双基地机载雷达杂波和主瓣压制干扰抑制方法
2023-03-09王安安谢文冲熊元燚王永良
王安安, 谢文冲,*, 陈 威, 熊元燚,2, 王永良
(1. 空军预警学院雷达兵器运用工程重点实验室, 湖北 武汉 430019;2. 国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
利用地海杂波的空时耦合性,机载雷达通过空时自适应处理(space-time adaptive processing, STAP)技术[1-4]能够在抑制强杂波的同时,实现对传统旁瓣压制干扰的有效对抗。但是,随着电磁环境的日益复杂和干扰技术的不断发展,机载雷达不仅面临强杂波,还面临大量无意干扰和敌方有意干扰的威胁[5-7],特别是当干扰从雷达波束主瓣进入时,干扰将严重影响机载雷达的探测性能。本文将对机载雷达如何抗自卫式压制干扰展开研究,下文中主瓣压制干扰特指自卫式压制干扰。
对于单基地雷达,最大信干噪比(maximum signal to interference plus noise ratio, MSINR)准则下的空域自适应数字波束形成(adaptive digital beamforming, ADBF)能够很好地抑制旁瓣干扰,但在存在主瓣干扰时会导致主瓣畸变和旁瓣抬升,造成目标信噪比损失和测角精度下降[8]。阻塞矩阵预处理(blocking matrix preprocessing, BMP)法[9]、特征投影矩阵预处理(eigen-projection matrix preprocessing, EMP)法[10]、和差波束法[11]及其衍生方法能够在目标与干扰相差一定角度的情况下抑制主瓣干扰,避免主瓣畸变,但从输出信干噪比(signal-to-interference-plus-noise ratio, SINR)的角度而言,这些方法的干扰抑制性能弱于ADBF方法。
针对单基地雷达无法很好地抑制主瓣压制干扰的问题,双、多基地雷达主要利用目标和干扰信号的回波特性不同,来抑制主瓣压制干扰,从而避免主瓣畸变等问题。当两部或多部雷达的空间设置满足一定条件时[12],各雷达接收到的目标回波信号弱相关,而接收到的干扰信号强相关。针对双、多基地地基雷达对抗主瓣压制干扰的问题,国内外学者提出了诸如基于时域自适应滤波的干扰对消[13-14]、基于噪声子空间投影的干扰抑制[15]、基于幅度比特征的干扰抑制[16]等众多方法[17-19]。在机载雷达背景下,强杂波信号滤除问题不可避免,目前的研究主要包括双基地机载雷达杂波建模[20-23]、杂波抑制[24-28]等。但是,现有公开文献尚未涉及强杂波背景下的双基地机载雷达抗主瓣压制干扰问题。
当同时存在杂波和主瓣压制干扰时,目标在快时间域、空域、多普勒域、空-时(多普勒)域等均被杂波或干扰所湮没,无法有效分离和检测。针对单部机载雷达难以同时抑制杂波和主瓣压制干扰的问题,本文提出了一种联合多波束匹配相消(joint multi-beam matching cancellation, JMBMC)级联空时自适应处理的双基地机载雷达杂波和主瓣压制干扰抑制方法。仿真结果表明,该方法能够有效抑制杂波和主瓣压制干扰,提高SINR。
1 双基地机载雷达回波信号模型
与传统双基地雷达在工作时“一发一收”不同,本文构建的双基地机载雷达模型同时具备单基和双基模式,具有“一发两收”的功能。将同时具有收、发功能的载机记为主机,将只有接收功能的载机记为辅机,分别用T/R和R表示。假设主、辅机的雷达天线均为正侧视放置的M行N列平面相控阵天线,阵元间距为d,雷达工作波长为λ,脉冲重复频率为fr,一个相干处理间隔(coherent processing interval, CPI)内的脉冲数为K。
以辅雷达为原点构建直角坐标系,如图1所示。红实线和蓝实线分别表示发射波束和接收波束,目标位于主、辅雷达的波束指向,灰色区域表示干扰的波束主瓣能够覆盖的空域。

