基于树莓派的井下水仓水位智能测控系统
2023-04-29陈海舰王唯一范锦鸽潘逸冬闫子骥吴保磊
陈海舰 王唯一 范锦鸽 潘逸冬 闫子骥 吴保磊
摘要:針对目前井下水仓水位监测方法精度较低、易受环境影响、实时性不强、对机器算力的要求较高、硬件成本较高等问题,提出了一种基于树莓派的井下水仓水位智能测控系统。该系统通过防爆监控摄像机采集水仓标尺周围水位图像,采用树莓派作为图像处理平台。首先,将采集的彩色图像转换为灰度图像,利用 Otsu 法对图像进行阈值分割,通过形态学运算去除噪声并增强图像边缘信息,进而将标尺轮廓从背景中分离出来;其次,利用 Canny 算子检测标尺边缘,并利用 Hough 变换方法提取水位线与标尺竖边的交线,得到水位线在图像空间中的坐标;然后,对水位线附近区域一定范围内的标尺数字图像进行阈值分割和滤波增强处理,再通过模板匹配法实现标尺数字识别,从而得到水位线数值;最后,将水仓水位线数值转换为电流模拟量,利用树莓派发送给水泵控制器,根据电流大小控制水泵开停,实现水仓水位智能控制。该系统具有成本较低、部署便捷、精度高、实时性好等优点,能够实现水仓水位快速精准识别与控制。
关键词:井下水仓;水位测控;树莓派;边缘检测;Hough 变换;数字识别
中图分类号: TD745 文献标志码: A
Intelligent measurement and control system of mine water level based on Raspberry Pi
CHEN Haijian1,2, WANG Weiyi3, FAN Jinge3, PAN Yidong3, YAN Ziji3, WU Baolei3
(1. CCTEG Changzhou Research Institute,Changzhou 213015, China;2. Tiandi(Changzhou) Automation Co., Ltd.,Changzhou 213015, China;3. School of Computer Science and Technology, China University of Mining andTechnology, Xuzhou 221116, China)
Abstract: The current water level monitoring methods have the problems of low precision, susceptibility to environmental impact, weak real-time performance, high requirements for machine computing power, and high hardware costs. In order to solve the above problems, a Raspberry Pi-based intelligent water level measurement and control system for underground water storage is proposed. The system collects water level images around the water tank scale through explosion-proof monitoring cameras, and uses raspberry pie as the image processing platform. Firstly, the method converts the collected color images into grayscale images, and uses the Otsu method to perform threshold segmentation on the images. The method removes noise and enhances image edge information through morphological operations, and then separates the ruler contour from the background. Secondly, the Canny operator is used to detect the edge of the scale, and the Hough transform method is used to extract the intersection line between the water level line and the vertical edge of the scale, obtaining the coordinates of the water level line in the image space. Thirdly, threshold segmentation and filtering enhancement processing are performed on the digital image of the scale within a certain range of the area near the water levelline. Then, the template matching method is used to achieve the recognition of the scale number, thereby obtaining the water level line value. Finally, the method converts the numerical value of the water level line in the water tank into a current analog quantity, and uses Raspberry Pi to send the water pump controller to control the start and stop of the water pump based on the current magnitude. The method achieves intelligent control of the mine water level. This system has the advantages of low cost, convenient deployment, high precision, and good real- time performance. It can achieve rapid and accurate recognition and control of mine water level.
