基于实际控保录波的HVDC送端区内阀短路故障定位
2023-02-13黄明伟周仕豪
黄明伟,王 力,周仕豪
(1.长沙理工大学电气与信息工程学院,长沙 410114;2.国网江西省电力有限公司电力科学研究院,南昌 330096)
随着我国高压直流输电HVDC(high voltage direct current)工程的陆续投运,HVDC在电网中承担的大容量、远距离输电作用愈加突出[1-3]。换流器作为HVDC系统的核心设备,由于受自身器件特性约束,耐过电流能力较弱;而阀短路故障作为HVDC最严重的一类故障[4-5],其发生后必须尽快切除以保护换流器设备。但换流站内不同位置的阀短路故障与阀短路保护并不一一对应[5],导致故障后的分析往往依赖于富有经验的运行人员,不利于故障的迅速排查和检修。因此,研究不同位置阀短路故障的定位方法对于提升事故分析效率、保障HVDC系统高效运行具有重要意义。
目前,国内外学者针对HVDC换流器的故障分析与定位进行了大量研究。利用保护动作情况可实现故障定位,其中,文献[6]根据两类阀短路保护的动作情况,通过故障时段划分,提出定位故障桥的方法,但其定位精度有待进一步提高;文献[7]将故障后电气特征与时延相结合,实现逆变站接地短路故障定位,但该方案采用的延时较长,定位结果易受控制系统影响;文献[8]分析了整流站几种典型接地故障的电气量特征,并考虑控制系统的影响,提出基于直流差动保护动作的接地故障定位方案,但未能进一步展开对阀短路故障的讨论;文献[9]根据阀导通时序将阀区划分为若干区域,并根据各区域差流大小识别故障区域,但其未能结合保护动作提高定位精度;根据故障后采样窗内各桥臂电流和换流变阀侧三相电流积分的大小关系,可实现3种阀短路故障定位[10],但实际工程中不易获取各阀的桥臂电流。此外,文献[11-14]基于人工智能算法提出换流器故障诊断方法,但该类方法需要构建含众多数据的样本库,实际应用中有待进一步研究。
综上所述,针对目前常规HVDC系统阀短路故障的定位方法研究较少,且已有研究未能结合实际直流控保系统展开。本文基于实际直流控保系统录波数据,考虑阀短路故障后控保系统执行的动作逻辑,结合不同阀导通状态下的故障特征,提出整流站阀短路故障定位方法,并在RTDS和实际直流控保系统构成的闭环仿真平台进行了验证。
1 整流侧阀区保护配置
常规HVDC工程一般采用12脉动换流器作为基本单元,单个6脉动器连接一组换流变,并根据换流变二次侧联结形式,将12脉动换流器内部分为Y桥和D桥,由于阀短路故障后Y桥和D桥的故障特征类似,故本文以Y桥为例展开分析。
结合现场实际,换流器区内可能发生的阀短路故障主要包括换流变阀侧电流侧点至换流器间相间短路K1、桥臂短路K2、6脉动换流器出线短路K3及12脉动换流器出线短路K4,如图1所示。图1中,IYMAX、IDMAX分别为Y桥和D桥换流变阀侧三相交流电流的最大值;IDH、IDN分别为换流器高压端和中性线侧直流电流;VY1~VY6、VD1~VD6分别为Y桥和D桥对应的6个桥臂。

