基于相对角动量的空间非合作目标机动仅测角检测方法
2023-03-09龚柏春张仁勇陈修桥
龚柏春, 金 鑫,,*, 张仁勇, 陈修桥
(1. 南京航空航天大学航天学院, 江苏 南京 210016; 2. 中国科学院空间应用工程与 技术中心, 北京 100038; 3. 中国人民解放军32032部队, 北京 100094)
0 引 言
近年来,航天技术快速发展,各国的航天活动日益频繁,近地轨道上卫星数量急剧增长,拥挤的太空环境给卫星的安全带来了威胁[1-4]。根据空间安全威胁的来源和性质,可将其分为两类:第一类源于自然环境因素,如小行星碎片撞击;第二类则来自人为威慑和威胁,如卫星武器[1-9]。因此,实现对空间非合作目标的态势感知与跟踪,对保障我国现役卫星的安全而言具有重要意义。
基于星载测量传感器实现对非合作目标的轨道机动检测已经成为了天基态势感知与跟踪领域需要突破的关键技术,已经得到了国内外的广泛关注和研究[9-12]。根据技术实现途径,现有的空间非合作目标轨道机动检测方法主要可分为两类,现综述如下。
第一类研究侧重于机动特征量的选取[13-17],不对测量方法有过高或特定的要求,如Qin等[15]根据卫星轨道半长轴的长期变化,提出了地球同步轨道、倾斜地球同步轨道和中地球轨道卫星面内轨道机动的检测方法,以及地球同步轨道卫星面外轨道机动的检测方法。Huang等[16]使用半长轴和偏心率作为检测量来判断目标是否机动,但其方法仅适用于检测在近地点或远地点沿速度方向的脉冲机动。Roberts等[17]提出了使用公开的地球同步经度数据库进行神经网络训练来预测卫星状态,以星下点的经纬度和卫星高度作为特征量进行检测,但该方法仅适用于地球同步轨道,具有较高的局限性。
第二类研究侧重于对卫星状态参数测量及数据处理方法进行探讨[18-25],以此来检测采用传统测量方法因精度不够而无法识别的轨道机动,或者直接通过特定测量/计算量的代价忽略机动存在以实现稳定跟踪。王庆瑞等[23]将距离变化率设定为检验参数,提出了基于概率判决的轨道机动检验方法,基于Neyman-Pearson准则,能够生成机动的判决门限,从而实现自适应的检验轨道机动,最终可以实现一般情况下正确率大于0.8的机动检测。Jia等[24]提出使用4颗相互协作的卫星来解决卡尔曼滤波法在目标机动后检测性能降低的问题,但该方法涉及到测量卫星相互协作的问题,过程复杂,且需要考虑到某一个或多个测量卫星无法观测时对系统的调整问题。Liu等[25]提出了联合滤波的方法,其利用主、辅助滤波器的配合消除了机动对目标跟踪的影响。可见,第二类方法计算量较大,给卫星增加了负担,因此如何用普通的跟踪滤波器对空间机动目标进行跟踪,是一个难点[26-28]。
为了解决上述问题,本文针对空间非合作目标近程态势感知任务,在构建一种新型机动检测特征量的基础上,提出利用无源光学相机仅测量角度信息的机动检测和跟踪方法。下文将在第1节和第2节中建立相对动力学模型和传感器测量模型,在第3节中设计基于新型特征量的机动检测算法,在第4节中进行数值仿真实验与性能分析。