Key words: mine water tank; water level measurement and control; Raspberry Pi; edge detection; Hough transform; number recognition
0 引言
矿井水是煤炭开采生产过程中的必然产物,主要由地下水渗漏、涌水、设备用水和矿井降尘用水等部分组成。矿井水流经各采区工作面、掘进工作面和巷道,最终流入井下水仓[1]。井下水仓由主水仓和副水仓2个部分构成,2个水仓交替循环使用。根据《煤矿安全规程》《煤矿防治水规定》和 MT/T 674—1997《矿井生产时期排水技术规范》等规定,为保证矿井安全,预防井下水害,水仓的空仓容量应当经常保持在总容量的50%以上[2],并设有水仓水位监测设施[3]。在煤炭开采过程中,及时准确获取水仓水位的高度信息,以确定排水泵开停,对矿井安全生产至关重要。
当前,水仓水位测量方法有人工目测法、超声波测量法、压力传感法等。人工目测法不仅易受水面起伏、个人经验影响,而且人员观测的角度往往受环境限制,导致数据精度不高;同时,人工观测数据的传输不具备实时性,需要人员定时采集,但是许多检测地点交通不便,造成人力资源浪费,安全性难以保障[4]。超声波测量法利用超声波传感器发射的超声波从观测点到水面的回波时间,根据测试环境下的声速计算观测点到水面的距离;然而,超声波传感器易受相对湿度和气温等外部环境因素影响,特别是声速的误差直接影响水位测定精度[5]。压力传感法是将压力传感器安装在最低水位以下,根据传感器所测压力进行转换计算得到水位高度[6];但矿井水中常含有煤岩渣、煤泥和乳化液等杂质,压力传感器容易被堵塞,导致观测值与实际水位高度出入较大。
随着图像处理技术的发展,采用图像处理技术对水位监控图像进行实时处理,能够快速、准确测量水位高度,实时监测水位变化情况,提高对矿井水仓水位的管理效率。目前,已有不少研究工作利用图像处理技术进行水位检测。王磊等[7]采用 YOLOv3模型从图像中检测标尺位置并将其裁剪出来,再利用ResNet网络识别图像中标尺刻度值,从而根据标尺总长及刻度值计算水位高度。 Wang Xing 等[8]逐帧处理视频中的图像,首先采用图像平滑模糊技术得到灰度图像,然后使用拐点算子提取图像的边缘特征,利用提取到的特征检测水位线、分割标尺刻度值,最后采用深度神经网络对特征进行识别,并通过标尺刻度值和预设的比例尺计算水位高度。但以上方法在应用时对机器算力的要求较高,需要配置的硬件成本相对也较高。
与 STM32和51单片机等常规嵌入式微控制器不同,树莓派不仅可以进行 IO 引脚控制,还可进行复杂的任务管理和调度,运行适配的操作系统,支持更高层次的应用[9]。在开发环境方面,树莓派支持 C、Python 等语言,还可以连接上层的应用与底层的硬件,实现物联网的云控制和云管理。在开发能力方面,树莓派体积小、成本低,具备一定的 CPU 和 GPU 计算能力,能够实现图像处理技术相关的任务与应用。因此,本文提出了一种基于树莓派的井下水仓水位智能测控系统。利用防爆监控摄像机采集水仓标尺周围水位图像,在树莓派上运行图像处理技术,获取井下水仓水位数值;通过树莓派连接水泵控制器,实现井下水仓水位智能控制。
1 系统原理
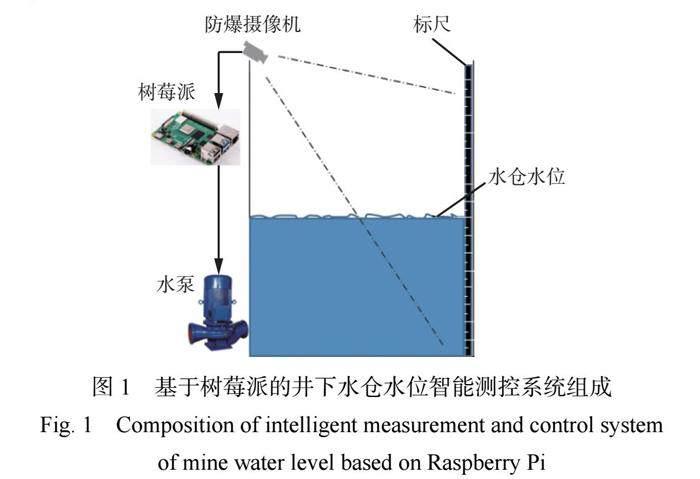