图1 双基地机载雷达几何示意图Fig.1 Geometry diagram of bistatic airborne radar
图1中,L0为基线长度;VT/R和VR分别为主、辅机的飞行速度;δT/R和δR分别为主、辅机飞行方向相对基线方向的方位角;hT/R和hR分别为主、辅机的飞行高度;RT/R和RR分别为主、辅雷达到杂波散射体P的距离;θT/R和θR分别为P相对主、辅雷达的方位角;φT/R和φR分别为P相对主、辅雷达天线轴向的俯仰角。下文用下标m来区分主、辅雷达,m=1表示主雷达;m=2表示辅雷达。
1.1 目标模型
在窄带远场条件下,目标回波信号可表示为
(1)

(2)
(3)
ss(fst,m)=[1,ej2πfst,m,…,ej(N-1)2πfst,m]T
(4)

复杂外形目标的雷达散射截面(radar cross section, RCS)随观测角度的变化而存在明显差异,这时需要考虑目标复幅度与观测角度的关系。把目标定义为一个由大量、各向同性的独立散射体构成的复杂点目标,各散射体位于同一个距离分辨单元内[29],那么根据中心极限定理,目标在各个角度上的回波复幅度服从零均值复高斯分布[30]。当满足sin[(θ1-θ2)/2]≥λ/2D条件时,这两个角度上的目标回波复幅度相互独立[12]。其中,θ1和θ2分别为目标相对于主雷达和辅雷达的方位角度,D为目标尺寸。
1.2 杂波模型
假设不存在距离模糊,则第l个距离单元的杂波回波信号可表示为
(5)
对于主雷达,第i个杂波块的归一化多普勒频率可表示为
(6)
对于辅雷达,第i个杂波块的归一化多普勒频率可表示为
(7)
1.3 干扰模型
本文考虑自卫式干扰场景下的干扰信号模型,即目标携带干扰吊舱对雷达实施干扰,干扰类型为压制式噪声干扰。假设干扰的波束主瓣能够同时覆盖主、辅雷达所在空域,并且主、辅雷达处的干扰功率谱密度相等。由于干扰来向与波束指向重合,因此,干扰源施放的干扰对主、辅雷达而言均为主瓣干扰。
第l个距离单元的干扰回波信号可表示为
xj,m=aj,ms(fsj,m)
(8)
式中:aj,m表示干扰的复幅度,受干扰机发射功率、雷达天线增益和传播路径等因素的影响;s(fsj,m)为干扰的空时导向矢量,其表达式为
s(fsj,m)=st,l,m⊗ss(fsj,m)
(9)
式中:st,l,m和ss(fsj,m)分别表示干扰的时域导向矢量和空域导向矢量。且有
(10)
ss(fsj,m)=[1,ej2πfsj,m,…,ej(N-1)2πfsj,m]T
(11)