1 相对运动动力学模型
如图1所示,建立当地垂直当地水平(local vertical local horizontal, LVLH)参考坐标系,原点在感知卫星的质心,X轴由地心指向卫星质心,Z轴垂直于轨道,Y轴满足右手定则。
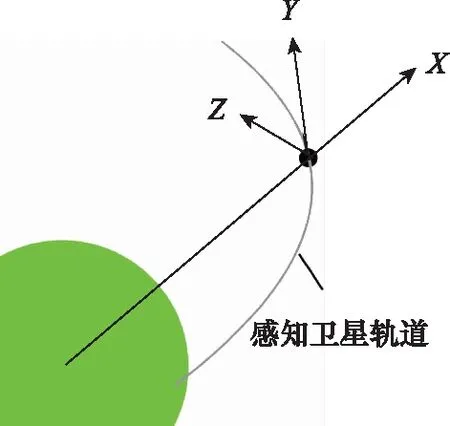
图1 地心坐标系(左)和LVLH系(右)Fig.1 Geocentric coordinate system (left) and LVLH frame (right)
在近圆轨道、两个航天器之间的距离足够小且不考虑额外摄动的情况下,可以采用线性化的Clohessy-Wiltshire方程来建模航天器之间的相对运动[29-30]。ti时刻的相对轨道状态xi可以用to时刻的状态向量x0表示:
xi=Φix0
(1)
式中:Φi为状态转移矩阵,具体形式参见文献[29]。
2 传感器测量模型
本文假设感知卫星自身的轨道和姿态已知,星上仅有无源光学相机可以用来对非合作目标进行相对测量。根据工程实际约束情况,相机偏离卫星质心安装,偏心测量如图2所示。因此,可以直接在LVLH参考坐标系下建立俯仰角和偏航角的测量模型:
(2)
式中:[x,y,z]T是目标ti时刻的相对位置;[dx,dy,dz]T为相机的偏置量;[n1,n2]T为测量误差,设其为零均值高斯白噪声。
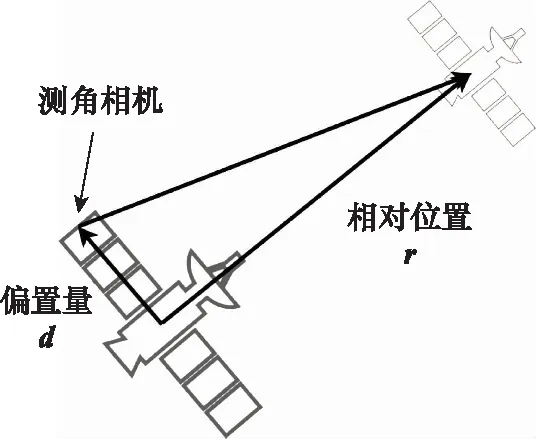
图2 相机偏置测量示意图Fig.2 Illustration diagram of camera offset measurement
3 基于相对角动量的机动检测算法
本文所研究的非合作目标轨道机动仅测角检测方法的基本逻辑关系如图3所示。首先以式(2)所示的视线角测量量结合式(1)所示的动力学模型进行滤波估计,获得非合作目标的相对轨道参数,然后基于相对轨道参数进行轨道机动待检量的构造,最后通过对待检量进行检验判别,来确定机动时间,并下达滤波系统重新初始化指令。
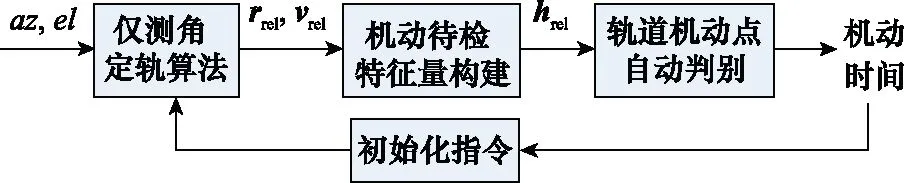
图3 算法逻辑框图Fig.3 Algorithm logic block diagram
由于本文的重点在于机动检测算法设计,所以对图3中的仅测角定轨算法不过多论述,而是直接采用Gong等在文献[31-32]中提出的方法。视线角与相对轨道参量的映射关系如下:
[rT,vT]T=f(az,el)
(3)
下文中的检测算法设计与分析过程将直接采用r和v进行。下面将重点先阐述基于相对角动量的新型机动待检特征量的构建及其敏感性分析,然后给出采用该特征量的轨道机动自动检测算法。
3.1 机动待检特征量建模及其敏感性分析
传统的轨道机动检测特征量存在敏感性差、适用性窄等问题,难以满足空间对抗对态势感知灵敏性、检测快速性的要求。因此,本文提出一种基于相对角动量概念的新型机动检测特征量。下面首先阐述该待检特征量的定义,然后对其敏感性进行分析、证明。
