小波变换在船载海洋重力测量数据处理与分析中的应用
2023-03-09边少锋贤鹏飞
刘 备, 边少锋, 纪 兵,*, 贤鹏飞
(1. 海军工程大学电气工程学院, 湖北 武汉 430033; 2. 广西空间信息与测绘重点实验室, 广西 桂林 530001)
0 引 言
海洋重力测量作为地球重力场研究的一个重要组成部分,为海洋资源勘探、军事应用、基础海洋研究等领域提供了重要的数据支撑[1-3]。目前,海洋重力测量的主要方法包括卫星重力测量、航空重力测量和船载重力测量,船载海洋重力测量是获取高精度以及高分辨率海洋重力场信息的重要方法之一[4-8]。常规的重力测量包括静态重力测量和动态重力测量。但由于海洋环境的特殊性,静态重力测量无法满足当前海洋开发和未来海战的需求。动态重力测量以其能够快速获取高精度、高分辨率的优势成为获取海洋重力场信息的主要手段之一[9-10]。动态重力测量获取的高精度、高分辨率海洋重力场信息能够为海洋开发、海底地形反演、未来海战等提供一些关键信息[11-12]。卫星重力测量作为动态重力测量的主要手段之一,其空间分辨率目前可以达到100 km,测量精度可达到2 mGal,若需要更高精度的海洋重力场测量成果,则需要通过船载重力测量方式获取重力场数据对卫星重力场数据进行补充[13-15]。
船载重力测量由于其测量环境的特殊性,其数据处理成为制约测量成果精度的关键问题之一。对于高精度海洋重力测量数据处理与分析,文献[2-3]将Chekan-AM重力仪搭载在不同测量船只上进行测量任务,并对测量结果进行处理分析,搭载在两艘测量船上的测量精度分别为0.2 mGal、0.6 mGal,并利用测量结果给出了波罗的海地区局部大地水准面构建的初步结果。Hunegnaw等[16]对北大西洋地区的重力测量数据进行了处理分析,结果为交叉点处的标准差为4.03 mGal,经平差处理后提高到1.5 mGal。蔡劭琨等[17]将经验模态分解用于动态重力测量数据处理当中,将重力异常的内符合精度从0.88 mGal提高到了0.611 mGal。董庆亮等[18]对丹麦技术大学重力数据用于检查海洋重力测量成果的可行性进行了研究,对海洋重力测量数据的检核方法起到了补充作用。吴燕雄等[8]以激光干涉绝对重力仪为基础设计了一套船载绝对重力仪测量系统,并给出了该系统工作的误差修正方法、动态限制条件和修正精度,经修正后该系统测量精度优于±1.1 mGal。黄谟涛等[19]对海空重力测量误差进行深入分析,提出了一种适用于补偿各类海空重力仪动态效应剩余影响的通用模型,经验证,该模型将海洋重力测量的内符合精度从±9.35 mGal提高到±1.01 mGal。
对于船载海洋重力测量来说,外界环境会产生大量的噪声。如何减弱噪声、消除噪声对测量成果的影响,提高测量精度,具有非常重要的意义[20-22]。目前常用的降噪方法是采用有限冲激响应(finite impulse response, FIR)低通滤波器,FIR可以降低高频噪声,但滤波器最优参数的普适性不高[23-24]。孙鹤泉等[25]将最大重叠离散小波变换(maximum overlap discrete wavelet transform, MODWT)用于海洋重力观测航行数据的降噪中,并对该方法的可靠程度进行了验证。基于小波变换具有适用性高的优点,本文将小波变换方法引入到船载重力场数据处理分析中,并利用实测数据验证小波变换方法用于船载重力场数据降噪中的精度和可靠性。
1 船载重力测量
本文用于验证实验的船载海洋重力场数据是将dgM1型船载重力仪搭载到广海局“海洋四号”测量船上在某海域开展重力实验测量任务所测得的重力场数据。
dgM1型船载重力仪(见图1)是一款针对船载平台的动态重力仪,系统由重力仪本体、不间断电源(uninterrupted power supply, UPS)、全球导航卫星系统(global navigation satellite system, GNSS)接收机、显控设备/实时显控软件等组成。其中,重力传感器采用高精度石英挠性加速度计,姿态测量传感器采用高精度光学陀螺。重力仪在线实时完成数据采集与处理,通过可视化软件实时显示重力异常、位置、速度、姿态等信息。