图1 换流器区测点及故障点位置Fig.1 Measuring point and fault point location in converter area
针对换流器区内阀短路故障,目前工程中一般对单个Y桥或D桥配置基于电流差动保护原理的阀短路保护[5],其动作判据为

式中:Iset1为保护动作整定值;I0为保护的启动定值,一般取为0.5倍额定电流;k为比例系数,取为0.2。
阀短路故障作为HVDC系统最严重的一种故障,对其配置的阀短路保护的动作需考虑避免第3只阀导通[5],而保护的动作将影响不同位置的阀短路故障特征。
2 阀短路故障特征分析
根据换流器工作原理可知,由于阀导通状态的不同,不同时刻发生的阀短路故障特征可能存在差异[7],因此,需探究不同阀导通状态下的故障特征。以VY1、VY2导通状态为例展开分析,并基于RTDS与实际直流控保系统构成的闭环仿真平台(下文简称仿真平台)进行验证,其中保护录波采样率为10 kHz。为便于分析,以A相电压为参考,根据直流输电原理[4]有

式中:ua、ub和uc分别为Y桥换流变阀侧三相电压;E为相电压有效值;Id为直流电流;UdR、UdI分别为整流侧和逆变侧直流电压;RL为直流回路电阻;UdRY、UdRD分别为整流侧Y桥和D桥换流变提供的直流电压;Udi0Y为Y桥换流器的直流空载电压;α为换流器的触发角。
由于VY1、VY2导通阶段对应的A相电压相角范围为[90°+α,150°+α],工程中α一般运行于15°左右[5]。为便于表示,将VY1、VY2同时导通的状态记为S1,后续导通顺序依次记为S2~S6,并将Y桥桥臂故障按桥臂编号依次记为K21~K26。以S1状态、故障角为135°时的不同位置发生阀短路故障为例展开分析。
2.1 6脉动换流器出线短路故障特征分析
当发生6脉动换流器出线K3故障时,故障后的电流回路及控保录波如图2所示。由图2可知,故障时回路1通过导通阀VY1、VY2和故障点形成AC两相短路,由于故障回路阻抗很小,IYA、IYC增大,相应地IYMAX增大;故障后Y桥Udi0Y=0,且整流侧故障后,逆变侧电压不会立即产生变化,根据式(5)可知,回路2中电流IDH、IDMAX和IDN减小,此时,Y桥阀短路保护动作。在图2(b)中,Y桥测点三相电流IYA、IYB和IYC采用标幺值,系统额定电流为5 kA。

图2 K3故障电流回路及控保录波Fig.2 K3 fault current loop,and control and protection recording wave
2.2 12脉动换流器出线短路故障特征分析
12脉动换流器出线K4短路后的电流回路及控保录波如图3所示。此时整流侧相当于完全被短路,由式(5)可知,回路2中电流迅速降为0,即IDH、IDN迅速减小;回路1通过故障点形成相间短路,Y桥IYA、IYC增大,相应地IYMAX增大,D桥导通阀所在相电流同样增大,IDMAX增大;此时,Y桥和D桥阀短路保护均动作。