定义相对角动量为
hrel=rrel×vrel
(4)
式中:
(5)
卫星的机动会直接影响卫星的位置和速度矢量,而角动量的计算与物体的位置和速度矢量都具有相关性,其通过将速度和位置矢量进行叉乘的处理方式,不仅可以反映位置和速度矢量大小的变化,也可以直接通过角动量数值的变化反映位置和速度矢量方向上的变化[33],因此相对角动量对卫星机动更加敏感。此外,相对角动量参数对卫星所处轨道以及轨道上的位置没有要求,所以也将更具普适性。
同时,与地心惯性系下的轨道角动量相比,由式(4)定义的轨道系下的相对角动量对目标机动更具敏感性,现将原因分析如下。卫星携带能量有限,所以卫星机动的冲量较小[34-35],这使其机动后的短时间内的速度变化量也很小,而卫星在低地球轨道运行时速度要达到7.5 km/s量级。因此,卫星在机动后短时间内的惯性位置、速度改变量相较于其机动前的位置大小、速度大小是极小的。而以地心为参考点的角动量由相对于地心的位置和速度贡献,这使惯性系下的角动量变化也很难在噪声中被发现。然而,若取测量卫星为参考点,轨道系下的相对角动量由相对位置与相对速度贡献,大大减小了变化量与原始基础量之间的差距,因此可以有效减小相对角动量的变化量被噪声淹没的风险。
下面对上述定性分析进行数学证明。根据式(4)可以得到机动前t1时刻和机动完成后t2时刻的相对角动量分别为
(6)
当机动为脉冲机动时,由于机动时间很短,即tm≈0, 其中tm为机动时间。
因此,
(7)
则
hrel2=rrel2×vrel2=rrel1×(vrel1+Δvrel)=
rrel1×vrel1+rrel1×Δvrel
(8)
记
Δhrel=rrel1×Δvrel
(9)
与式(6)~式(9)的过程同理,可以得到地心惯性系下的角动量为
(10)

由于常见的单个脉冲所能提供的加速度大小约为0.1~1 m/s2[34-35],而卫星相对于地心的运行速度至少达到7.5 km/s量级,所以有
(11)
从而有
he1≫Δhe
(12)
式中:h=norm(h)。
因此,以地心惯性系下的角动量为检验标准,将很难在短时间内从噪声中辨别出是否机动。
相反地,
(13)
从而有
(14)
由此可以看出,相对角动量作为检验标准,将具有更优良的特性。
当考虑相对轨道估计误差时,式(8)变为
hrel2=(rrel2+nr)×(vrel2+nv)=
(rrel1+nr)×(vrel1+Δvrel+nv)=
rrel1×vrel1+rrel1×Δvrel+rrel1×nv+
nr×vrel1+nr×Δvrel+nr×nv
(15)
式中:nr和nv分别为相对位置和速度误差。
(16)
结合式(15)和式(16)可得
‖rrel1×Δvrel+nr×Δvrel‖≫
‖rrel1×nv+nr×vrel1+nr×nv‖
(17)
