基于深度学习的空间尘埃碰撞实时自动检测
2023-02-11刘润逸诸峰王健叶生毅
刘润逸,诸峰,王健, 叶生毅
南方科技大学地球与空间科学系, 深圳 518055
0 引言
星际空间中有无数尺寸微小的尘埃(Wozniakiewicz, 2017),当尘埃以km·s-1量级速度碰撞人造卫星时,20%~40%的动能被转化成热能,导致碰撞尘埃以及被碰撞的卫星表面物质的气化,产生等离子体云(Braslau, 1970),后又因等离子云中正负电荷粒子的不同反应,使得人造卫星表面的电势发生波动,最后缓慢恢复到碰撞前的状态(Pantellini et al., 2012; Tarantino et al., 2018).因此根据电场天线之间或天线与飞船之间电势差随时间变化的信号,人们试图从中寻找尘埃碰撞事件,这可以追溯到Voyager任务以及他们对土星、天王星、海王星的访问(Aubier et al., 1983; Gurnett et al., 1991; Meyer-Vernet et al., 1986).众多科学家对尘埃碰撞建立了物理实验和数值实验模型,尝试模拟整个尘埃碰撞过程,并找出其与观测到的电场天线的电势差信号的联系(Ellerbroek et al., 2017; Shen et al., 2021).但总体上因碰撞尘埃所处的环境不同,在各个模型基础上对尘埃碰撞引起的电势差信号的识别能力有限且效率不高.
星际空间中高速运动的尘埃是航天器的重要潜在威胁之一(Anders et al., 2012),参与航天任务的科学家们需要考虑空间尘埃分布来规划航天器的运行轨道以及设计标准.除此之外,星际尘埃本身在星系演化(Asano et al., 2013; Calura et al., 2017)甚至生命出现(Berera, 2017)都扮演了重要的角色.因此,借助电场天线为代表的航天器电势测量装置来识别航天器运行中遭遇的尘埃碰撞事件以分析空间尘埃分布情况在航天工程以及相应的科学研究上很有意义.相应地,识别由尘埃碰撞引起的电势差随时间变化信号成为几乎所有工作的基础,同时,对航天器电势差信号做自动化且高效的程序分析也被急切地需要,使航天器在运行过程中收集到的海量电势差信号得到实时识别.
要识别尘埃碰撞事件引起的电势差信号,现有的方法主要是在对尘埃碰撞物理过程的更好模拟基础上,去总结其对应电势差信号的普遍特征(O′Shea et al., 2017; Ye et al., 2019),再根据对应特征去人工识别或基于尘埃碰撞引起的电势差信号波形特征的机器识别,如对Solar Terrestrial Relations Observatory(STEREO)航天器电场天线电势变化的识别(O′Shea et al., 2017)和基于电压变化阈值在Cassini航天器The Radio and Plasma Wave Science(RPWS)instrument′s wideband receiver(WBR)波形数据中识别尘埃碰撞引起的电势差信号(Ye et al., 2014).但是尘埃碰撞的机制仍有争议,并且不同航天器在不同环境下的可变性使得解释其机制变得困难(Kellogg et al., 2016, 2018).这让人们无法通过统一标准来快速识别尘埃碰撞引起的电势差随时间变化信号,人工识别的效率低下.
近些年来,基于深度神经网络对信号特征提取并检测已经在地球物理领域不断推广,如对极光亚暴的自动检测(杨秋菊等, 2022),对产生机制同样仍存在争议的极光亚暴做快速检测;对地震波形的自动分类(赵明等, 2019),对从全球地震台收集到的海量数据检测波形并相应分类.通过深度学习来实现自动化检测信号的准确性和高效得到了认可.
为了快速且高精度地对航天器收集到的电势差信号识别,判断其是否由尘埃碰撞事件产生,本文使用深度卷积神经网络模型对已通过人工识别的尘埃碰撞引起的电势差随时间变化信号提取特征.电势差随时间变化信号一般由航天器上的电场天线获取,再通过训练好的模型来识别通过人工识别的电势差随时间变化信号,对其分类.本文把已有标签的数据集划分成训练集、测试集、验证集,训练集和验证集用来训练并评估模型分类效果,测试集用来衡量模型的泛化性,即在未知数据集的表现.