基于树莓派的井下水仓水位智能测控系统组成如图1所示。
将防爆监控摄像机安装在井下水仓顶角处,采集水仓中标尺周围水位图像,利用树莓派运行图像处理技术,获得水仓实时水位数值,并根据水仓水位变化情况及时开停水泵,实现井下水仓水位智能控制。
2 系统实现
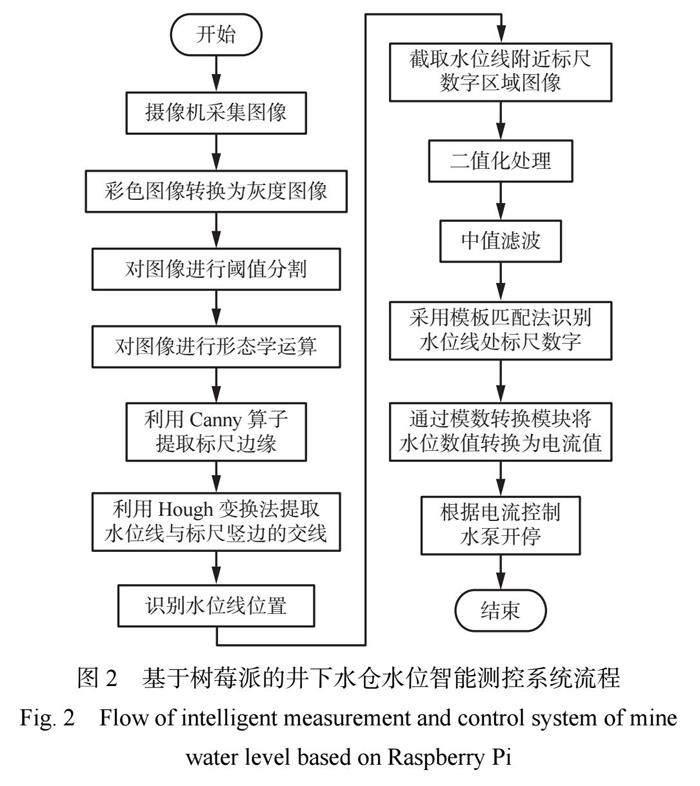
基于树莓派的井下水仓水位智能测控系统流程如图2所示。首先,将防爆监控摄像机采集的彩色图像转换为灰度图像,对图像进行阈值分割,将标尺从背景中分离出来,并运用形态学运算增强图像,再通过提取标尺边缘和检测水位线,确定水位线在图像空间中的具体位置。然后,依据检测出的水位线纵坐标,利用模板匹配法识别水位线对应的标尺数字,得到水位线数值。最后,通过模数转换模块将水位线数值转换为水泵控制器能够识别的电流模拟量数值,利用树莓派能够进行 IO 引脚控制的特点,通过树莓派将电流值发送给水泵控制器,根据电流大小控制水泵自动开停,实现水仓水位智能控制。
2.1 标尺边缘提取与水位线检测
2.1.1 标尺边缘提取
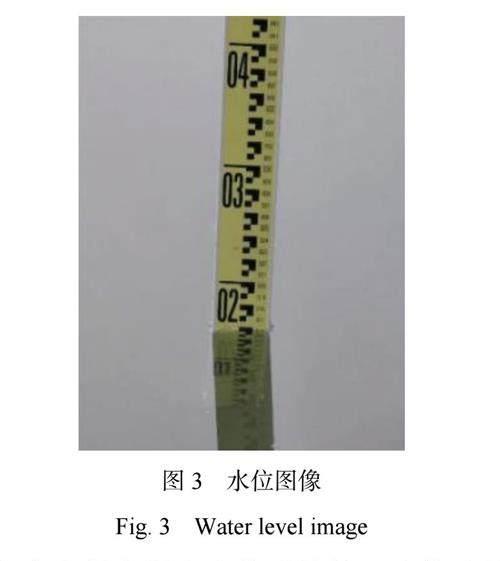
摄像机采集的标尺周围水位图像如图3所示。由于采集的圖像为彩色,为了节省内存空间,加快图像处理速度,需要将彩色图像转换成灰度图像。
为使背景与标尺分离以突出目标边缘信息,需要进行二值化处理,即设定合适的阈值,将低于该阈值的像素点设为黑,高于该阈值的像素点设为白。常用的图像二值化处理方法有双峰法、迭代法、 Niblack 法、Bernsen 法和 Otsu 法等[10]。双峰法简单易行,但当波峰不明显或图像呈单峰及多峰相混淆时,该方法在很大程度上是无效的。迭代法具备较强的稳定性和抗噪性,能够很好地保留图像的细节和特征,然而对于一些特定的图像,需要减少迭代次数,数据的微小变化就会使分割效果产生极大的反差。Nibalck法在某些环境中能够提供较好的分割效果,但依赖于预设定的邻域窗口或修正系数。 Bernsen 法是一种局部二值化算法,在处理光照不均匀的图像时有较好的效果,但对各种类型的噪声比较敏感[11]。Otsu 法能够通过最大化图像直方图的类间方差来自适应确定分割阈值,使得前景和背景之间的差异最大化,同时,该方法还考虑了图像全局信息,能够更好地捕捉图像前景和背景之间的差异,从而较好地将图像分成前景和背景2个部分[12]。因此,本文采用 Otsu法对图像进行二值化处理。
通过二值化处理将标尺从背景分离出来后,边缘轮廓细节部分不可避免会有缺失,图像中原有的噪点也会被保留,需要进一步对图像进行形态学处理。形态学处理是将二值图像视为数值集合,并使用结构元素对其进行操作。其中,腐蚀和膨胀是最基本的运算。二值图像的腐蚀变换是基于图像的连续形态腐蚀,膨胀变换是基于图像的连续形态膨胀。二者广泛应用于搜索图像中明显的极大值区域或极小值区域,以分割和连接图像中相邻的像素和消除噪声。先腐蚀后膨胀的过程称为开运算,具有去除细小物体、在纤细处分离物体和平滑较大物体边界的作用[13]。因此,本文对二值图像进行开运算,以抑制噪声,改善图像质量,突出标尺的边缘特征,形态学处理结果如图4所示。