假设干扰源在某一时刻发出的干扰位于主雷达接收数据的第l个距离单元,若干扰源到辅雷达的距离较主雷达远,则同一干扰信号位于辅雷达的第l+Δl个距离单元,Δl表示由同一干扰信号到主、辅雷达的时延差折算的距离单元差。
对于同一干扰信号,有
sl,1=sl+Δl,2
(12)
那么主、辅雷达干扰的时域导向矢量之间的关系可表示为
st,l,1=st,l+Δl,2⊙[1,e-j2πΔfd,…,e-j(K-1)2πΔfd]T
(13)
因此,主、辅雷达第l个距离单元的空时采样信号可表示为
(14)
式中:nm表示主、辅雷达的接收机噪声,满足相互独立的零均值复高斯分布。
2 JMBMC-STAP方法
针对杂波背景下机载雷达抗主瓣压制干扰问题,本文提出了一种基于双基地配置的机载雷达杂波和主瓣压制干扰抑制方法。该方法首先在空域形成多个相邻波束,然后分别在多个相邻波束进行脉冲多普勒(pulse Doppler, PD)处理,将主、辅雷达的干扰信号在距离和多普勒通道配对后,再通过时域自适应滤波抑制干扰,最后联合多个相邻波束的数据进行STAP,以抑制剩余的杂波。为方便起见,将本文方法记为JMBMC-STAP。该方法处理流程图如图2所示,具体步骤如下。
步骤1相邻波束形成和PD处理
假设空域波束形成时共得到N′个波束,第n(1≤n≤N′)个波束对应的权值为ss,n,其表达式为
ss,n=[1,ej2πfs,n,…,ej(N-1)2πfs,n]T
(15)
式中:fs,n表示第n个波束对应的空间频率。
经过PD处理后的第n个波束的第k(1≤k≤K)个多普勒通道的第l个距离单元的输出信号可表示为
(16)
式中:wt表示时域的锥销权矢量;fk表示第k个多普勒通道对应的权矢量。为减小杂波对后续干扰配对的影响,通常在时域进行深加权;(·)H表示共轭转置。
步骤2距离-多普勒域干扰配对
由于干扰源在主、辅雷达之间存在多普勒频率差和距离差,同一干扰信号被接收后,分别位于主、辅雷达不同的多普勒通道和不同的距离单元,所以必须先将干扰信号在距离-多普勒域上配对后才能实现对消。由于距离差的存在,在同一帧数据中,主、辅雷达的干扰只有部分匹配。当距离差较大时,干扰甚至完全不匹配,这时需要利用辅雷达的两帧或多帧数据才能匹配主雷达的干扰。本文以主雷达数据中的干扰需要两帧辅雷达数据才能匹配为例,进行说明。

图2 JMBMC-STAP方法流程Fig.2 Flowchart of JMBMC-STAP method
主、辅雷达的同一帧数据经过步骤1处理后,第n个波束的第k个多普勒通道的输出信号可表示为
(17)
式中:L表示距离单元个数。

(18)

步骤3主、辅雷达干扰对消
将主、辅雷达数据中的干扰配对后,利用两雷达接收到的干扰的相关性,可用经辅雷达PD处理后输出信号中的干扰信号来对消主雷达中的干扰信号。
对于主、辅雷达的主波束,假设配对成功后的两个分辨单元分别为(k,l)和(k+Δk,l+Δl),则其对应的干扰信号为
Naj,1(wt⊙fk)Hst,l,1
(19)
Naj,2(wt⊙fk+Δk)Hst,l+Δl,2=Naj,2(wt⊙fk+Δk)H·
(st,l,1⊙[1,ej2πΔfd,…,ej(K-1)2πΔfd]T)=Naj,2(wt⊙fk)Hst,l,1
(20)
从式(19)和式(20)可以看出,配对后的干扰信号在距离-多普勒域上存在固定的幅度差异,而与距离-多普勒单元的位置无关。辅助波束的推导结果与主波束类似,此处不再赘述。因此,对于某一个波束,仅需一个权值即可实现对所有距离-多普勒单元干扰的抑制。
为了避免主瓣强杂波的影响,本文方法将对消权值求取对应的多普勒通道k1选在旁瓣杂波区。则第n个波束对应的干扰对消权值为
(21)
其中,
(22)

那么干扰对消后的第n个波束的第k个多普勒通道的输出信号可表示为
(23)
式中:(·)*表示共轭操作。
步骤4降维STAP
本方法采用局域联合的方式进行STAP处理,即参与自适应处理的数据位于波束-多普勒域上预设目标周围的一个矩形区域。其中,空域波束为步骤1形成的N′个波束,多普勒通道数为K′个。
经过降维STAP后的第k个多普勒通道的第l个距离单元的输出信号可表示为
(24)