1 卷积神经网络
1.1 卷积神经网络算法介绍
卷积神经网络(Convolutional Neural Network,简称CNN)的核心为卷积过程.卷积过程相较于全连接神经网络,具有避免训练参数过多、提取信号空间结构的优点.卷积层将上一层的输出与当前卷积核进行卷积,叠加、加上偏置项b,再将得到的结果放入一个非线性的激活函数:
(1)

激活函数能够实现对目标函数的非线性拟合,提升模型对复杂函数的拟合能力.常见的激活函数有Sigmoid函数,tanh函数,ReLU函数.在浅层全连接神经网络中激活函数常用Sigmoid或tanh,在深层全连接神经网络中激活函数常用ReLU,它们具有较好的非线性表达能力,如:有研究利用tanh作为激活函数能够较好地预测太阳风速度的复杂变化(Yang et al., 2018),有研究利用ReLU作为激活函数用以预测地球物理测井储层参数(邵蓉波等, 2022).在卷积过程中,本文使用ReLU函数
f(x)=max(0,x),
(2)
作为激活函数,原因是ReLU函数在小于0的区间把输入值重置为0输出,在大于0的区间输出值即为输入值.它即实现了去线性化,也保证了大于0部分的梯度为1,从而避开了梯度下降计算过程中的梯度消失问题.
如图1所示,输入的1501×1信号,其中1501指信号尺寸,1指信号通道数,经过64个随机初始化生成的1×3的卷积核对信号做卷积,同时在卷积过程中对信号两端补零以保证卷积前后信号尺寸相同,信号尺寸仍为1501,通道数变为卷积层对应卷积核个数,即为64.再在同样64个随机初始化生成的1×3的卷积核对信号做卷积后,经过最大池化层,即用相邻两个数据点的最大值来做新的数据点,信号尺寸变为750,通道数不变仍为64.在多层卷积、池化的过程中,通过误差反向传播不断更新1×3的卷积核对应的权重矩阵W和偏置矩阵b,同时通过不断增加卷积核个数,即从64个逐步增加到128个,256个,512个,在压缩信号长度的同时,由于增多的卷积核,导致信号通道数的增加,每个通道上有对应的特征,以保证信号尺寸减小过程中的信息有效保留.
之后通过展开层(Flatten),将输出的多通道信号转为一维的单通道信号用以连接全连接神经网络.在全连接神经网络中通过增加Dropout层,即丢弃层,按照设定比例随机舍弃神经元之间的连接,适当降低模型对训练集数据的拟合程度,以换取泛化性的提升,即提升对以测试集为代表的真实海量数据上的拟合程度.
最后通过把输出层的神经元个数设置为1并且使用Sigmoid激活函数:
(3)
式中,x为最后一层神经元的输入值.Sigmoid函数把输入值转换到(0,1)区间,再通过归一化来给出信号,预测不同种类的各自概率:
(4)
式中zi为最后一层输出Z的第i个元素值,qi表示属于第i个种类的概率值, 在0~1之间,值越大代表对应种类的可能越大.最后一层的输出设为Z=(z1,z2,…,zn),本文因对电势差信号检测,判断其是否为尘埃碰撞引起的电势差信号,因而n=2.
卷积神经网络在提取数据结构信息上有显著优势,并且相较于全连接神经网络,相同情况下卷积神经网络的参数数量明显少于全连接神经网络的参数数量.VGGNet(Kim et al., 2016)是牛津大学的视觉几何小组(Visual Geometry Group, VGG)在2014年提出的一种深度卷积神经网络,在提取信号局部结构特征得到应用,如通过学习复杂空间粒子样本图像集的特征细节,对煤尘颗粒的分类(Wang et al., 2021).在本文关注对象信号,即电势差随时间变化的信号,同样有局部结构特征,且具有一维的结构特征,因此本文改造了VGGNet深度卷积神经网络,使其适用于一维信号.具体模型如图1所示.