为提取标尺边缘,本文利用边缘检测算法对开运算之后的图像做进一步处理。传统的边缘检测算子主要有 Roberts 算子、Sobel 算子、Laplacian 算子和 Canny 算子等。Roberts 算子检测水平和垂直边缘效果较好,但抗噪性相对较差。 Sobel 算子边缘检测效果较好,且对图像中噪声具有平滑作用,但同时会检测出许多伪边缘,精度不高[14]。Laplacian 算子主要用于在已知边缘像素后确定该像素是处于图像的暗区还是明区,对噪声非常敏感,且不能提供边缘方向信息[15]。Canny 算子利用非极大值抑制的方法和形态学连接操作,具有较好的抗噪性能,在图像边缘有较高的定位精度,相比其他边缘检测算子效果较好[16-18]。因此,本文采用 Canny 算子对图像进行边缘检测。先利用 Gauss 函数对图像进行平滑滤波,再计算平滑后图像的梯度幅值和方向,并对梯度幅值进行非极大值抑制,获得最终的边缘图像,如图5所示。
2.1.2 水位线检测
利用 Canny 算子进行边缘检测得到的图形下边缘与水位线非常接近,但整个标尺边缘图形由多条线段组成,无法定量表征水位线在图像中的具体位置。因此,本文进一步利用 Hough 变换方法提取标尺的竖直边缘和下边缘,进而得到水位线在图像空间中的纵坐标。
在图像空间x-y中,经过空间中任一点(xm,ym)的直线方程可表示为[19]
式中:k 为直线斜率; b 为截距。
通过点(xm,ym)的直线有无数条,分别对应不同的k和b。若将xm和ym视作常数,将参数k和 b 视为变量,则式(1)可表示为
由此变换到参数空间k-b,这个变换即图像空间中对于点(xm,ym)的 Hough 变换。该直线是图像空间中的点(xm,ym)在参数空间中的唯一方程。同理,图像空间中与点(xm,ym)共线的另一个点(xn,yn)在参数空间中也有1条直线方程:
由式(2)和式(3)可得,这条直线与点(xm,ym)在参数空间中的直线一定相交于某点(k0,b0)。由此可知,图像空间中经过点(xm,ym)和点(xn,yn)的直线上的每一点在参数空间中各自对应1条直线,这些直线都相交于点(k0,b0),而k0和b0就是图像空间中点(xm,ym)和点(xn,yn)所确定的直线的参数。根据这个特点,可利用图5中得到的边缘点,通过 Hough 变换确定连接这些点的直线方程。然而,当直线的斜率不存在时,无法在图像空间中求取直线方程,此时需要将直角坐标系转换到极坐标系,如图6所示。在极坐标系中,直线方程用极坐标可表示为[20]
式中:ρ为原点到直线的垂直距离;θ为直线与 x 轴的夹角,取值范围为?90~90?。
与直角坐标类似,极坐标中的 Hough 变换也将图像空间中的点变换到参数空间中。此时,如果存在多个点共线,必有这些点在θ取某个值θ0时,这些点的ρ近似等于ρ0。即在极坐标表示下,原图像空间中共线的点变换到参数空间后都相交于同一点,此时所得的ρ0和θ0即为所求直线的极坐标参数。
为准确提取标尺边缘与水位线,并提高 Hough 变换检测的精度和速度,在求解參数ρ和θ时,本文对标尺边缘与水位线进行解空间的约束。考虑摄像机是在固定状态下采集水位线的图像,在正常情况下,标尺边缘与水位线之间应为近似垂直的关系。因此,本文将距离相近、夹角相近的直线归为同一条直线,以消除多余直线对检测结果的影响,提高直线检测效率。利用标尺边缘和水位线的直线方程即可求出标尺竖直边缘线与水位线的交点坐标,将交点坐标转换为直角坐标后,再求取纵坐标的平均值,即可确定水位线在图像空间中的具体位置。Hough 变换直线检测结果如图7所示。