图1 dgM1重力仪Fig.1 Gravimeter dgM1
该次重力实验测量任务开始前,测量人员在珠江口外海进行了仪器精度测试,完成了重复线和交叉点测量,在确保仪器精度满足要求之后,测量船再去测区开展作业,测线图如图2所示。

图2 测线图Fig.2 Tracks of gravimetry
测线包括东西测线、南北测线、45°和135°斜线。测线间距5′。其中L1、L3、Z1、Z2、B1、D1测线各有两条重复线。
2 数据处理方法及评价指标
2.1 小波变换理论
小波变换的出现弥补了傅里叶变换中的不足。小波是一种长度有限、平均值为0的波形,主要特点有:在时域具有紧支性或近似紧支性;直流分量为0。小波变换的数学公式可以表示如下:

(1)

常用的小波基函数有Haar小波、多贝西(Daubechies,Db)小波、Symlets小波、墨西哥小波(Mexican hat wavelet, Mexh)和双正交样条小波(biorthogonal spline wavelet, BSW)等。本文选择了Db小波和Haar小波两种基函数用于数据的变换处理,并对变换结果进行对比分析。
2.2 误差比率
误差比率是指先将相邻重力异常值作差,然后再将两个相邻的差值相比得到的数值,具体计算如下:
(2)
误差比率可以显示重力异常差值的变化趋势及规律。本文选取误差比率作为指标旨在验证信噪比较低的数据经过小波降噪后是否可以保留原始数据的变化规律及趋势。
3 数据处理
3.1 漂移检查
重力仪固有的一大缺点就是存在零点漂移问题。但是,只要漂移变化的幅度不大,并且存在一定的规律性,漂移就可以通过一定的方法被检测出来并加以改正。通过对数据处理分析得出该航次重力仪漂移量,如表1所示,仪器的日漂移为0.14 mGal,月漂移为4.2 mGal,该船次重力测量总漂移量为5.71 mGal。
3.2 测线内符合精度
对重复测线计算其内符合精度,计算公式如下:
(3)
式中:Mrms为重复测线测量值均方根误差;δgi1为重复测线的第一次测量的第i个点的值;δgi2为重复测线的第二次测量第i个点的值。具体各测线的内符合精度如表2所示。

表2 各测线内符合精度表

续表2
通过各测线的标准差统计结果可以看出dgM1重力仪的测量精度在海况良好的情况下可以满足科考和其他海洋勘探任务的测量精度要求。
3.3 数据降噪
本文进行数据降噪处理是对所有测线总体数据进行整体处理,小波变换方法选取了Db和Haar两种小波基函数。Db小波选择的是Db8小波基,分解层数为8层;Haar小波分解层数同样为8层。降噪处理结果如图3~图10以及表3、表4所示。图3中,数据中添加的5倍随机噪声服从均匀分布。图4中添加的正态分布随机噪声属于一般正态分布。图7中,Db-R1为5倍随机噪声与原始数据之差;Db-R11为经Db小波变换后的5倍随机噪声与原始数据之差;Db-R2为正态分布随机噪声与原始数据之差;Db-R22为经Db小波变换后的正态分布随机噪声与原始数据之差。图8中,H-R1为5倍随机噪声与原始数据之差;H-R11为经Haar小波变换后的5倍随机噪声与原始数据之差;H-R2为正态分布随机噪声与原始数据之差;H-R22为经Haar小波变换后的正态分布随机噪声与原始数据之差。