(25)
3 仿真分析
本节通过仿真实验来验证所提方法的有效性。双基地雷达由主、辅两部雷达组成,两雷达系统参数一致,如表1所示。主、辅机飞行高度均为3 km,飞行方向相对基线方向的方位角分别为0°、-45°,飞行速度均为70 m/s,基线长度为120 km,主、辅雷达的波束指向分别为(90°,0°)、(45°,0°)。目标位于主雷达的第3 900个距离单元,归一化多普勒频率为0.3,信噪比为0 dB;目标位于辅雷达的第5 557个距离单元,归一化多普勒频率为0.2,信噪比为-3 dB。主、辅雷达的干噪比分别为40 dB和36.9 dB。在本节仿真参数下,杂波和干扰均不存在距离模糊。
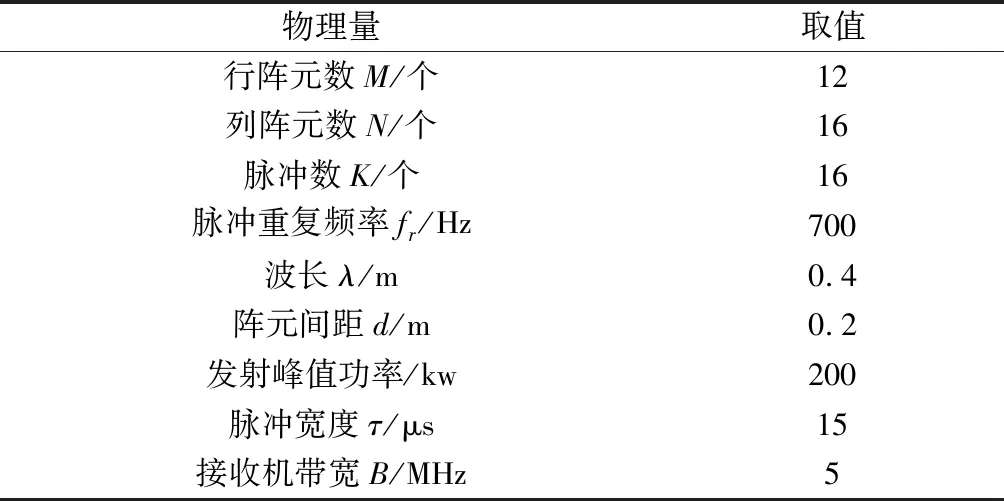
表1 雷达系统参数
实验1常规PD处理
图3分别给出了主、辅雷达的主波束经过PD处理后的距离-多普勒谱,其中在PD处理过程中加入80 dB的切比雪夫权。可以看到,压制噪声干扰分布在主、辅雷达的整个距离-多普勒域,目标湮没在杂波和干扰中。
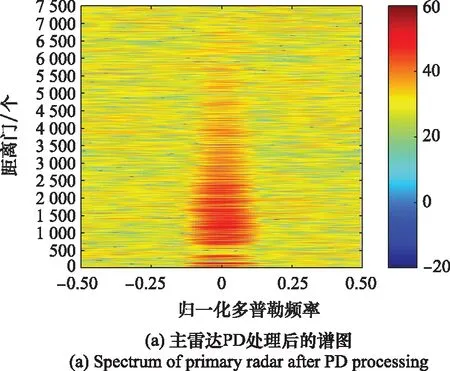
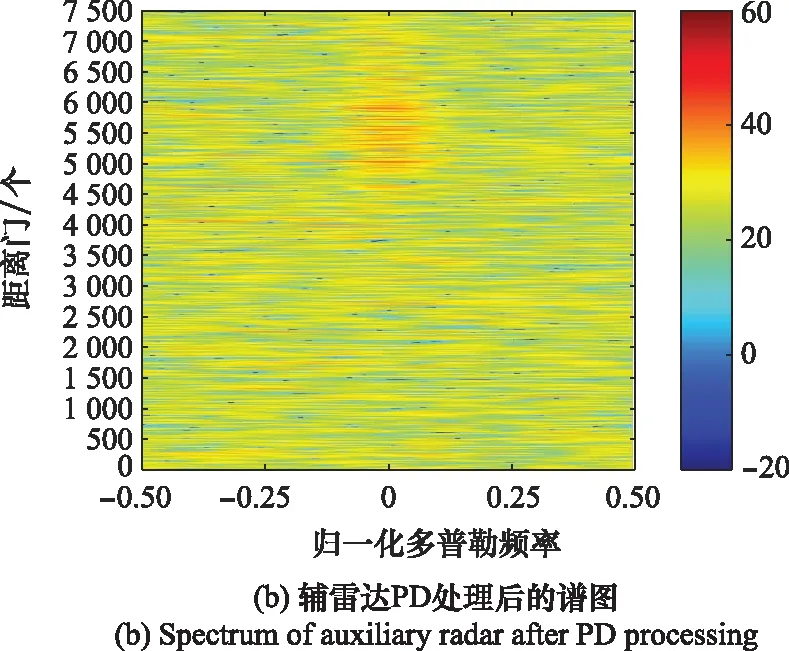
图3 PD处理结果Fig.3 Result of PD processing
实验2干扰配对