式(17)表明了由轨道机动造成的相对角动量的变化将显著地区别于由相对轨道估计误差引起的变化。因此,只要相对轨道估计误差满足式(17)所示的条件,相对角动量对目标机动是非常敏感的。
3.2 轨道机动点自动判别算法
若目标卫星所受到的合力并非指向感知卫星,则其相对角动量会发生变化,变化规律为
(18)
式中:τ为目标卫星B受到的相对于感知卫星A质心的单位质量力矩。
在目标卫星B没有施加机动时,τ仅为地心引力以及相关摄动力提供,因而τ的变化很平缓,即hrel的变化是连续的。换言之,如果hrel出现了突变的情况,那么一定是目标卫星B进行了机动(或被碰撞)。因此,检测hrel的突变就能判别机动。
本文设计了基于二次滑窗方差比值的自主寻找机动点方法,算法流程如图4所示。
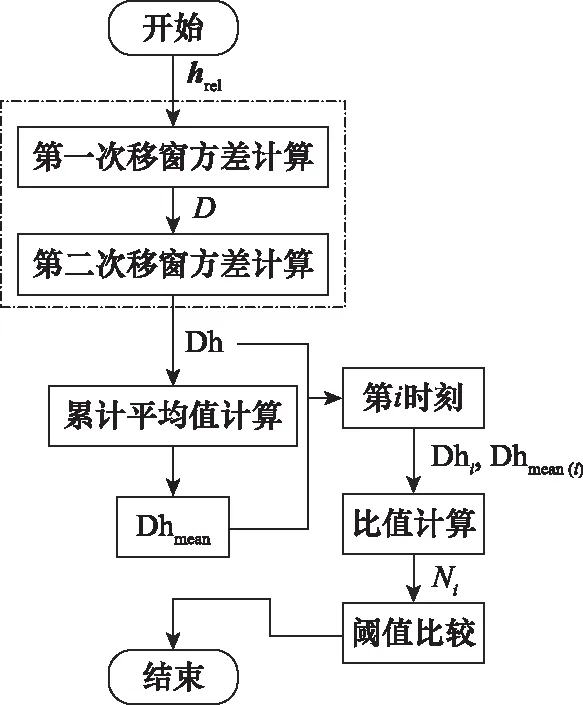
图4 机动点检测算法框图Fig.4 Framework diagram of the maneuver detection algorithm
在每完成一次滑窗内的计算后,滑窗向后移动一个格,重新计算并记录结果。将通过对相对角动量进行两次方差计算后的数据记作Dh。
该衬板需要专业工厂定做,建议在对抗冲击性能要求不大,对耐磨性能要求严格,而且形状较简单的部位铺设该衬板。但该衬板存在如下问题:① 表面不光滑,初始状态摩擦阻力较大;② 衬板直接接口不规则,沉头螺栓部位阻力大;③ 由于硬度太高,加工性能较困难。
通过计算方差的方式将相对角动量突变转化为数值大小上的突变。为了使数值突变更加明显,本文采用二次滑窗的方式来处理相对角动量。设置一个宽度为2N+1、步长为1的数据滑窗(包括待检测点ti时刻,前后再各取N个数据),N的选取与定轨精度相关。滑窗内的方差为
(19)

虽然可以从Dj序列的突变来检测机动,但由于目标星的相对位置和机动方式不同,Dj的范围差异很大,无法设置固定的阀值来判断是否机动。为了解决这个问题,首先在滤波平稳后,计算该点到检测点Dhj的平均值:
(20)
式中:Dhi表示检测点时刻tj的Dh。
然后,为了消除各种情况间的差异,计算各个时刻Dhj与Dhmean(j)的比值:
Ni=Dhj/Dhmean(j)
(21)
同时,为了缩小未机动时由滤波造成的浮动,并凸显机动时刻N值的变化,可以将Dj的首位D0替换为相对于其的无穷大,如10 000D0。为了进一步扩大机动后的N值与未机动时的N值的差异,可以将所有的N值乘以同一倍数,如200,则有
Ni,X/Y/Z≥Nf
(22)
式中:下标X/Y/Z表示Ni由LVLH参考坐标系下X、Y或Z方向计算得到,Nf为由实验得到的阀值。
若满足式(22),则说明滑窗内包含机动时刻数据,认为t=i即为机动时刻。
4 数值仿真验证
假设目标星和感知卫星都在近圆轨道上飞行,二者之间的初始相对轨道如表1所示。测角相机的安装矢量为[1,1,3]Tm,安装误差为1%,测角误差为零均值高斯白噪声,其均方差将在仿真算例中具体说明,感知卫星的姿态测量包含0.001 rad/axis的常值偏差和均方差为0.001 rad的白噪声。参考轨道的积分步长为1 s。