图3 原始数据与随机误差Fig.3 Original data and random error

图4 正态分布随机误差Fig.4 Normal distribution random error

图5 Db8小波变换Fig.5 Db8 wavelet transform

图6 Haar小波变换Fig.6 Haar wavelet transform

图7 Db8小波变换后误差对比图Fig.7 Error diagram of after Db8 wavelet transform

图8 Haar小波变换后误差对比图Fig.8 Error diagram of after Haar wavelet transform

图9 Db8小波变换后误差比率图Fig.9 Error ratio diagram of Db8 wavelet transform
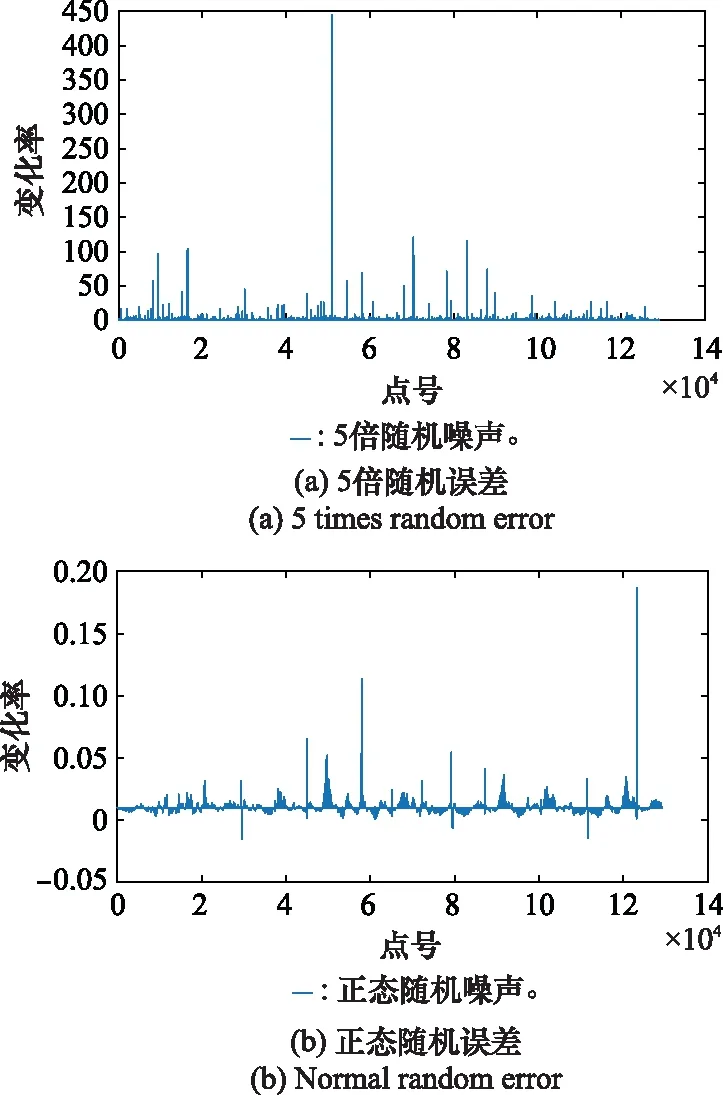
图10 Haar小波变换后误差比率图Fig.10 Error ratio diagram of Haar wavelet transform

表3 标准差统计表

表4 相对精度统计表

表5 误差比率统计表
对比原始数据、噪声数据以及经过降噪处理的数据可以发现,加入5倍随机噪声和正态分布随机噪声的数据经过Db8小波变换处理后数据绝对精度分别提高了1.024 2 mGal和9.274 7 mGal;采用Haar小波变换后,分别提高了0.804 4 mGal和9.109 5 mGal。通过图5、图6以及表3可知,经过小波变换处理后的数据相对精度至少提高56%,随着噪声的增大,最高可提高92%。对图9、图10以及表4中的误差比率变化情况进行分析,可以看出经过降噪后的重力异常数据能够很好地保持数据的基本变化趋势不变,并且经过小波变换后的数据视图更加简洁,能够较为轻松地判别测量过程中是否存在异常体导致的测量结果突变,为利用重力异常进行探测提供判别依据。
4 结 论
本文研究了小波变换方法在船载重力测量数据降噪处理与分析中的应用,将Db小波和Haar小波两种小波基函数引入到重力场数据降噪中,并利用dgM1重力仪实测数据验证降噪方法的精度与可靠性,结果表明小波变换方法可以很好地提高数据精度,加入5倍随机误差和正态分布随机误差的数据经过Db8小波变换处理后数据绝对精度分别提高了1.024 2 mGal和9.274 7 mGal,相对精度分别提高了71%和93%;采用Haar小波变换后,分别提高了0.804 4 mGal和9.109 5 mGal,相对精度分别提高了56%和91%。对误差比率变化情况进行分析可以推断,经过小波变换方法降噪后的数据可以保留重力异常变化趋势,并且更加简洁,能够为重力探测判别是否存在异常体提供判别依据。