图4 干扰配对结果Fig.4 Result of jamming matching
从图5可以看出,在干扰配对前,互相关系数约为0,这表示主、辅雷达各多普勒通道的输出信号互不相关。在干扰配对后,互相关系数均大于0,主瓣杂波所在的多普勒通道的互相关系数最小,远离主瓣杂波的多普勒通道的互相关系数约为1。这表示经过深加权后,远离主瓣杂波的多普勒通道的输出信号近似相干,原因是主、辅雷达接收的干扰信号是由同一干扰源发出的。
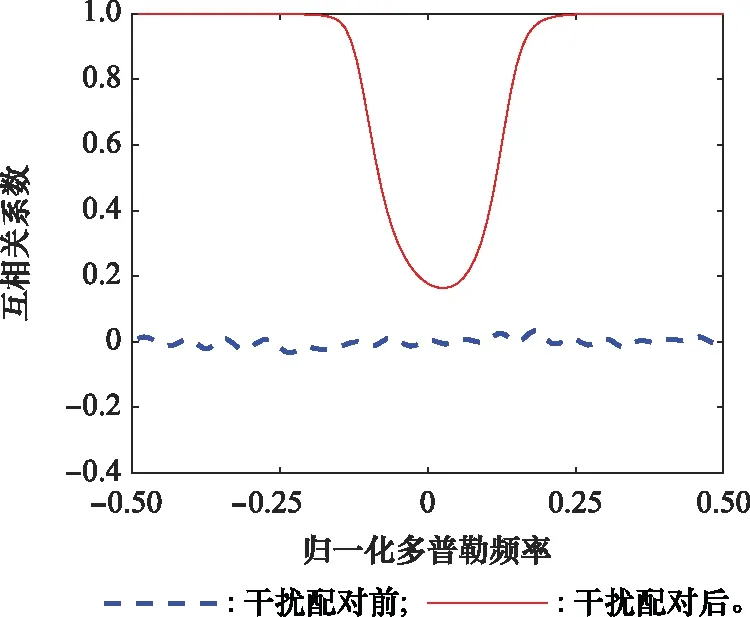
图5 干扰配对前后的互相关系数Fig.5 Cross-correlation coefficient before and after jamming matching
实验3干扰剩余
图6(a)和图6(b)分别给出了无干扰时主雷达的主波束PD处理后的谱图和有干扰时主、辅雷达的主波束干扰对消后的谱图;图6(c)和图6(d)分别给出了无干扰时主雷达的主波束经过PD处理后的第1个多普勒通道的输出功率和经过干扰对消后的第1个多普勒通道的输出功率。从图6可以看出:① 干扰对消后大部分干扰被抑制,但依然存在干扰剩余;② 杂波发生了一定程度的“扩展”,这是因为在对消时将辅雷达的杂波引入到了主雷达的数据中。从图6(c)和图6(d)可以看出,无干扰时PD处理后输出信号的平均功率约为-20.4 dB,有干扰时干扰对消后输出信号的平均功率约为-16.6 dB。因此,在干扰对消后主波束中的干扰剩余了约3.8 dB。