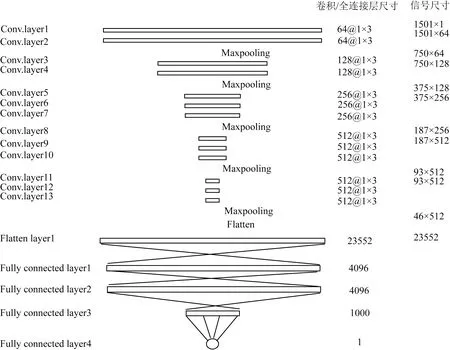
图1 深度卷积神经网络结构图
1.2 损失函数
损失函数衡量模型的预测值与真实值的误差.在训练集上损失函数的值称为训练误差,用损失函数是否随着训练过程变小来衡量训练过程是否收敛.在测试集上的损失函数值称为测试误差,与能否准确预测测试集样本紧密相关.
在监督学习中有分类和预测两大类问题.本文需要解决的是判断电势差信号是否由尘埃碰撞事件引发,因此属于分类问题,具体为二分类问题.尘埃碰撞引起的电势差信号的标签为1,非尘埃碰撞引起的电势差信号标签为0.分类问题最常使用的损失函数是交叉熵函数,其中“交叉熵”的定义如下:
L(x)i=-[yiln(fi(x))+(1-yi)ln(1-fi(x))],
(5)
式中yi为第i个信号的标签值,fi(x)为神经网络对第i个信号给出的预测值.
2 实际算例
2.1 数据来源和预处理
本文数据来源为MAVEN任务航天器.MAVEN任务,全称为Mars Atmosphere and Volatile Evolution,是美国宇航局火星侦察计划的一部分,由美国宇航局总部资助,于2013年11月启动,将探索火星高层大气、电离层及其与太阳风的相互作用.其下的一个载荷LPW,全称为Langmuir Probe and Waves,记录了航天器电位、电场波形等随时间变化的数据(Andersson et al., 2015).
本文所用数据是2015全年LPW的电势差信号.2015年大部分时间内,MAVEN航天器的轨道高度在距离火星表面高度100~300 km,而火星高空尘埃层的中心为距离其固体表面高度45~65 km(Guzewich et al., 2013).航天器所处轨道尘埃密度有限,这在前面的理论分布以及其他学者的人工识别都得到了支持(Pabari, 2017).这也在客观上导致了尘埃碰撞引起的电势差信号远少于非尘埃碰撞引起的电势差信号.
由于LPW记录的电势差随时间变化是连续的,为把不同的尘埃碰撞事件引起的电势差信号分离,本文根据1501×1的信号长度来分离信号.由于采样频率为65536 Hz,单个电势差信号对应的时长为22.9 ms.常见的由尘埃碰撞引起的电势差信号时长在10 ms左右(Meyer-Vernet et al., 1986),22.9 ms足够记录完整的由尘埃碰撞引起的电势差信号.常见尘埃碰撞引起的电势差信号(在航天器自身电势约为0或略大于0的情况下)由三部分组成,电子从碰撞处逃逸引起的pre-spike,即电场天线电势差的快速下降;离子从碰撞处逃逸引起的main peak,电场天线电势差的快速上升;最后的恢复相,电场天线因与周围等离子体相互作用而缓慢恢复到尘埃碰撞前水平.但影响电势差波动具体形状的因素有很多,如航天器自身电势,航天器所处环境等离子体密度,德拜长度,碰撞尘埃的速度和尺寸,在航天器上碰撞发生位置.电势差信号的极性、三个相的时间长度甚至是否缺失都受这些因素的影响,具体可以参见对卡西尼号RPWS由尘埃碰撞引起的天线信号的理解,即Understanding Cassini RPWS Antenna Signals Triggered by Dust Impacts(Ye et al., 2019).本文的数据筛选除了分析电势差信号本身波形之外,还结合了其他因素进一步筛选,并经过人工确认.本文使用的数据中共有7200个尘埃碰撞引起的电势差信号和7200个非尘埃碰撞引起的电势差信号.部分电势差信号示例见图2.