表1 目标卫星相对于测量卫星的初始相对轨道参数
为了验证该方法的有效性,首先设置目标卫星在t=500 s时刻分别沿LVLH参考坐标系下X轴、Y轴和Z轴添加ΔV=0.1 m/s的脉冲。之后,分别在t=500 s时刻和t=1 000 s时刻设置不同的脉冲机动。
下面针对相对角动量对轨道机动的敏感性、敏感器精度对检测的影响、机动检测相对误差和双脉冲机动下的检测结果与持续跟踪观测效果进行仿真实验验证和性能分析。
4.1 相对角动量对机动反应的仿真结果
为了验证本文所提出的相对角动量对目标卫星机动的敏感性,设置相机的测角均方差为3×10-4rad,并以两种不同相对轨迹为例进行验证。图5、图6分别为V-Bar静止轨道添加Z方向脉冲、跳跃轨道添加X方向脉冲后相对角动量的变化。脉冲添加点均在t=500 s时刻,脉冲大小为0.1 m/s。

图5 V-bar静止轨道添加Z方向脉冲后的相对角动量变化Fig.5 Relative angular momentum change on V-bar stationary orbit with the pulse added on Z-axis
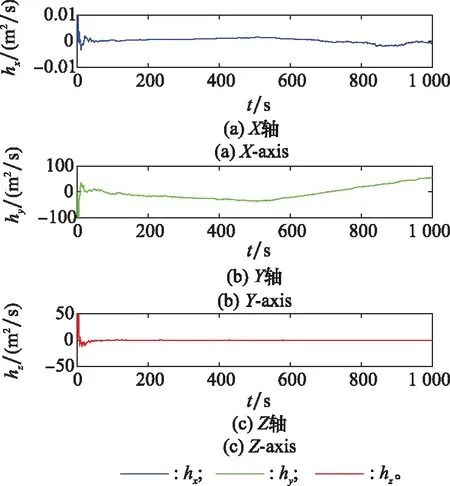
图6 跳跃轨道添加X方向脉冲后的相对角动量的变化Fig.6 Relative angular momentum change on hop orbit with the pulse on X-axis
在图5、图6中,前期为滤波收敛过程造成的数值波动,在滤波收敛之后到脉冲机动之前,各个轴上的相对角动量基本稳定。但是非常明显地,在机动脉冲施加点t=500 s之后,图5中X轴、Y轴和图6中Y轴的相对角动量发生了突变。这就表明了相对角动量对轨道机动具有优良的敏感能力。
4.2 测角精度对脉冲机动检测的影响结果
该仿真用于验证仅测角导航情况下的机动检测有效性。首先,在测角均方差为3×10-4rad的情况下得到合适的阀值Nf=Nf_-4;接下来,在取阀值为Nf_-4的情况下,进行敏感器测角均方差分别为3×10-5rad、3×10-4rad、3×10-3rad,脉冲机动大小分别为ΔV=0.095~0.100 m/s和ΔV=0.950~1.000 m/s,初始相对轨道随机、机动方向随机的300次打靶仿真,统计结果如表2所示。由表2可知,在阀值均取Nf_-4的情况下,测角均方差为3×10-4rad的机动检测效果最好,测角均方差为3×10-5rad时效果稍微减弱,测角均方差为3×10-3rad时小机动的检测效果明显下降,这是因为在使用不同精度的相机时,需要对应地调整Nf以达到最优,但本文为了说明所提方法具有一定的鲁棒性,采用了统一的Nf_-4进行不同精度相机下的仿真。