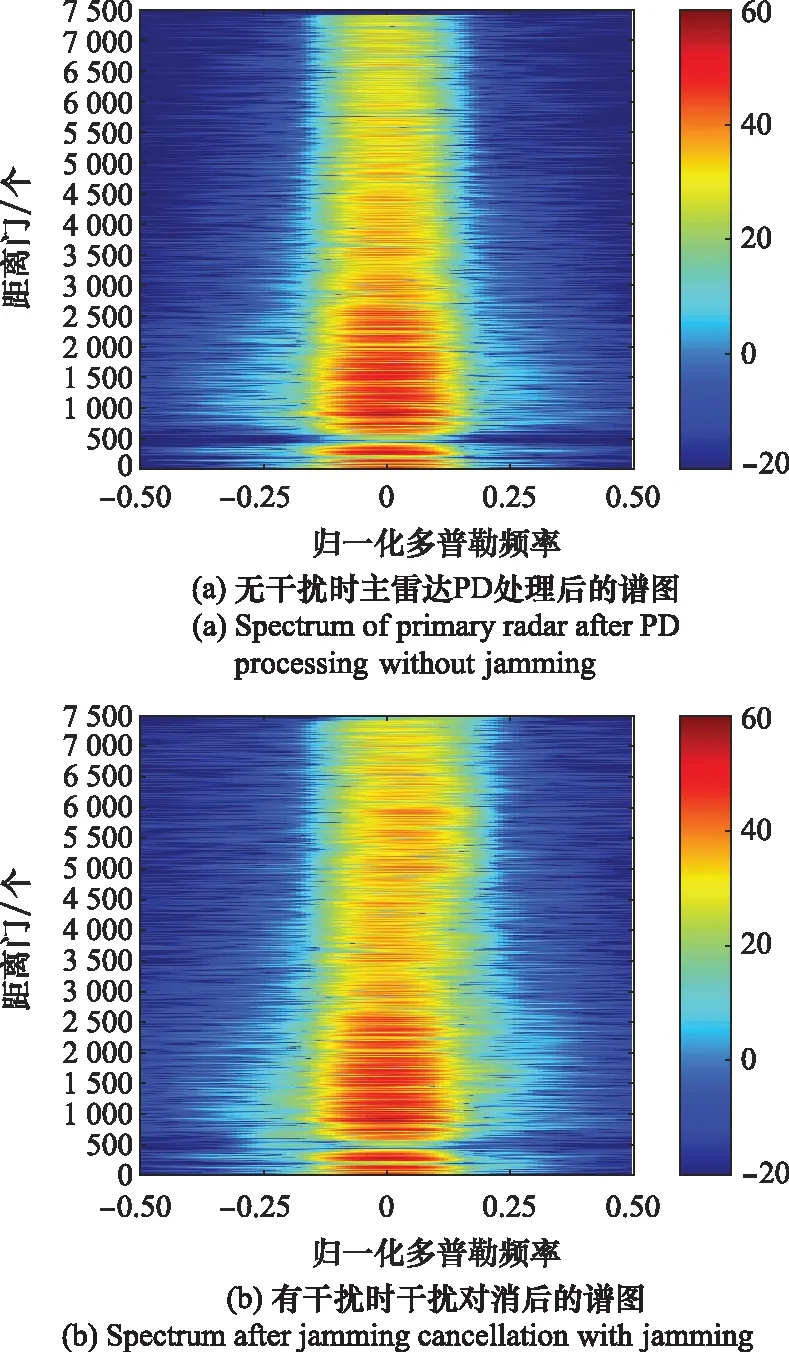
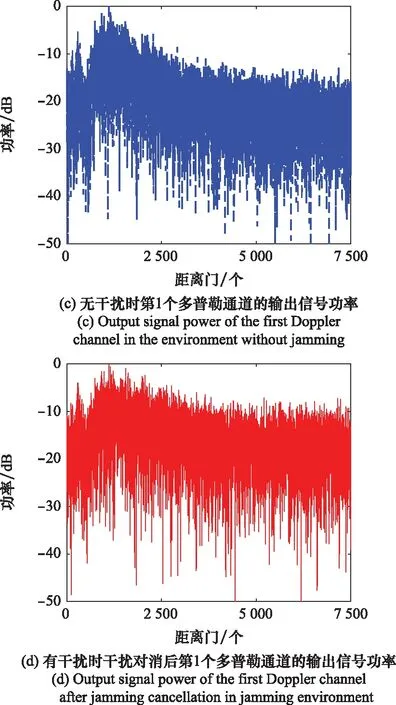
图6 干扰对消后的剩余干扰功率Fig.6 Residual power of jamming after jamming cancellation
实验4干扰抑制性能
本实验对比传统采样矩阵求逆(sample matrix inversion, SMI)方法、JDL(joint domain localized)方法和JMBMC-STAP方法的干扰抑制性能。SMI方法的训练样本个数为512,JDL方法和JMBMC-STAP方法降维后参与自适应处理的空时维数为5×5。
图7分别给出了3种方法处理后的谱图,其中图7(a)和图7(b)均为主雷达的处理结果。从图7可以看出,经SMI方法和JDL方法处理后,主瓣杂波变窄,但压制噪声干扰的能量依旧很强,这是因为当波束指向与干扰来向重合时,STAP权值不能在约束目标增益不变的同时在波束指向形成零陷,导致干扰无法被抑制。经JMBMC-STAP方法处理后,杂波和干扰均被很好地抑制。需要注意的是,图7(c)出现了两条杂波脊,其中弯曲的杂波脊为干扰对消时引入的辅雷达杂波。
图8给出了3种方法处理后目标所在多普勒通道的输出信号功率。可以看到,经JMBMC-STAP方法处理后,目标在第3 900个距离门显现,而其他两种方法处理后的目标均湮没在干扰中。