在众多影响因素中,航天器自身电势以及航天器所处环境等离子体密度对电势差信号波形的影响最为明确(Ye et al., 2019).图2中左列为尘埃碰撞引起的电势差信号,从上到下(a1)和(a5)对应的是航天器自身电势约为0或略大于0的情况,电势差快速增大再回落.(a2)到(a4)对应的是航天器自身电势明显为负的情况,电势差快速下降再缓慢恢复至尘埃碰撞发生前水平.而从(a2)到(a4)电势差快速下降到缓慢恢复的恢复相长度从短到长,对应的是环境等离子体密度从高到低(Ye et al., 2019).而图2中右列对应的非尘埃碰撞引起的电势差信号(噪声),即Non-Dust Impact Signal,其来源较尘埃碰撞引起的电势差信号更多,如2013年对欧空局ESA的Juice,即Jupiter Icy Moons Explorer,其Langmuir Probe噪声来源的分析(Odelstad, 2013).本文对非尘埃碰撞引起的电势差信号(噪声)不做细分,统一归为非尘埃碰撞引起的电势差信号.
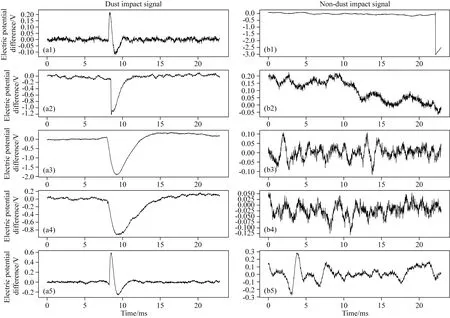
图2 部分电势差信号示例图
值得一提的是,闪电也是引起电势差发生波动的潜在来源之一,但本文使用的电势差信号可以排除由闪电诱发的可能性.地球大气层发生闪电,其生成的电场相应诱发的单个电势差信号时长在10 μs量级(Johari, 2017),远小于本文研究对象——单个时长在10 ms量级的电势差信号;除了电势差信号时长差距悬殊,闪电诱发的电势差信号波形特征也和尘埃碰撞事件诱发的电势差信号波形特征有显著不同(Johari, 2017).对于不同行星上的闪电,以太阳系的各个行星为例,成因有所不同(Fischer et al., 2011).火星不满足发生类似地球闪电的大气条件,其“闪电”的潜在来源为沙尘暴期间的放电现象(Fischer et al., 2011).但其是否发生仍然存在争议(Melnik and Parrot, 1998; Gurnett et al., 2010).即使火星沙尘暴期间的放电现象存在,例如实验模拟结果(Krauss et al., 2003), 放电过程导致的电势差快速上升下降和尘埃碰撞事件诱发的由三部分结构组成的电势差信号仍有明显区别.
在深度卷积神经网络模型训练过程中,需要寻找最优解,即最大/最小值,因此需要通过梯度下降法来确定最大/最小值的位置.但是未归一化的数据会导致在大多数位置上的梯度方向并不是最优的搜索方向,这会导致训练轮次总数的明显增加.如果把数据归一化为相同尺度,大部分位置的梯度方向近似于最优搜索方向,使在梯度下降法求解时,每一步梯度的方向都基本指向最小值,大大提升训练效率.(邱锡鹏, 2020)归一化过程见(6)式:
(6)
式中,vi指一个信号第i个数据点,max(vi),min(vi)分别指信号中1501个数据点的最大值最小值,即把信号中1501个数据点都统一归一化.最后按7∶1∶2的比例来把所有信号划分为训练集、验证集、测试集.
2.2 实验步骤与训练参数
为了证明训练的深度卷积神经网络可以成功区分尘埃碰撞引起的电势差信号与非尘埃碰撞引起的电势差信号,本文把经过预处理的包含10080个带标签的电势差信号的训练集上通过Adam优化算法最小化((5)式)来训练神经网络,获得的损失函数曲线见图3.在训练过程中使用的初始学习率为2×10-4,训练轮次总数为50,批尺寸为128,dropout共有三处,在图1所示中四个”Fully connected layers”之间各有一处,dropout值都为0.5,即随即丢弃50%的神经元之间的连接.从图3可知,前10个训练轮次,训练集的损失函数曲线从3.5快速下降到0.5,随着训练轮次的增加,损失函数的值缓慢下降并趋于平稳,在第50个训练轮次时下降到0.1左右.