图3 K4故障电流回路及控保录波Fig.3 K4 fault current loop,and control and protection recording wave
2.3 整流器桥臂短路故障特征分析
当导通状态处于S1时,若此时VY1或VY2发生阀短路故障,显然在S1阶段无故障特征,Y桥阀短路保护不会立即动作。因此需要分析非导通阀发生阀短路故障后的电气量特征。
2.3.1 桥臂VY3短路
当发生桥臂VY3短路即K23故障,故障后的电流回路及控保录波如图4所示。根据式(4)可知,在[-30°,150°]内存在uab>0,故若故障发生在[90°+α,150°]期间,此时上桥臂导通阀VY1与故障阀VY3形成AB相间短路,回路1中电流IYA、IYB和IYMAX增大,又由于AB相间短路同样会使UdRY下降,相应地UdR下降,由式(5)可知,回路2中电流IYC、IDH、IDMAX和IDN减小;若故障发生于[150°,150°+α]期间,由于uab<0,此电压恰为VY1与VY3的换相电压,相当于提前进行换相,故该阶段发生K23短路故障,并不会产生故障电流,Y桥阀短路保护不会立即动作。因此,当故障发生于[90°+α,150°]期间,故障角越接近150°,故障后A相和B相电流增大越不明显,Y桥阀短路保护可能动作。
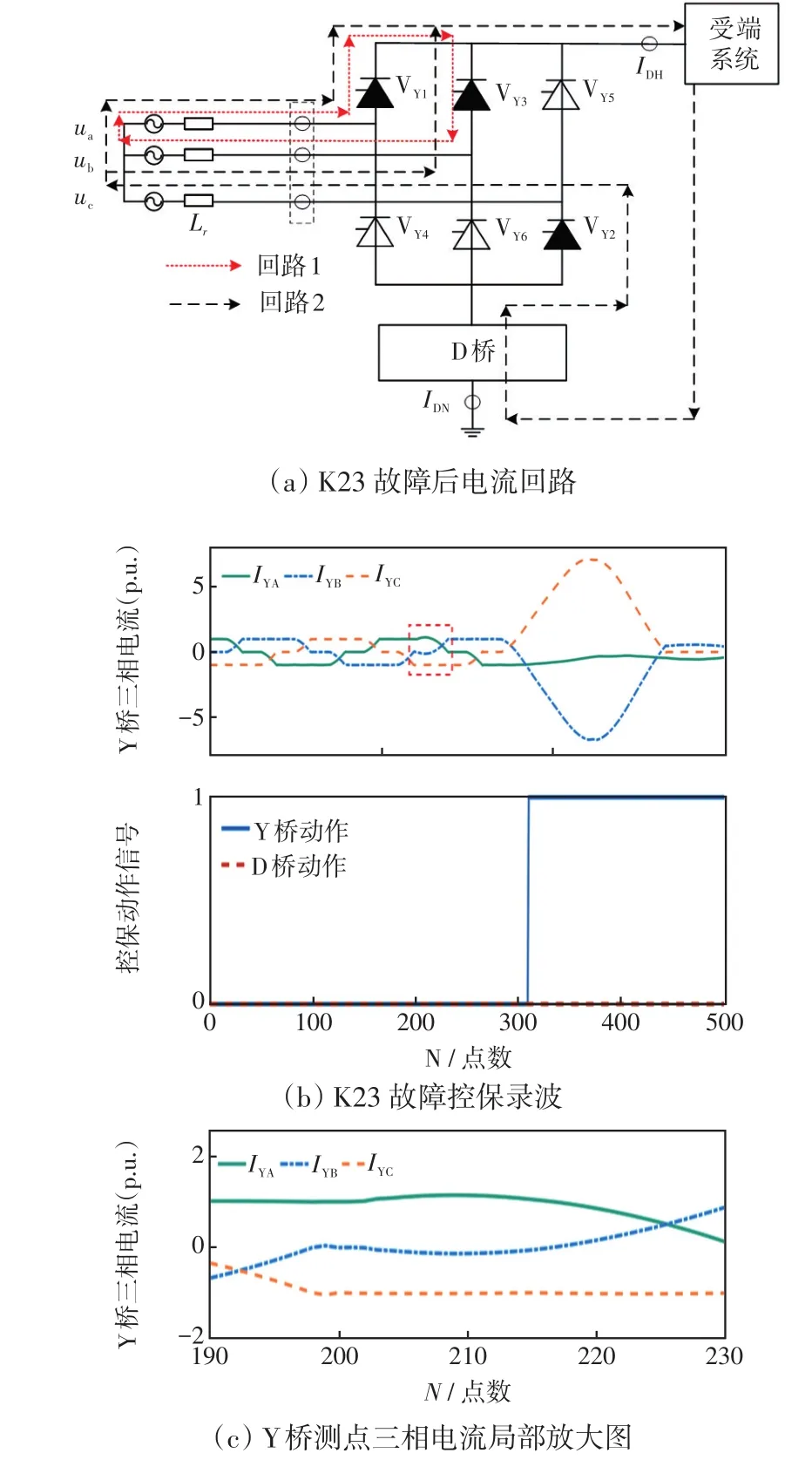
图4 K23故障电流回路及控保录波Fig.4 K23 fault current loop,and control and protection recording wave
但无论此阶段保护是否动作,经换相后,当阀导通状态为S4时即处于[270°+α,330°+α],由式(1)可知,由于此时有ucb>0,K23短路将导致CB相间短路,短路电流使Y桥阀短路保护可靠动作,因此可依靠阀短路保护动作所处阀导通阶段的三相电流的故障特征进行不同桥臂短路的定位。图4(b)、(c)为仿真平台所得结果,S1状态时发生故障角为135°的K23故障,故障电流先增大至1.13 p.u.后减小并伴随VY1与VY3换相,阀短路保护未动作,S1状态之后的故障特征与理论分析一致。
2.3.2 桥臂VY4、VY5短路
当发生桥臂VY4短路即K24故障,故障后的电流回路及控保录波如图5所示。根据式(4)可知,在[30°,210°]内存在uac>0,故在S1导通阶段,下桥臂故障阀VY4与导通阀VY2形成AC相间短路,回路1中电流IYA、IYC和IYMAX增大;此时Y桥换流变被VY4和 VY1短路,由式(5)可知,回路2中电流IDH、IDMAX和IDN减小,此阶段Y桥阀短路保护动作。若发生K25故障,由分析可知其故障特征与K24故障特征一致。