从图7可看出,Hough 变换后得到 N 条直线,从这 N 条直线中选取任意2条,标记为i和 j(i,j=1,2,…,N,i≠j)。当 N 的值很大时,不同ρ的差值绝对值 'ρi -ρj'与不同θ的差值绝对值'θi -θj'对水位线识别准确率影响较大。为提高直线检测效率,本文进行了不同参数组合取值对水位线识别准确率的影响测试,结果见表1。可看出当'ρi -ρj'取6.5~7.0、'θi -θj' 取0.13~0.19时,水位线识别准确率较高。因此,本文将该范围内的直线归为同一条直线,以消除多余直线对检测结果的影响,减少算法处理时间,提高直线检测效率。
2.2 标尺数字识别
2.2.1 水位线附近标尺数字区域图像预处理
由于摄像机采集的图像数据量通常较大,为减少图像中不相关信息带来的误差和树莓派的运算量,提高标尺数字识别的准确率,基于检测出的水位线纵坐标,截取水位线附近区域一定范围内的标尺数字图像(图8(a)),并对图像进行去噪、分割和增强等预处理,以提高截取区域图像的清晰度和对比度。采用 Otsu法选取分割阈值。为适应黑白像素点分布情况不同的图像,提高算法运行效率,在进行标尺数字图像二值化分割时,通过比对二值化后图像中的白色、黑色像素点个数,采用像素点个数少的颜色作为阈值,即如果黑色像素点个数多于白色像素点个数(图8(b)),则采用白色像素作为阈值(图8(c))。之后,使用中值滤波法将每个像素点周围邻域内的中值作为新灰度值,以去除差异较大的噪声点,使图像更加平滑,并保护图像中的边缘信息。
2.2.2 基于模板匹配法的数字识别
对于固定字体的阿拉伯数字,模板匹配是一种简单、快速且方便实现的数字识别方法。该方法为每个类别创建1个或多个标准模板,并将待识别样本与模板进行比较,通过对比样本与模板的边缘信息的对应程度,将样本归入与模板最接近的类别[21]。考虑到树莓派的计算能力和系统应用场景,本文先对预处理后的图像进行图形轮廓检测,结果如图9(a)所示(红框为图形轮廓);之后根据图形的长宽比筛选出符合阿拉伯数字特征的图像,再采用模板匹配法遍历筛选后的每个数字区域图像,输出最终匹配成功的数字,如图9(b)所示。
3 结语
为满足煤矿井下水仓水位低成本实时监测和水泵智能联动控制的需要,提出了一种基于树莓派的井下水仓水位智能测控系统。该系统利用防爆监控摄像机采集水仓标尺周围水位图像,采用树莓派作为图像处理平台。先通过 Otsu法对图像进行阈值分割,采用形态学运算进行图像增强,再利用 Canny 算子检测标尺边缘,并通过 Hough 变换检测出水位线在图像空间中的纵坐标;之后利用模板匹配法识别水位线附近标尺图像数字,得到水仓水位数值,再将其转换为水泵控制器能够识别的电流模拟量,根据电流大小控制水泵开停,实现水仓水位智能控制。该系统具有成本较低、部署便捷、精度高、实时性好等优点。
参考文献(References):
[1] 石军杰.煤矿井下水仓智能清理机的设计及关键技术研究[D].太原:太原理工大学,2022.
SHI Junjie. Design and key technology research of intelligent waster silo cleaning machine in coal mine[D]. Taiyuan:Taiyuan University of Technology,2022.