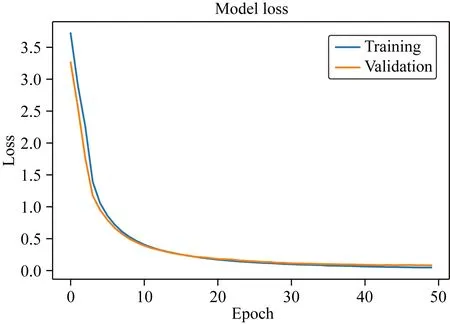
图3 模型训练时训练集和验证集对应的损失函数值曲线
同时深度卷积神经网络模型在训练集和验证集上的准确率见图4.前6个训练轮次中,模型在训练集上的准确率从约50%快速提升至约98%,后缓慢波动提升,在第50个训练轮次时,模型在训练集上的准确率达到99.46%.
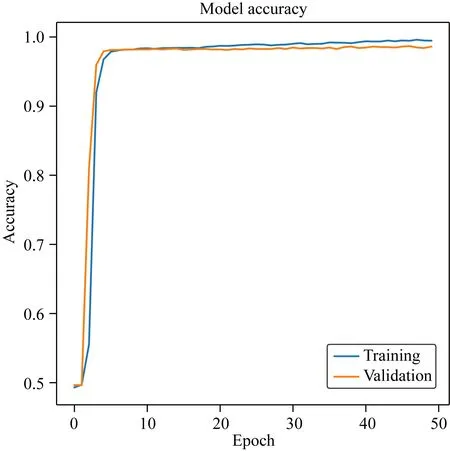
图4 模型训练时训练集和验证集对应的准确率变化曲线
2.3 训练结果和分析
包含1440个尘埃碰撞引起的电势差信号和1440个非尘埃碰撞引起的电势差信号的测试集在训练好的模型上的结果见表1.
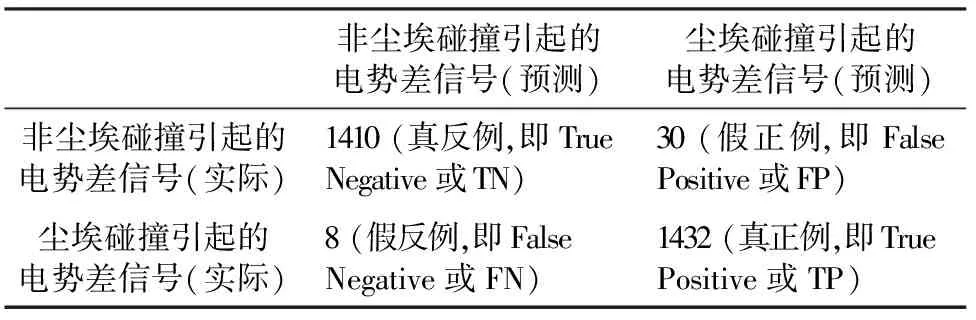
表1 测试集在训练好的深度神经网络模型的预测结果
准确率accuracy,即正确分类比例,模型在测试集的准确率为98.68%.准确率计算公式见(7)式:
(7)

查全率recall,即被模型正确分类为尘埃碰撞引起的电势差信号(TP)在所有实际尘埃碰撞引起的电势差信号(TP+FN)中的比例,查全率为100%表示所有实际为尘埃碰撞引起的电势差信号都被模型预测为尘埃碰撞引起的电势差信号,反之查全率为0表示所有实际为尘埃碰撞引起的电势差信号都被模型预测为非尘埃碰撞引起的电势差信号.模型在测试集的查全率为99.44%.查全率计算公式见(8)式:
(8)
查准率precision,即被模型正确分类为尘埃碰撞引起的电势差信号(TP)在所有被模型分类为尘埃碰撞引起的电势差信号(TP+FP)中的比例,查准率100%表示被模型预测为尘埃碰撞引起的电势差信号全部都是实际的尘埃碰撞引起的电势差信号,反之查准率为0表示所有被模型预测为尘埃碰撞引起的电势差信号实际上全部都是非尘埃碰撞引起的电势差信号.模型在测试集的查准率为97.95%.查准率计算公式见(9)式:
(9)
除了以上三个评价标准,还可以引入在太阳风风速预报中使用的threat score(Owens et al., 2005; Yang et al., 2018),在本文中即被模型正确分类为尘埃碰撞引起的电势差信号(TP)在除去被模型正确分类为非尘埃碰撞引起的电势差信号(TN)后剩余所有信号(TP+FP+FN)的比例,为97.41%.threat score计算公式见(10)式:
(10)
本文在google colab上使用内存为16 GB、GPU为Tesla P100-PCIE的云端计算机上使用tensorflow框架训练模型,耗时32 min.训练好的模型在预测测试集信号时,1 s能预测的信号数量达到103量级以上,而103个信号对应的时长在22.9 s.如本文的测试集2880个电势差信号对应的时长是65.96 s,数据预处理中的连续电势差信号分割以及随机打乱对应的耗时约9 s,放入模型预测的耗时约2 s,保存结果耗时约1 s.也就是说在航天器运行过程中,使用已经训练好的深度卷积神经网络模型可以在理论上实现对航天器电势差信号的实时检测.