图7 3种方法处理后的谱图Fig.7 Spectrum processed by three methods

图8 目标所在多普勒通道的输出信号功率Fig.8 Output signal power of the target’s Doppler channel
实验5SINR
本实验通过统计方法来比较传统SMI方法、JDL方法和JMBMC-STAP方法处理后的SINR,图9和图10分别给出了3种方法100次蒙特卡罗仿真的SINR结果和JMBMC-STAP方法的目标功率损失。可以看到,JMBMC-STAP方法处理后的平均SINR约为21 dB,平均目标功率损失约为1.4 dB;SMI方法和JDL方法处理后的平均SINR分别为0.4 dB和-0.5 dB。因此,JMBMC-STAP方法相比SMI方法和JDL方法,在SINR方面分别改善了约20.6 dB和21.5 dB。
实验6计算复杂度
本实验以实数浮点操作次数来衡量所提方法的计算复杂度,表2给出了利用3种方法处理L个距离单元的数据的计算复杂度。其中,Kd表示划分的多普勒单元数,P=NK表示系统自由度,P′=N′K′表示局域自由度。从表2可以看出,JMBMC-STAP方法的计算复杂度远小于SMI方法,但相比JDL方法增加了约20%,增加的运算量主要体现在降维处理、空域波束形成和多普勒滤波上,原因是JMBMC-STAP方法需要对主雷达和辅雷达的数据进行上述处理,由干扰配对与干扰对消步骤增加的计算复杂度可忽略不计。

图9 信干噪比Fig.9 SINR

图10 JMBMC-STAP方法的目标功率损失Fig.10 Target power loss of JMBMC-STAP

表2 计算复杂度
4 结束语
本文建立了双基地机载雷达背景下杂波和主瓣压制干扰的空时信号模型,分析了双基地雷达干扰对消原理,在此基础上提出了一种双基地机载雷达干扰和杂波级联抑制方法。与传统SMI方法和JDL方法相比,当主瓣干扰来向与目标角度完全重合时,该方法能够有效抑制杂波和干扰,改善SINR。同时,所提方法同样适用于双基地地基雷达抗主瓣压制干扰。本文方法的缺点是仅适用于无距离模糊情况,如何实现存在距离模糊情况下的双基地机载雷达主瓣压制干扰抑制,将是下一步研究工作的重点。