从表2中可以看出,采用针对3×10-4rad测角精度设置的最优经验阀值时,1 m/s量级的机动检测误差小于60 s的概率大于95%。这相比于文献[23]提出的基于距离变化率的概率判别方法在相近条件下的80%成功率在相近测量精度水平下得到了提高;与文献[36]所提方法的92%左右的成功率相比,本文方法也有一定程度的提高,因此本文所提出的检测方法在相关的应用场合具有较强的优势。

表2 机动检测成功率
4.3 单脉冲机动下的机动检测误差仿真结果
本文在t=700 s添加常见的大小范围为0.1~1 m/s的脉冲机动,对各种情况进行了验证。设置测角均方差为3×10-4rad,对每种情况进行了重复20次的计算,并将ΔV分别为0.1 m/s和1 m/s时的平均误差在表3中给出,其中不包含漏检的情况,包含所有机动被检测到的情况。由表3可知,本文所提出的轨道机动检测方法的相对检测误差平均值在60 s以内。
4.4 双脉冲机动下的机动检测与跟踪结果
为了验证本文方法对目标的多次机动跟踪能力,这里以椭圆绕飞为例进行仿真验证。设置测角均方差为3×10-4rad,假定目标机动两次,第一次在第500 s施加Z方向0.1 m/s的机动脉冲,第二次在1 000 s施加X方向1 m/s的机动脉冲。
仿真结果如图7和图8所示,算法给出的第一次机动时间发生在第459 s,误差为41 s,第二次机动时间发生在第951 s,误差为49 s。可见在两种情况下,目标星的机动都能被检测出来,且确定的机动时间误差较小。在检测到目标机动并重启相对轨道估计滤波器之后,估计误差均趋于稳定,实现了持续跟踪定轨。相反地,滤波器无重启情况下的估计误差是发散的。

表3 机动检测结果
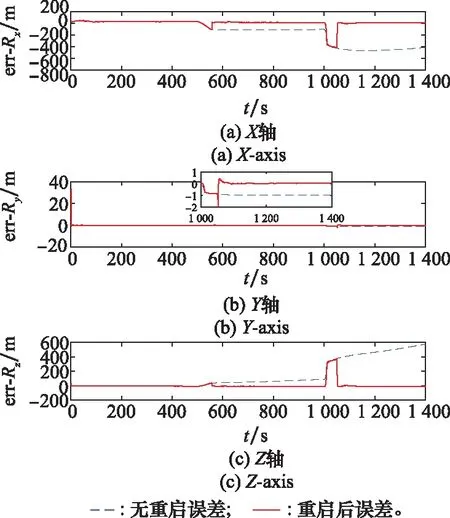
图7 相对位置估计误差对比曲线Fig.7 Comparison curve of relative position estimation error
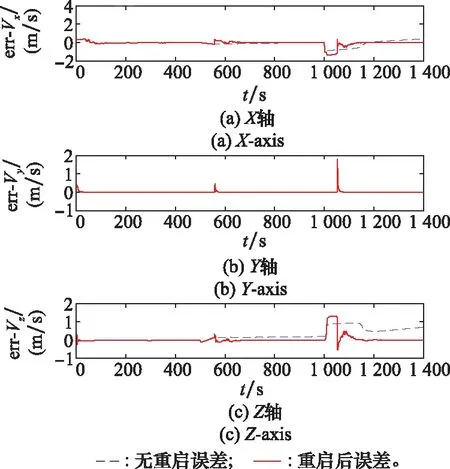
图8 相对速度估计误差对比曲线Fig.8 Comparison curve of relative velocity estimation error
5 结束语
本文针对近圆轨道非合作目标近程感知任务,提出了一种基于新型特征量的目标轨道机动仅测角检测及跟踪方法,进行了新型特征量的敏感性分析与量化证明,建立了整个算法流程框架,并进行了数值仿真验证与性能分析。主要结论如下:
基于本文所提算法能够在近程感知任务中实现对目标轨道机动的快速检测。当采用测角精度不低于3×10-4rad的无源相机进行测量时, 0.1 m/s~1 m/s量级范围内的小脉冲机动可被有效检测,机动时间检测误差在60 s以内的概率超过95%。判定目标机动之后,通过重新初始化仅测角相对导航滤波器能够实现对目标的持续、稳定跟踪。本文所提算法比现有算法的检测成功率更高,且算法更为简便、适用性更宽。
对于无先验信息情况下的椭圆轨道非合作目标机动远程感知检测,将是下一步的研究内容。