图5 K24故障电流回路及控保录波Fig.5 K24 fault current loop,and control and protection recording wave
2.3.3 桥臂VY6短路
当发生桥臂VY6短路即K26故障时,故障后的电流回路及控保录波如图6所示。由式(4)可知,在[90°,270°]内存在ubc>0,故在 VY1、VY2导通阶段,下桥臂故障阀VY6与导通阀VY2形成BC相间短路,回路1中电流IYB、IYC和IYMAX增大;BC相间短路导致整流侧直流电压下降,由式(5)可知,回路2中电流IDH、IDMAX、IDN减小。此阶段Y桥阀短路保护动作。

图6 K26故障电流回路及控保录波Fig.6 K26 fault current loop,and control and protection recording wave
2.4 交流侧相间短路故障特征分析
鉴于交流侧三相对称,此处以AB相间短路为例,故障后的电流回路及控保录波如图7所示。与K23故障类似,回路1中电流IYA、IYB和IYMAX增大,回路2中电流IDH、IDMAX和IDN减小,Y桥阀短路保护动作;闭锁故障阀组和跳交流进线开关,由于此时回路1不包含桥臂,在阀组被闭锁后,故障电流仍然存在,直至交流进线开关跳开后,故障电流才开始消失。
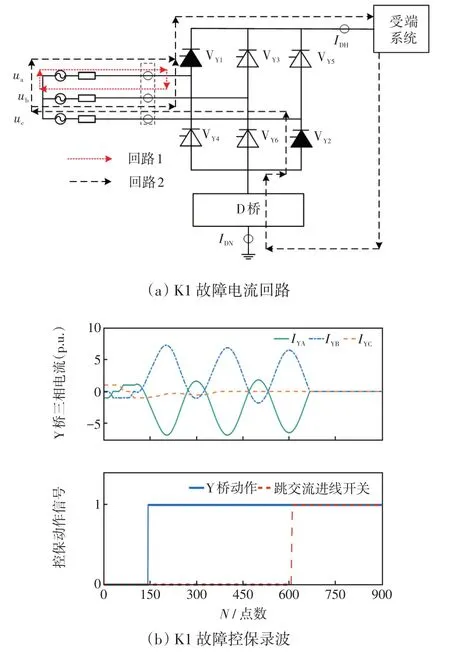
图7 K1故障电流回路及控保录波Fig.7 K1 fault current loop,and control and protection recording wave
综上,基于第2节中不同阀短路故障特征的分析可知,利用Y桥和D桥均动作可识别12脉动换流器出线短路;利用阀短路保护动作后跳交流开关的时刻对应故障桥的三相电流是否为零来识别交流相间短路。对于桥臂短路和6脉动换流器出线短路,需进一步分析S2导通阶段时的Y桥三相电流故障特征,其分析结果与S1导通阶段的结果如表1所示,表1中,一字线表示该阶段无故障特征。结合第2.1和第2.3节分析可知,①若故障发生于S1状态的初始阶段,如图3(a)和图5(a)所示,由于阀短路保护动作,闭锁故障阀的触发脉冲,且控制系统为限制直流电流增大而增大整流侧触发角α,在二者共同作用下导致故障后VY3触发脉冲被闭锁,此时无法对K24、K25、K3进行进一步区分;②若故障发生于S1状态的结束阶段,如图8所示,由于控保未能及时闭锁阀VY3触发脉冲,VY1与VY3成功换相,阀组进入S2状态,此时可结合换相前后2个状态的故障特征进一步判断K24故障。

图8 故障角为155°的K24故障录波Fig.8 K24 fault recording wave with fault angle of 155°
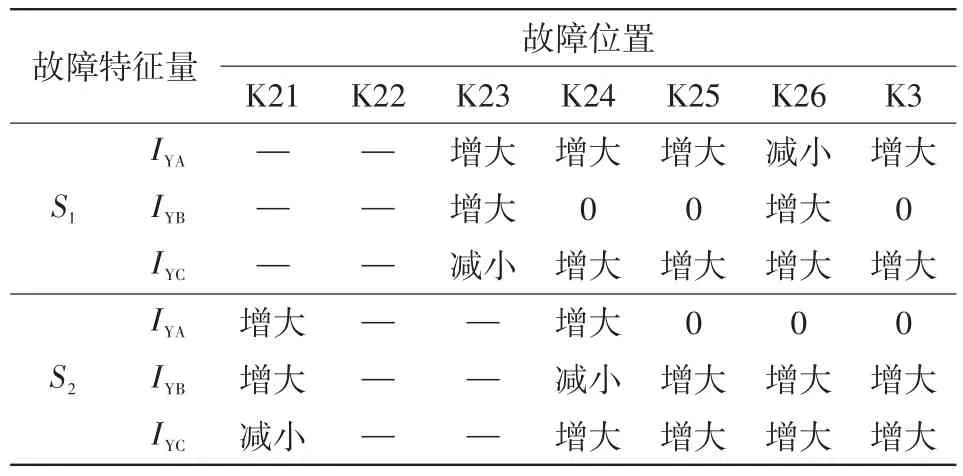
表1 S1和S2状态时不同位置的故障特征Tab.1 Fault characteristics at different positions in statesS1andS2