本文的方法可以用于实际航天器电势差信号的尘埃碰撞事件识别,但无法直接将本文根据MAVEN航天器LPW载荷的电势差数据训练出来的深度卷积神经网络模型直接用来识别其他航天器的实际数据.因为不同航天器处于的不同空间环境必然导致数据分布不同且在不同空间环境下尘埃碰撞引起的电势差信号可能呈现不同特征.在训练模型之前,需要利用实际数据制作带标签的符合实际数据分布的数据集,然后再采用和本文相同的步骤重新训练模型.
3 结论与讨论
本文基于深度卷积神经网络提出了一种从航天器电势差信号识别尘埃碰撞事件的技术.基于这个技术,理论上可以实现航天器电势差信号的实时识别.训练模型前,地面工作站需要把传输回来的电势差信号预处理,值得一提的是,倘若此时预处理中直接武断地将实际连续电势差信号以等间距分割,可能导致单个尘埃碰撞引起的电势差信号波形被分割到两个甚至多个独立电势差信号中,势必会影响后续模型训练以及信号检测.可行的解决方案是在分割前引入一个检测机制,例如在检测到电势差信号快速波动时(快速增加或快速下降),把这个作为一个独立信号的开端,再使用定长来截取信号,如本文中的1501×1对应的22.9 ms时间长度的独立电势差信号,这可以保证尘埃碰撞引起的电势差信号被完整记录在截取后的独立电势差信号中.再对这些独立的电势差信号打标签,放入模型,对模型进行训练.在训练好模型后,不管是继续以电势差信号传送回来再检测的方式还是将训练好的模型上传至航天器系统从而在航天器上检测电势差信号的方式,电势差信号可以在理论上得到实时信号检测,从而快速准确地获得航天器周围空间尘埃分布情况.
深度神经网络在航天器信号识别的应用前景很广,本文相关未来工作会集中在两个方面.第一个方面,尝试对模型性能做更多对比论证并提升,如可以考虑在预处理过程中加入傅里叶变换尝试从信号频域上提取特征,这点在地震波波形识别以及分析上得到了印证(孟小红等, 2008; 张华等, 2017).在模型选择时除了本文使用的以卷积神经网络为主的用以提取电势差信号时间结构的模型之外,也可以考虑从电势差信号时序关系上入手,尝试使用循环神经网络如LSTM,比如电离层对流电势模型(邓天云等, 2022).或者尝试使用常用于视觉图片识别的YOLO模型,比如对空间多目标的识别(Liu et al., 2019).在训练时,可以使用数据增强来增加数据数量提升训练效果.第二个方面,尝试识别其他事件.本文把尘埃碰撞引起的电势差信号之外的所有信号都归为非尘埃碰撞引起的电势差信号(噪声),其中也有很多事件值得去识别,如可以在噪声中尝试提取种类众多的空间等离子体波动信号.
致谢感谢NASA提供MAVEN下LPW的电势差数据.该数据可以从NASA下PDS/PPI官方网站免费获得(https:∥pds-ppi.igpp.ucla.edu/mission/MAVEN/MAVEN/MAG).非常感谢审稿人和编辑的意见和建议.感谢南方科技大学地球与空间科学系陈克杰老师《地球科学大数据与人工智能》课程的帮助指导.