[2] 李文俊.煤矿与非煤矿山安全评价指导手册[M].徐州:中国矿业大学出版社,2006.
LI Wenjun. Guidelines for safety assessment of coal and non coal mines[M]. Xuzhou:China University of Mining and Technology Press,2006.
[3] MT/T 674—1997矿井生产时期排水技术规范[S].
MT/T 674-1997 Technical specification for drain of mine water during the period of production[S].
[4] 林王峰.基于视频图像的船舶水尺自动测量系统的设计与实现[D].厦门:集美大学,2017.
LIN Wangfeng. The design and implementation of a ship's draft automatica measurement system base on thevideo image recognition technology[D]. Xiamen:Jimei University,2017.
[5] 郭秀艳.船舶水尺吃水值检测方法研究[D].大连:大连海事大学,2014.
GUO Xiuyan. Research on detection method of ship draft[D]. Dalian:Dalian Maritime University,2014.
[6] 张亚,宗军,蒋东进,等.气泡压力式水位计现场检测装置设计与实现[J].水文,2021,41(6):60-65.
ZHANG Ya,ZONG Jun,JIANG Dongjin,et al. Design and implementation of field detection device for bubble pressure-type stage recorder[J]. Journal of China Hydrology,2021,41(6):60-65.
[7] 王磊,陈明恩,孟凯凯,等.基于深度学习算法的水位识别方法研究[J].水利信息化,2020(3):39-43,56.
WANG Lei,CHEN Ming'en,MENG Kaikai,et al. Research on water level recognition method based on deep learning algorithms[J]. Water Resources Informatization,2020(3):39-43,56.
[8] WANG Xing,CHEN Hu,WU Qinge,et al. On research of video stream detection algorithm for ship waterline[C]. International Conference on Big Data, Artificial Intelligence and Internet of Things Engineering,Fuzhou,2020:204-208.