其余各状态与S1、S2状态具有类似的特征,限于篇幅,此处不再展开。
3 融合各桥控保动作情况和故障电流幅值特征的阀短路故障定位方法
3.1 阀短路故障特征的影响因素分析
实际工程中的阀短路保护在满足动作条件后,延时500 μs即出口动作,而后控制系统按照预设的逻辑闭锁故障阀组触发脉冲,并对非故障阀组移相,后续还会执行跳交流进线开关等操作[5]。基于第2节的分析可知,阀短路保护动作后控制系统的作用将对故障特征产生重要影响,因而需要进一步分析控制系统动作逻辑对故障特征的影响。
对于闭锁脉冲而言,以S1状态为例,当故障位置为K1时,由于其电流回路不包含桥臂,阀短路保护动作后,控制系统动作对其故障特征并无影响;若故障为K2、K3、K4,故障电流回路由故障阀和已导通的阀组成,由于晶闸管为半控器件,闭锁脉冲信号对已导通阀无影响,因此故障后无论是否发生状态切换,闭锁脉冲对故障特征均无影响。
而对于触发角α而言,由式(5)及图(8)可知,若故障后存在状态切换,阀短路保护动作并执行移相操作后,控制系统增大触发角α,换相后导通阀电流显著减小。因此,为了避免保护动作后控制系统对故障后电气量的作用,故障定位方案中应取α角增大前对应的电气量。可通过判断α角前后2个采样点差值Δα是否大于设定的阈值以实现故障数据的选取,考虑阀短路保护动作后,α角按照预设逻辑由初始值15°左右增大至90°,由大量的录波数据得出Δα取为20°较为适宜。此外,对于故障电流判据阈值的选择,应考虑躲过正常运行时可能出现的最大电流,本文将其整定为1.15 p.u.。参考现有方法,根据连续3个采样点满足判据实现故障的判断[8]。
3.2 阀短路故障定位方案设计
基于第2节及第3.1节对阀短路故障后不同位置故障特征及影响因素的分析,建立整流站阀短路故障定位流程如图9所示,其具体步骤如下。

图9 阀短路故障定位方案Fig.9 Valve short-circuit fault location scheme
步骤1根据阀短路保护动作信号判断是否进行故障定位,若存在阀短路保护动作,则进行步骤2。
步骤2根据阀短路保护动作类型判断故障所在桥,若Y桥和D桥阀短路保护均动作,则判断12脉动换流器出线发生短路故障;否则进入步骤3。
步骤3判断是否为Y桥动作,若否,则判断为D桥动作,后续流程与Y桥一致;若是Y桥动作,则继续判断交流开关信号跳变对应时刻Y桥三相电流是否均为零,若否,则判定为交流侧相间短路K1故障,若是,则进入第4步。
步骤4取故障开始至满足Δα大于20°对应时刻之间的Y桥三相电流IYA、IYB,和IYC,根据对应的IYA、IYB和IYC及脉冲触发信号PULSE确定所处阀组状态Si以决定后续流程;此处以S1为例叙述,确定阀组状态为S1后则进入步骤5。
步骤5判断状态S1中IYA是否存在连续3个点满足IYA>1.15 p.u.,若否,则判定为Y桥桥臂VY6短路K26故障;若是,则进入步骤6。
