Industry,2021(5):52-55.
[4] LU Xiaowei,AI Yunfeng,TIAN Bin. Real-time mine road boundary detection and tracking for autonomous truck[J]. Sensors,2020,20(4):1121.
[5] 黄立明,李华志,余贵珍.一种基于激光雷达的露天矿区可行驶区域检测方法:CN202110581104.6[P].2021-06-25.
HUANG Liming,LI Huazhi,YU Guizhen. A drivingarea detection method based on LiDAR in open-pit mining area:CN202110581104.6[P].2021-06-25.
[6] 任良才,赵斌,杨超,等.一种无人矿卡行驶场景的路面及两侧挡墙检测方法:CN202111174666.5[P].2022-01-14.
REN Liangcai,ZHAO Bin,YANG Chao,et al. The invention relates to a detection method of road surface and retaining wall on both sides of the driving scene of unmanned mining truck:CN202111174666.5[P].2022-01-14.
[7] 孟德將,田滨,潘子宇,等.自动驾驶车辆在露天煤矿排土场的挡墙检测方法[C]. IEEE国际智能交通系统会议(ITSC),印第安纳波利斯,2021:2829-2834.
MENG Dejiang,TIAN Bin,PAN Ziyu,et al. Berm detection for autonomous truck in surface mine dump area [C]. IEEE International Intelligent Transporta- tion Systems Conference (ITSC), Indianapolis,2021:2829-2834.
[8] 王植,安世缘,邹俊,等.露天矿点云数据中台阶线提取[J].东北大学学报(自然科学版),2021,42(9):1323-1328.
WANG Zhi,AN Shiyuan,ZOU Jun,et al. Step line extraction from point cloud data of open-pit mine[J]. Journal of Northeastern University(Natural Science),2021,42(9):1323-1328.
[9] 杨荣明,丁震,杨健健,等.基于平行控制理论的矿区无人驾驶卡车仿真系统[J].工矿自动化,2022,48(11):80-83,100.
YANG Rongming,DING Zhen,YANG Jianjian,et al. Simulation system of mine unmanned vehicle based on parallel control theory[J]. Journal of Mine Automation,2022,48(11):80-83,100.
[10] 闫凌,黄佳德.矿用卡车无人驾驶系统研究[J].工矿自动化,2021,47(4):19-29.
YAN Ling,HUANG Jiade. Research on unmanned driving system of mine-used truck[J]. Industry and Mine Automation,2021,47(4):19-29.
[11] FRANKLIN W R. Pnpoly-point inclusion in polygon test [EB/OL]. [2023-08-18]. https://wrfranklin.org/ Research/Short_Notes/pnpoly.html.
[12] HORMANNK,AGATHOS A. The point in polygon problem for arbitrary polygons[J]. Computational Geometry:Theory and Applications,2001,20(3):131-144.
[13] 白运波.无人驾驶车辆多目标检测与跟踪研究[D].重庆:重庆理工大学,2021.
BAI Yunbo. Research on multi target detection andtracking of driverless vehicle[D]. Chongqing: Chongqing University of Technology,2021.
[14] 葛淑,王福云,杨军,等.智能采矿作业制定标准:用于自主采矿运输的智能车辆[J]. IEEE 智能汽车学报,2022,7(3):413-416.
GE Shu,WANG Fuyun,YANG Jun,et al. Making standards for smart mining operations: intelligent vehicles for autonomous mining transportation[J]. IEEE Transactions on Intelligent Vehicles,2022,7(3):413-416.
[15] 阮顺领,焦鑫,景莹,等.一种露天矿区非结构化道路分割检测方法[J].测绘科学,2022,47(6):204-212.
RUAN Shunling,JIAO Xin,JING Ying,et al. Road detection in mining area based on bilateral segmentation optimization network[J]. Science of Surveyingand Mapping,2022,47(6):204-212.
[16] 李宏剛,王云鹏,廖亚萍,等.无人驾驶矿用运输车辆感知及控制方法[J].北京航空航天大学学报,2019,45(11):2335-2344.
LI Honggang,WANG Yunpeng,LIAO Yaping,et al. Perception and control method of driverless mining vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics,2019,45(11):2335-2344.
[17] 刘旭,黄轩,王国军.自动驾驶的挡墙检测方法,装置及车辆:CN202211100104.0[P].2022-12-09.
LIU Xu,HUANG Xuan,WANG Guojun. Retaining wall detection method,device and vehicle for automatic driving:CN202211100104.0[P].2022-12-09.
[18] 赵斌,李金铭,唐建林.一种适用于自动驾驶车辆的挡土墙检测方法及系统:CN202111424522.0[P].2022-04-12.
ZHAO Bin,LI Jinming,TANG Jianlin. The invention relates to a retaining wall detection method and system suitable for automatic driving vehicles::CN202111424522.0[P].2022-04-12.
[19] 张明,周晓阳,郭勇,等.改进U-Net模型训练方法、露天矿道路挡墙缺口检测方法及装置: CN202211497613.1[P].2023-03-10.
ZHANG Ming,ZHOU Xiaoyang,GUO Yong,et al. Improved U-Net model training method,open pit road retaining wall gap detection method and device: CN202211497613.1[P].2023-03-10.
[20] 赖观其,郭文敬.挡土墙无损检测方法介绍[J].路基工程,2004(1):12-14.
LAI Guanqi, GUO Wenjing. Introduction of nondestructive testing method for retaining wall[J]. Subgrade Engineering,2004(1):12-14.