[9] 石则斌,罗雪峰,王隐,等.基于卷积神经网络的智能垃圾分拣车[J].实验室研究与探索,2022,41(12):123-126.
SHI Zebin,LUO Xuefeng,WANG Yin,et al. Intelligent garbage sorting vehicle based on convolutional neural network[J]. Research and Exploration in Laboratory,2022,41(12):123-126.
[10] 張琪.结合边缘检测的图像二值化算法[D].长春:吉林大学,2011.
ZHANG Qi. Image binarization algorithm combined with edge detection[D]. Changchun:Jilin University,2011.
[11] 林爱萍.智能平仓机器人的视觉导航系统设计[D].成都:电子科技大学,2021.
LIN Aiping. Research on the vision navigation system of intelligent grain leveling robot[D]. Chengdu:University of Electronic Science and Technology of China,2021.
[12] 范九伦,赵凤.灰度图像的二维Otsu曲线阈值分割法[J].电子学报,2007(4):751-755.
FAN Jiulun, ZHAO Feng. Two-dimensional Otsu's curve thresholding segmentation method for gray-level images[J]. Acta Electronica Sinica,2007(4):751-755.
[13] 戴青云,余英林.数学形态学在图象处理中的应用进展[J].控制理论与应用,2001(4):478-482.
DAI Qingyun, YU Yinglin. The advances of mathematical morphology in image processing[J]. Control Theory & Applications,2001(4):478-482.
[14] 王家晨,王新房.基于ButterWorth滤波的X射线钢管焊缝缺陷检测方法[J].微型机与应用,2017,36(23):21-24.
WANG Jiachen,WANG Xinfang. Automatic detection of weld defects in X-ray based on ButterWorth filtering[J]. Microcomputer & Its Applications,2017,36(23):21-24.
[15] 段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005(3):415-419.
DUAN Ruiling,LI Qingxiang,LI Yuhe. Summary of image edge detection[J]. Optical Technique,2005(3):415-419.
[16] 陈若珠,薛彪.基于MATLAB的改进Canny算子的图像边缘检测研究[J].工业仪表与自动化装置,2014(4):113-116.
CHEN Ruozhu,XUE Biao. The research of image edge detection based on improved Canny operator of MATLAB[J]. Industrial Instrumentation and Automation,2014(4):113-116.
[17] 王植,贺赛先.一种基于Canny理论的自适应边缘检测方法[J].中国图象图形学报,2004(8):65-70.
WANG Zhi,HE Saixian. An adaptive edge-detection method based on Canny algorithm[J]. Journal of Image and Graphics,2004(8):65-70.
[18] 李静,陈桂芬,丁小奇.基于改进Canny算法的图像边缘检测方法研究[J].计算机仿真,2021,38(4):371-375.
LI Jing,CHEN Guifen,DING Xiaoqi. Research on image edge detection method based on improved Canny algorithm[J]. Computer Simulation,2021,38(4):371-375.
[19] 李小兰.基于霍夫变换的海面小目标检测方法研究[D].西安:西安电子科技大学,2022.
LI Xiaolan. Detection methods based on Hough transforms of sea-surface small targets[D]. Xi'an:Xidian University,2022.
[20] 张志强,冯伟,赵小虎,等.面向边缘计算的选煤厂刮板检测方法[J].工矿自动化,2021,47(4):92-97.
ZHANG Zhiqiang,FENG Wei,ZHAO Xiaohu,et al. Edge computing-oriented scraper detection method for coal preparation plants[J]. Industry and Mine Automation,2021,47(4):92-97.
[21] 王健.基于PHOW特征的人臉姿态识别算法研究[D].济南:山东财经大学,2016.
WANG Jian. PHOW based feature detection for head pose estimation[D]. Jinan:Shandong University of Finance and Economics,2016.