步骤6判断状态S1中IYB是否存在连续3个点满足IYB>-1.15 p.u.,若是,则可确定为Y桥桥臂VY3短路K23故障;若否,则进入步骤7。
步骤7判断所取故障数据中触发脉冲PULSE是否发生变化,若否,则确定故障为Y桥桥臂VY4短路K24故障、VY5短路K25故障或6脉动换流器出线短路K3故障;若是,则进一步根据PULSE信号判断S2状态中是否存在连续3个点满足IYA>1.15 p.u.,若是,则判断为K24故障,若否,则可确定为K25或K3故障。
4 基于实际控保系统的阀短路故障定位验证
采用本文所提故障定位方案,基于RTDS与直流控保系统的闭环仿真平台,针对S1~S6状态下不同位置发生的阀短路故障进行仿真验证。限于篇幅,以S2状态下Y桥不同位置和S1~S2状态下D桥不同位置的阀短路故障为例,其结果如附录表A1和表A2所示。在附录表A1和表A2中,K2Y1~K2Y6、K2D1~K2D6分别为Y桥和D桥对应6个桥臂短路;VSCPY、VSCPD分别为Y桥和D桥阀短路保护动作,其值为1表示动作;IYA、IYB、IYC和IDA、IDB、IDC分别为Y桥和D桥换流变阀侧三相电流,其值为各状态下电流标幺值的范围;IACSW为跳交流开关时刻对应三相电流,其值用1或0表示跳交流开关时对应三相电流是否均为0。由于在S1和S2状态下,K2Y2、K2Y3和K2D2、K2D3无故障特征,附录表A1和表A2中 K2Y2(S3)、K2Y3(S4)和K2D2(S3)、K2D3(S4)对应三相电流特征分别为Y桥和D桥对应位置在S3和S4状态的故障特征,表中一字线为该阶段无故障特征。
由附录表A1和表A2可知,当且仅当12脉动换流器出现短路会导致VSCPY和VSCPD为1,Y桥或D桥交流侧相间短路时IACSW为0,据此特征可识别12脉动换流器出线短路和交流侧相间短路;对于桥臂短路和6脉动换流器短路,根据各桥三相电流与设定的各相阈值比较加以区分。仿真平台所得结果与理论分析一致,说明本文所提定位方法可有效识别整流站区内阀短路故障。
5 结论
本文基于实际控保系统阀短路保护动作逻辑及换流器各导通状态下不同位置阀短路故障时Y桥或D桥测点三相电流的故障特征,提出整流站区内阀短路故障定位方法,主要结论如下。
(1)理论分析了4种典型区内阀短路故障的特点,其中仅12脉动换流器出口短路会导致Y桥和D桥阀短路保护均动作;换流器故障后的短路电流在阀组闭锁后,随导通阀电流过零点关断后消失,而交流侧相间短路故障电流需要控制系统执行跳交流进线开关后才会消失,从而可识别出交流侧相间短路。
(2)换流器各阀导通状态下不同桥臂短路和6脉动换流器出口短路的故障特征存在异同,可通过结合相邻导通状态的故障特征实现进一步的区分。
(3)通过仿真平台验证了融合控保数据,以及提取各阀导通状态下各桥电流幅值特征实现整流站区内阀短路故障定位方法的有效性。